英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
多轴光电力传感器环境干扰抑制的机器学习方法
J. Gafford a,, F. Doshi-Velez a, R. Wood a,b, C. Walsh a,b
哈佛大学工程与应用科学学院,马萨诸塞州剑桥市牛津街60号,邮编02138
威斯生物启发工程研究所,美国马萨诸塞州波士顿市黑帆圈3号,邮编02115
摘要
光强度调制(LIM)力传感器在外科机器人和柔性系统领域引起了越来越多的兴趣。然而,这种传感模式是出了名的容易受到环境影响,如温度和环境辐照度,这可以登记为错误的力读数。我们探讨机器学习技术,以动态补偿环境偏差,困扰多轴光电力传感器。在这项工作中,我们制造了一个多传感器:三轴LIM力传感器与集成的温度和环境辐照度传感通过一个单片,折纸灵感制造工艺称为印刷电路MEMS。我们探索机器学习回归技术,以补偿温度和环境光灵敏度使用船上环境传感器数据。我们将基于批量处理的岭回归、核化回归和支持向量技术与基线的普通最小二乘估计进行了比较,结果表明,在可变照明和温度高的(gt;100◦C)温度梯度下,车载环境监测可以显著提高传感器的力跟踪性能和输出稳定性。通过使用描述环境扰动和跨轴耦合效应的非线性函数来扩大最小二乘估计,我们可以将X、Y、Z轴的力的误差分别减少10%、33%和73%。我们评估了每种算法在预测精度和计算开销方面的可行性,并分析了在在线力反馈和手术机器人触觉应用环境下预测的基于内核的回归。最后,我们建议未来使用随机、稀疏核技术进行快速逼近和预测。
关键词:
光强度调制力传感器,手术机器人,机器学习,非线性回归
介绍
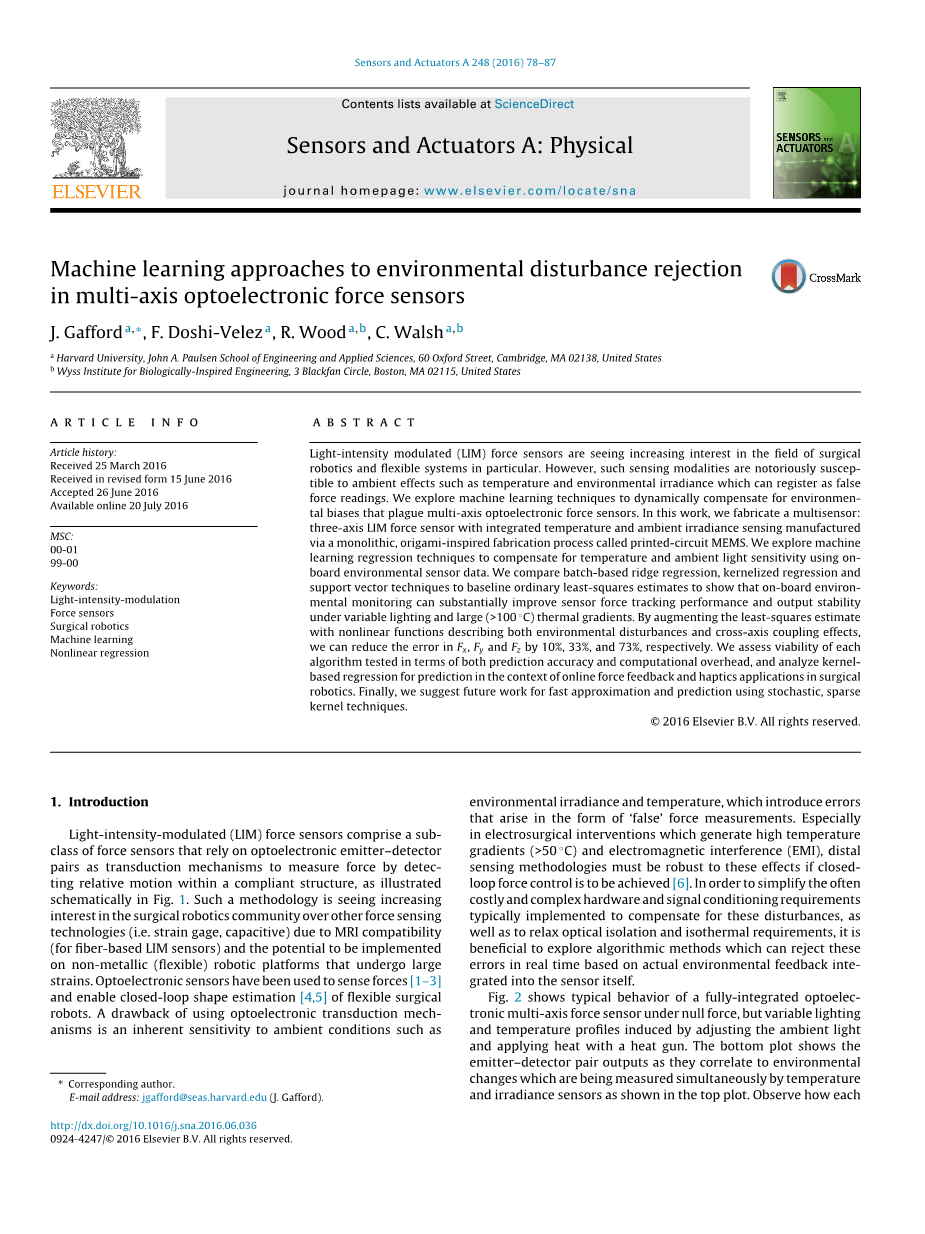
光强度调制(LIM)力传感器包括一个力传感器的子类,它依靠光电发射探测器对作为转换机制,通过检测顺应结构内的相对运动来测量力,如图1所示。由于MRI兼容性(用于基于光纤的LIM传感器)以及在承受大应变的非金属(柔性)机器人平台上实现的潜力,这种方法在外科机器人领域引起了越来越多的兴趣。光电子传感器已被用来感知力量[1-3],并使闭环形状估计[4,5]的柔性手术机器人。使用光电子转导机制的一个缺点是对环境条件的固有敏感性,如环境辐照度和温度,它们会引入以“假”力测量形式出现的误差。特别是在电外科干预产生高温梯度(gt;50◦)和电磁干扰(EMI),如果要实现闭环力控制[6],远端传感方法必须是稳健的这些影响。为了简化往往昂贵和复杂的硬件和信号调节需求通常实现来弥补这些障碍,以及放松光学隔离和等温需求,它是有益的探索基于算法的方法可以拒绝这些错误实时根据实际环境集成到传感器本身的反馈。
