
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于模型的商用车气动制动系统建模与优化
摘要
制动系统是主动安全系统之外,还代表着车辆动力学的重要方面。车辆的减速和停止距离完全取决于制动系统的性能以及所有组件的功能。但是,整个系统的性能预测是一项艰巨的任务,特别是对于复杂的配置(例如多轴车辆应用)而言。此外,由于其复杂性,大多数情况下,通过某些方法进行的性能预测仅限于静态条件。因此,拥有等效的数学模型来预测所有不同条件下,对于给定配置的所有性能参数是非常重要的。
本文介绍了采用的系统建模方法来对气动制动系统的所有元件进行建模,例如双制动阀,继动阀,快速释放阀,前后制动执行器,基础制动器等。这些模型的结果,例如制动过程中的瞬态压力响应,停车距离,车辆的减速度,已经通过测试数据进行了验证,并针对不同应用进行了验证。使用这些模型,整体制动体系结构和相应的元素已针对性能、成本和效率进行了优化。
介绍
制动系统在汽车安全中起着至关重要的作用。车辆中使用了不同类型的动力辅助制动系统,例如液压,空气,空气液压和电动制动器等。空气制动器或气压制动器由于其制动效率和适用范围而成为商用车流行的制动系统之一。然而,由于其许多子系统的复杂性,使气动制动系统的性能和成本达到最佳配置是一项艰巨的任务。
此外,整个系统的性能也可能受所有这些子系统在车辆上的位置的影响。因此,为了获得最佳的配置和性能,绝对需要科学的方法以及气动制动子系统和系统的相应建模。空气和液压制动系统的理论已在[1、2、3]中得到了很好的研究。但是,这些研究仅限于系统静态特性,例如制动力在前后桥上的分配以及相应的制动效率。从文献中获得的关于这些子系统和系统的动态特性的信息非常有限。通常,由于空气压力的响应相对于液压压力较慢,因此空气制动系统比液压制动系统的延迟时间更长。这种延迟的主要原因之一是空气的可压缩性和许多其他因素造成压力损失。最终,这会延迟响应时间,进而影响制动性能。对于制动事件具有良好的响应时间,始终优选较短的延迟时间。气动制动系统由许多阀组成,例如双制动阀(DBV),快速释放阀(QRV)和继动阀(RV),制动腔(BC)等,以调节压力并达到预期的制动性能。为了最终确定制动系统要求,对每个子系统模型进行建模很重要
此外,开发的模型将有助于为不同结构的车辆配置制动系统。空气制动系统气动子系统的非线性模型将制动腔中的压力与双制动阀柱塞的位移以及向双制动阀的供气压力联系起来,并在[4,5]中提出。这些研究将整个阀门视为建模的单个孔口。然而,这些阀的入口和出口的开口面积和相应的排放系数是不同的,必须将其建模为不同的孔口。但是,关于该领域的研究[7,8]并未考虑所有阀门的动态特性,但这是性能预测的重要参数。除此之外,这些阀在车辆上的位置带来了额外的复杂性,这将是在车辆开发阶段就预先知道的。因此,了解整个制动系统中每个子系统的物理特性非常重要。此外,还需要考虑其他聚集体的影响,例如动力传动系统及其惯性和摩擦,用于负载传递的悬架以及用于提供附着力的轮胎等,以计算合理的准确性能。