图1所示离散分量光强调制传感原理简化示意图
图2显示了一个全集成光电子多轴力传感器在零力下的典型行为,但是通过调节环境光和热枪加热诱导了可变的照明和温度剖面。底部的图显示了发射-探测器对输出,因为它们与环境变化相关,而环境变化是由温度和辐照度传感器同时测量的,如顶部的图所示。观察每一个发射器/探测器对光的相对变化有不同的响应(用浅绿色阴影表示),而所有传感器之间的温度依赖关系在某种程度上是一致的(用浅红色阴影表示)。我们看到,即使没有施加力,这些效应也可以被解释为力的读数;因此,环境补偿的必要性是显而易见的。
在面对非线性、干扰或其他有害影响时,已经有一些利用机器学习技术来改进传感器性能的前期工作。神经网络已被用于多轴力传感器的非线性逼近[7-9]。利用人工神经网络对电容式湿度传感器[10]进行了线性化处理。我们选择不选择神经网络,因为它们有过度拟合数据的倾向,需要大量的超参数来优化,并且不能保证收敛到局部最小。较新的技术,如局部加权投影回归(LWPR)已用于力控制应用程序[11];然而,与神经网络一样,局部加权投影回归通常需要优化许多超参数。摘要采用核支持向量机对多轴应变传感器[12]中的非线性函数进行交叉轴耦合项拟合,并对光电位移传感器[13]和电容式压力传感器[14]中的非线性和环境效应进行补偿。据作者所知,在应用基于内核的机器学习技术来主动地拒绝热和环境光干扰,同时近似光电子多轴力传感方法的跨轴耦合关系方面,还没有文献。 在此,我们描述了一个多轴传感器的设计和制造与板上的温度和辐照度传感能力使用一个新的单片制造工艺称为印刷电路结晶器电磁搅拌(PCMEMS)[15]。建立在之前工作在单片传感器制造[16]和分立元件LIM力传感器[17],我们提高性能通过开发一个模型系统,包括环境和横轴误差项和尝试使用简单的线性近似这些影响技术(岭回归),内核技术(kernelized岭回归,敏感的支持向量回归),和随机方法(次阶梯支持向量回归)。我们评估每一种方法在训练和预测方面的准确性和计算复杂度。总的来说,我们证明了多轴光电传感器的性能可以通过包含对环境数据的估计而大幅度提高。我们还演示了基于非线性内核的方法可以显著提高性能,并讨论了如何将这些技术应用于可部署实现的在线评估。总之,这项工作的贡献是双重的:(1)实现高质量LIM多轴力传感器的单片制造方法和(2)探索机器学习技术来消除干扰和近似(和补偿)跨轴项。结果是一个高精度光电多轴力传感器,其误差范围为plusmn;2.5 N、plusmn;2.5 N、plusmn;5n, Fx、Fy、Fz的全尺寸误差分别为2.6%、1.8%、2.6%。另外,传感器的行为是稳定的测试热梯度超过100◦C。