本文提出了用于整个制动系统建模的基于模型的方法,该方法可以解决不同的车辆配置和应用问题。该方法的子系统和系统模型已通过实验室模拟与验证,并且车辆模拟与实验的结果显示出了很好的相关性。
为什么基于模型的设计
如前所述,气动制动系统涉及许多个子系统。在所有操作条件下,从这些子系统中获得预期的性能参数非常重要。因此,绝对有必要对每个子系统进行详细建模。为此,基于模型的设计方法提供了一个识别和量化子系统目标以及实现这些目标的方法的平台,它还为不同的选择提供了机会[9]。
更重要的是,使用这种方法可以很好地理解和解决子系统集成到系统中的问题。在车辆中,许多系统(例如制动,悬架和轮胎等)需要一起执行以实现所需的性能制动性能。因此,基于模型的设计方法更适合这种情况。这将为高级系统(如防抱死制动系统(ABS),电子制动系统(EBS),电子稳定控制(ESC))和其他高级安全系统(如自主紧急制动系统等)的集成以及相应的控制的开发提供灵活性。
气动制动系统和挑战
图1显示了具有三轴的商用车的气动制动系统的示意图。该系统由主要元件(例如DBV,QRV,RV和制动室等)组成。
图1.三轴商用车的气动制动系统示意图
完整的商用车气动制动系统的工作原理在[1、2、10]中有很好的解释。制动系统中的每个子系统(请参见图1)在实现所需的制动效率方面起着非常重要作用。此外,为了实现车辆的均匀减速,在车辆的不同轴位置处的每个制动室实现相同的响应时间(压缩空气到达各个制动室的最小时间)是非常重要的。但是,不同阀门的位置以及压缩空气通过管道的相应路径在很大程度上取决于包装的限制。对于更长的轴距车辆和多轴车辆来说,这是一个挑战。此外,不同的联轴器的作用会导致阀门开度的面积发生变化,并且相应地改变管路的方向,也会影响空气的质量流量。除上述之外,如何将给定车辆的优化配置与每个子系统的不同选项融合在一起也是面临的主要挑战之一。本文介绍了系统建模的方法,为上述所有挑战提供了解决方案。
基于模型的制动系统设计方法
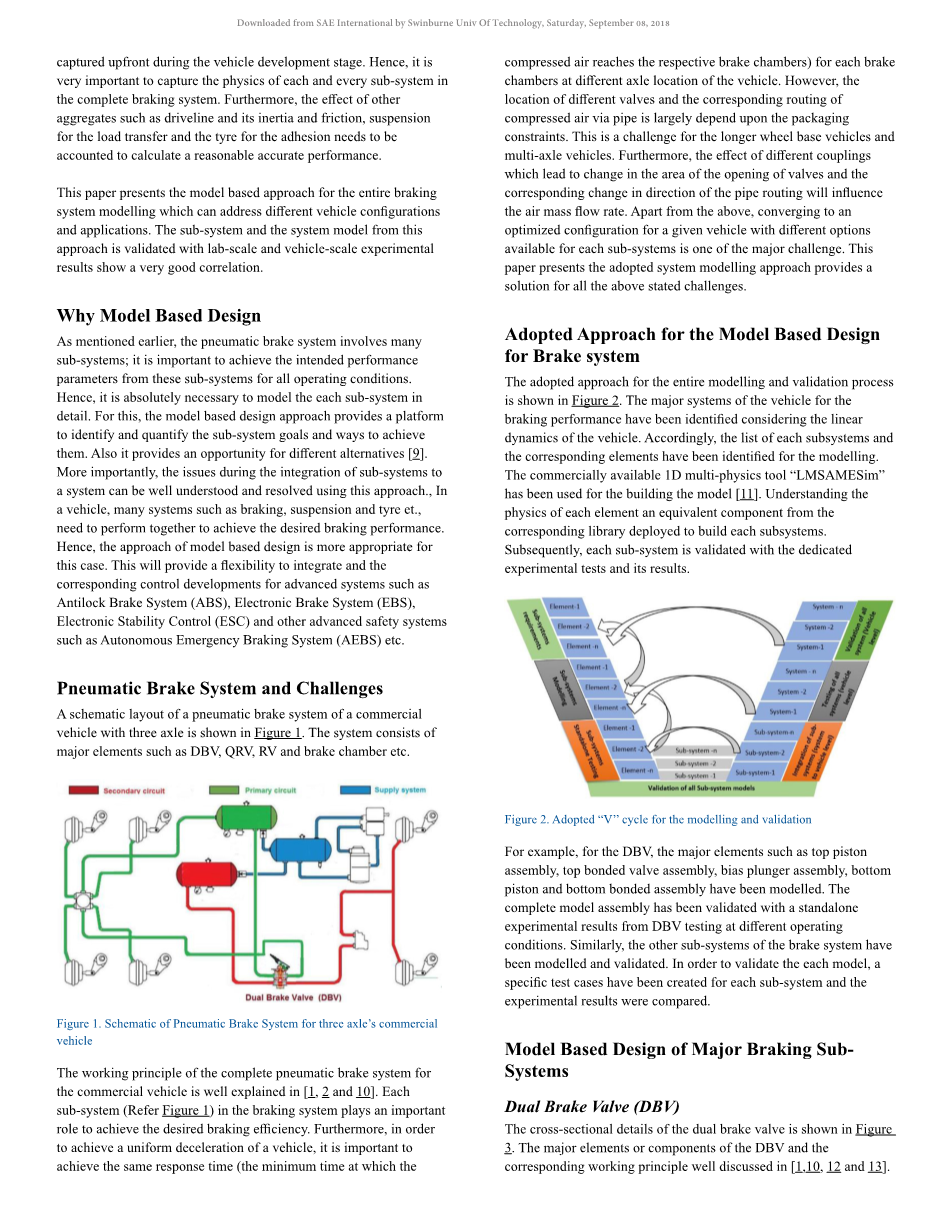
整个建模和验证过程采用的方法如图2所示。考虑到车辆的线性动力学,已经确定了用于制动性能的车辆的主要系统。因此,已经识别出了每个子系统和相应元素的列表用于建模。市场上可用的一维多元物理建模工具“ LMS AMESim”构建模型[11]。了解每个元素的物理原理,从相应库中部署等效组件来构建每个对象。随后,每个子系统都通过专门的实验测试并对其结果进行验证。
图2. 采用“V”周期进行建模和验证
例如,对于双制动阀,已经对其主要元素进行了建模,例如顶部活塞组件,顶部粘结阀组件,偏置柱塞组件,底部活塞和底部粘结组件。完整的模型装配已通过双制动阀在不同操作条件下测试的独立实验结果进行了验证。同样,制动系统的其他子系统也已建模和验证。为了验证每个模型,已经为每个子系统创建了一个特定的测试用例,并对其实验结果进行比较。
基于模型的主要制动子系统设计
双制动阀(DBV)