- 传感器设计与建模
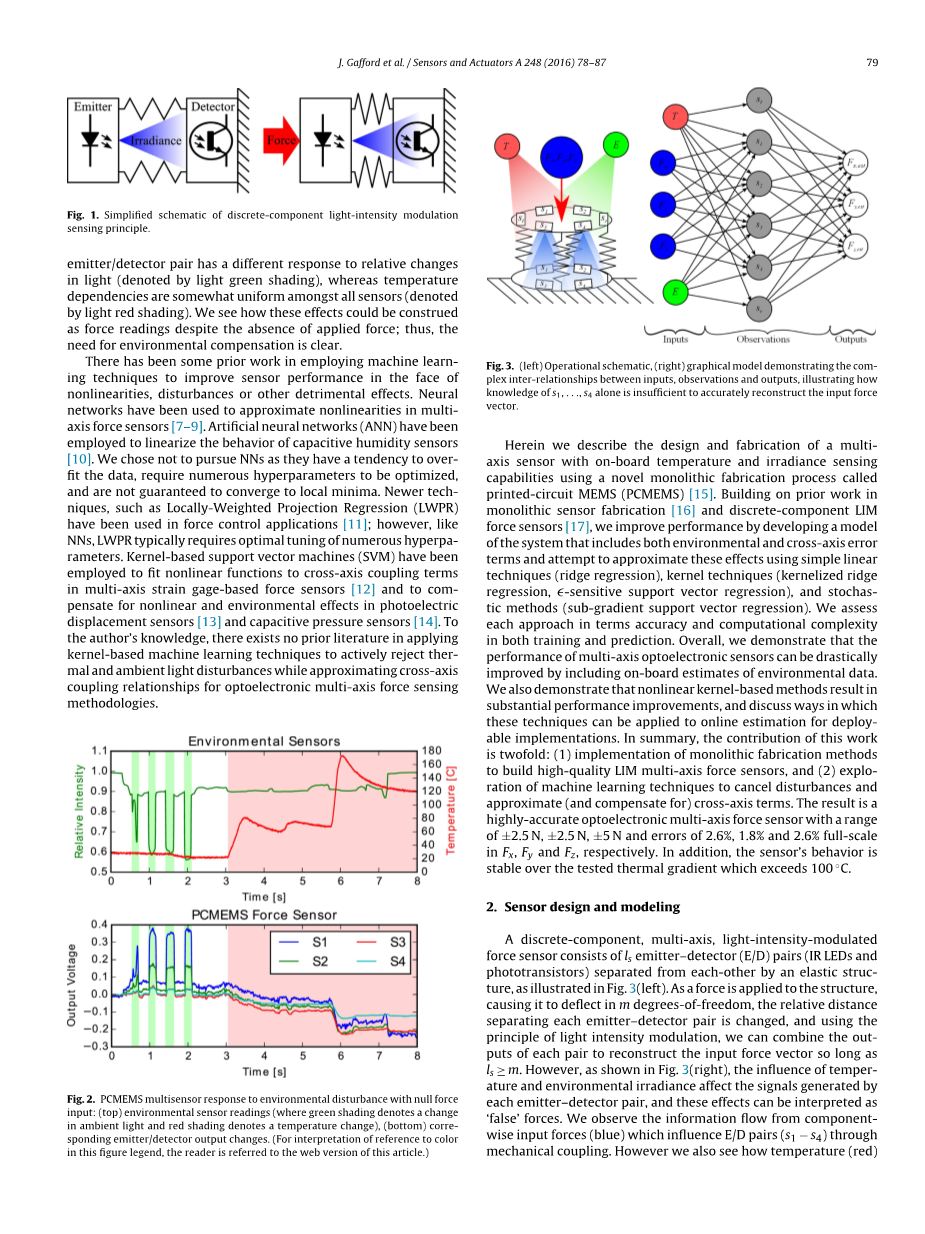
一种离散分量、多轴、光强调制的力传感器由由弹性结构分开的雷射-探测器(E/D)对(红外发光二极管和光电晶体管)组成,如图3(左)所示。当一个力是应用于结构,使其转移在m个自由度,每个发射探测器之间的相对距离变化,并使用光强度调制的原理,我们可以结合每一对重建输入的输出力向量只要lsge;m。然而,如图3所示(右),温度的影响和环境照度影响每一对发射探测器所产生的信号,这些影响可以被解释为“错误的”力量。通过机械耦合,我们观察了影响E/D对(s1 - s4)的组件输入力(蓝色)的信息流。但是我们也看到温度(红色)辐照度(绿色)也通过热耦合和光学耦合影响s1minus;s4。当根据现有的传感器数据重建力时,用s1 - s4单独的方法不可能从热辐射和辐照效应中分辨出实际的输入力。如果我们可以通过沙粒来分别观察这些环境影响,我们就可以近似它们对整个系统的影响,并在最终的重建中消除它们。
2.1解析和数值模拟
系统的发展中一个简单的力学模型,考虑三维输入的力向量f = (fx, fy, fz)和它对任意间距的影响发射探测器。我们考虑刚度矩阵Kj包含大部分结构的刚度条件以及任何均匀作用力的位置之间的转换和发射探测器的位置对结构的△j,Kj。我们可以把它写成下面的形式:
(1)
在这里△j =[delta;jx,delta;jy,delta;jz] 是一个向量包含发射器和探测器之间的相对位移作用的力。注意,它是正定的,对称的,因此总是可逆的。因此,假设我们知道Kj,给定施加的力,之前的工作[17]表明,我们可以将发射器/探测器的Kj,△j电压输出建模为:
(2)
图4所示。基于有限元分析结果和分析建模相结合,给出了组件式有限元仿真结果(a)、(c)、(e)和相关(相对)集电极电流灵敏度(b)、(d)、(f)。
其中G为放大器增益,Rg为光电晶体管发射侧的电阻值,ILED为发射极正向电流,h为发射极与探测器之间的初始(未变形)间距,beta;和gamma;是制造商提供的缩放参数,Ɵj是发射器和探测器之间的失调角,给出了简单的模型如下:
(3)
对传感器的机械结构进行了有限元分析(Solidworks Simulation, Dassault systems),以了解三维输入力如何影响每个发射器/探测器的相对间距(即给定f,计算△j)这些结果与解析模型相结合,得到如图4(b)、(d)、(f)所示的理论灵敏度曲线。这将影响线性基础模型的保真度,我们将在后面几节中对此进行演示。最后,在期望的力范围内产生的集电极电流使我们知道需要多少增益才能将电流转换成适当的电压电平,而该电压电平可以由数据采集单元处理。有限元模型显示的应力水平在x、y和z的设计范围内分别为plusmn;2.5 N和plusmn;5 N,选择这些参数是为了使每个轴的机械安全系数至少为2.5。
2.2 制造
传感器采用MEMS打印电路制作[15,18]。复合层压板由四层75微米304不锈钢,两层25微米聚酰亚胺薄膜,两层25微米的聚酰亚胺薄膜与18微米的铜包层,七层杜邦Pyralux F0100粘合剂。材料的每一层都是用二极管抽运固体激光加工的,然后用热和压力把它们叠合在一起。在激光中重新加工层压板,使传感器结构从周围的组装支架中释放出来。经过纯二维激光加工和叠层加工,得到如图5(左)所示的复合结构。装配由四个轴对称的萨吕连杆装配引导,将装配运动力约束在z轴上(图5(中),(右)),使得装配体成为三维结构。这些联系也有助于防止扭转和结构的横向变形。最后的组装步骤包括手动将四根加劲梁折叠到相应的槽中,从而将输入力传递给受弯构件。组装完成后,将电气元件回流焊到顶部和底部柔性电路层上。制作的传感器直径约为10毫米,高度约为3.5毫米,然后集成到3D打印的外壳中进行封装。图6为不同集成阶段制作的传感器。如果施加足够的载荷,则装配的萨吕连杆机构就会“堵塞”套管内壁,从而提供机械“停止”,防止过载。
定制励磁和滤波电路,更彻底地描述在[17],将小从每个发射探测器电极电流(由来自于白光的HIR19-21C IR LED和PT19 - 21c光电晶体管组成)从白光到一个直流下的电压可以由数据采集处理单元。温度传感器(来自微芯片技术的MCP9701T-E/TT)是一个集成电路,包含所有必要的调节电路。环境传感器(PT19-21C)为低通滤波,截止频率为1khz。
图5所示。PCMEMS多传感器结构装配:(左)在进行脱扣切割后,(中)将传感器的轴对称萨吕连杆机构导向装配沿z轴,(右)将联锁加强筋折叠成相应的槽,将载荷传递给受弯构件。
图6所示。预制PCMEMS多传感器:(左)组装前的后期制作,仍然附着在组装支架上,(中)与放置的组件组装,(右)集成到3d打印外壳中。
2.3 实验装置