图中显示了双制动阀的横截面细节如图3所示. 双制动阀的主要元素和组成部分以及相应工作原理在[1、10、12、13]中进行详细的讨论。
图3.双制动阀[12、13]
从图3可以看出,双制动阀的所有主要元素都是串联放置的。因此,可以使用以下方程式对主要元素(例如柱塞、顶部活塞、底部活塞、顶部阀和底部阀组件)的位移进行建模。
(1)
其中质量,阻尼和刚度矩阵分别定义为公式2、3、4。
(2)
(3)
(4)
其中,M、C和K表示质量,阻尼和刚度,下标1至5分别属于柱塞,顶部活塞,顶部阀,底部活塞和底部阀。各端口的排气量与位移间隙定义如下:
(5)
(6)
(7)
其中,x1,x2,x3,x4和x5分别是柱塞,柱塞,顶部活塞,顶部阀,底部活塞和底部阀的排量.类似地,a1和a2分别是顶部活塞和阀之间以及底部活塞和底部阀之间的间隙。双制动阀内部的各种气流通道都被建模为具有可变面积的孔口,该面积被定义为活塞升程的函数。通过每个孔口的质量流量基于公式8计算。
(8)
其中,“A”是等式11中定义的用来模拟挡板阀可变流量区域面积的变量值。Cm是根据流量的特性计算的质量流量参数,可以将其描述为等式9。Cq是排放系数 ; Pup是上游气压,Tup是上游空气温度。
(9)
其中,“gamma;”是比热比, Pdown是下游空气压力,Tdown是下游温度。Pcr的关系如下式10所示[11]。
(10)
如前所述,将挡板阀建模为可变流量区域,其定义式见方程式11,相应示意图如图4所示。
(11)
图4.挡板阀的示意图
测量了各个组件的长度,宽度和直径等参数;同样,还从五个样本中测量了孔的直径和弹簧刚度,并在模拟中考虑平均值。此外,根据Perry多项式方程和试验结果建立了流量系数。佩里多项式方程适用于面积恒定的孔。然而,对于具有可变面积的阀门,Cd值是根据与实验结果的最佳相关性得出的。
用实验数据验证模型
为了验证开发的模型,已对独立的双制动阀进行了一系列实验。已将恒压源连接到双制动阀的主输入和副输入,并根据双制动阀的已知的柱塞位移在主出口和副出口测量了压力。已经记录了压力随时间的变化。实验和模型的比较分别在图5和图6中给出,分别用于一次和二次储气罐。从这些图中可以看出,仿真模型很好地捕获了双制动阀的所有动态行为。
图5.主出口模拟与实验压力比较 图6.副出口模拟与实验压力比较
继动阀(RV)
继动阀用于制动回路中,以减少启动之间的时间间隔,从而缩短制动启动时间(请参见图7)。在更长的轮距车辆的情况下,由于双制动阀的空间位置,致动后制动器所需的时间相对较长,因此继动阀通过将压缩空气迅速提供给制动腔来消除间隙。
此外,它还用于在释放阶段排出空气,从而减少了释放时间。双制动阀和继动阀之间的区别在于,制动阀的控制信号是踏板提供的力,而继动阀的控制信号是来自双制动阀的压缩空气。因此,继电器的建模与DBV非常相似。
图7.继动阀[13]的横截面示意图
用实验数据验证模型
与双制动阀相似,已经进行了实验来验证仿真模型。实验装置由连接到供应端口的恒压源和两个连接到继动阀的两个输出端口的输送箱组成。供气信号和输送压力由压力传感器测量。实验是针对两个不同的操作进行的。快速填充和缓慢填充。用恒定源供应压力,而信号压力在最小值和最大值之间变化。图8显示了慢速填充情况下仿真数据和实验数据的比较,可以看出实现了非常好的相关性。