PCMEMS多传感器被刚性地固定在一个作为地面真值的网络芯片176-轴商用测压元件上。使用LabView以2 kHz的速率收集数据,时间约为135秒(PCMEMS多传感器使用USB-6002 DAQ, ATI Nano17使用PCI6259 DAQ,均来自国家仪器)。在数据采集期间应用了可变负载、照明和温度条件。使用热喷枪在环境温度上施加过多的热梯度。实验装置如图7所示。结果的数据集被随机打乱并分成比例为75%/25%的训练和测试集。结果是一个大约有n个至200,000个数据点的训练集和一个有n个至70,000个数据点的测试集。
图7所示。实验设置,显示封装的PCMEMS传感器直接安装在网络芯片16参考负载传感器上。
3 推论
在本节中,我们考虑一个简单的传感器线性推理模型作为比较的基线。然后,我们开发一个模型来描述温度、辐照度和横轴耦合的影响,以增强基线模型。我们探讨了线性和基于核的技术来优化增广模型的加权参数,并讨论了精度和计算复杂度方面的权衡。
3.1 基线模型(Moore-Penrose)
最常见的多轴力传感器标定方法应用校准配置文件(即静态或动态组合的力量),并记录传感器输出制定一个逆标定矩阵Wminus;1议员isin;Rmtimes;l,并执行Moore-Penrose pseudoinversion向前计算校准矩阵Wisin;R [19]。MP ltimes;m 摩尔-彭罗斯理论指出,对于任何一个矩形矩阵C,都存在一个满足这四个彭罗斯条件的唯一矩阵C 。摩尔-彭罗斯理论的一个推论是,如果C具有行秩满,则矩阵C 可化为:
(5)
如图所示,校正矩阵Cequiv;等于未正则化的普通最小二乘(OLS)解。 MP 在不考虑温度和环境光的情况下,对s,hellip;,sn个观测值(即Xisin;Rs)的时间序列进行最小二乘回归,得到如下校准矩阵:
(6)
= (7)
在 so = [so(1), . . .so(i), . . .so(N)]T isin; RN矩阵包含所有从传感器观测值,和Ycirc;MPisin;RNtimes;m矩阵包含N个样本估计力分量。对于三维力传感器,Ycirc;MP = [circ;fx,MP , circ;fy,MP , circ;fz,MP ] 其中 [fcirc;p,MP(1), . . .fcirc;p,MP(i), . .
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236508],资料为PDF文档或Word文档,PDF文档可免费转换为Word