图8.继动阀的仿真和实验数据比较
快速释放阀(QRV)
如前所述,快速释放阀的功能是加快执行器的排气速度。与在双制动阀上采用的方法类似,快速释放阀的所有元素(例如隔膜,供应口,输送口和排气口)都已建模。
用实验数据验证模型
将恒定压力源连接到快速释放阀的输入端口,类似地,将两个储罐连接到输送端口。对于已知的供给输入,测量输送罐处的压力。图9中给出了仿真与实验结果的比较,在整个压力信号测量中都实现了很好的相关性。
图9.快速仿真和实验数据的比较
制动室
制动室的示意性结构如图10所示。该系统已使用等效元件建模。为了提高精度,考虑了膜片的非线性。此外,为了计算质量流量,采用挡板阀方法。由于该子系统相对不那么复杂,因此没有单独的验证实验。相反,它已在完整的制动系统上得到验证。
图10.制动气室的结构示意图[13]
基础刹车
基础制动器将制动腔上的柱塞力转换为制动扭矩。制动鼓产生的制动扭矩取决于制动衬片和制动鼓之间的摩擦系数,该摩擦系数取决于制动腔的作用力,温度和制动速度。
完整制动系统的验证
为了验证完整的制动系统,已使用双制动阀的已知输入测量了制动室的响应时间。此外,还测量了平均扭矩以验证完整的制动系统模型。图11给出了两轴商用车辆的前制动腔的仿真和测试数据的比较。尽管在初始阶段发现的压力存在细微差异,但总压力的建立和饱和度与实验结果具有很好的相关性。初始压力的差异可能是由于每个阀中不同弹簧的初始非线性刚度引起的。
图11.两轴商用车前制动腔响应时间的比较
其次,测量了产生的平均扭矩,并将其记录在下表1中。完整的基础制动器的转动惯量为67Kg-m2。以下数据表明,开发的模型与实验数据具有很好的相关性。
|
仿真() |
测试() |
|
|
平均扭矩 |
1237 |
1285 |
表格1.平均扭矩比较
除了完整的制动系统外,其他主要系统(例如车身质量,悬架,轮胎,完整的传动系)也经过建模,可以计算出车辆的减速度。但是,以上主要车辆系统的建模不在本文中。
制动电路的优化
可以使用上述建模方法及其相应的验证方法来开发任何制动电路配置。三轴车辆的制动电路原理图如图12所示。考虑到阀门,系统和连接所有这些元件的管道的不同制造方式的多种选择,设计人员必须选择正确的组合,以满足制动性能要求并保持系统成本尽可能低。开发此类模型的优势为制动器设计人员提供了一个机会,可以运行尽可能多的虚拟组合进行优化并满足目标函数。目标函数可以是最短响应时间,充气和排气速率以及车辆的减速度或停止距离。
图12.三轴商用车制动电路示意图
本文以一辆三轴汽车为例,对制动系统压力、继动阀和管路直径进行了优化设计。从图12中可以注意到,前制动回路中使用了一个中继阀,后制动
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238832],资料为PDF文档或Word文档,PDF文档可免费转换为Word

