英语原文共 17 页
为智能车辆系统生成精确高效的车道级路线图
Gi-Poong Gwon,Woo-Sol Hur,Seong-Woo Kim,IEEE会员,Seung-Woo Seo,IEEE会员
摘要 - 智能车辆系统的发展导致对高精度路线图的需求增加。然而,用于车辆导航系统或地理信息系统(GIS)的传统道路地图不足以满足诸如自动驾驶的智能车辆系统的新要求。智能车辆系统有三个主要的路线图要求:厘米级精度,存储效率和可用性。但是,现有的研究并没有同时满足这三个要求。在本文中,我们提出了一个精确有效的车道级路线图生成系统,它可以同时满足各种要求。拟议的地图构建过程包括三个步骤:
- 数据采集,2)数据处理,3)道路建模。道路数据采集和处理系统通过移动3-D激光扫描仪采集数据,捕获精确的3-D道路几何数据。然后细化道路几何数据以提取元信息,并且在道路建模系统中,细化数据被表示为分段多项式的集合,以确保地图的存储效率和可用性。拟议的测绘系统已在真实的城市道路和高速公路上进行了广泛的测试和评估。实验结果表明,所提出的测绘系统在路线图要求方面优于传统系统。
索引术语 - 车道级道路地图,分段多项式近似,道路地图,道路建模。
-
- 介绍
S
学术界和业界已经开展了大量工作,以开发能够提供更高安全性和便利性的智能车辆系统[1],[2]。至
手稿于2015年9月21日收到;2015年12月23日修订;
2016年2月16日接受。出版日期2016年2月26日;2017年6月16日当前版本的日期。这项工作得到了韩国国家研究基金会的资助,该项目由科学,信息通信技术和未来规划部资助,资助2009-0083495;由知识经济部(MKE,韩国)资助的工业战略技术发展计划资助10042808(利用摄像机,雷达和道路特征开发驾驶员辅助系统);以及首尔国立大学新媒体与通信研究所和自动化与系统研究所。本文的评论由CVS的编辑协调。
G.-P.Gwon与韩国LG电子公司合作(电子邮件:gwons @ snu.ac.kr)。
W.-S.Hur和S.-W.Seo在韩国首尔首尔国立大学智能车辆IT研究中心工作(电子邮件:bpoebiapl@snu.ac.kr; sseo@snu.ac.kr)。
S.-W.Kim在首尔国立大学,首尔151-742,韩国(电子邮件:sinabrlo@snu.ac.kr)。
本文中一个或多个图的彩色版本可在线获取http://ieeexplore.ieee.org.
数字对象标识符10.1109 / TVT.2016.2535210
为此,必须有一个精确的车道级路线图,以提供各种自动驾驶车辆应用,如车辆路径或运动规划[3] - [6]和自我车辆定位[7] - [12]。此外,各种先进的驾驶辅助系统(ADAS),包括车道保持,车道变换辅助和燃料管理系统,都可以从精确的车道级路线图中受益[13]。
从技术角度来看,智能和自动车辆系统的地图必须满足以下三个要求:准确性,存储效率和可用性。首先,路线图应包含所有车道的几何形状,精确度为厘米级,道路的三维结构代表各种类型的道路,包括倾斜的道路,立交桥等。其次,道路的几何形状应该是以紧凑的形式表示,以便可以通过无线网络下载和更新地图。最后,道路几何应以适用于应用程序的格式表示。具体而言,应该需要低计算量来计算道路几何信息,包括来自道路地图的坐标,切线角度或曲率以提供实时操作。
传统的道路地图仅为车辆导航系统或地理信息系统(GIS)提供宏观信息;因此,已经进行了许多研究以产生旨在用于智能车辆系统的精确路线图。在[14]中提出了利用GPS和航位推算(DR)的中尺度车道级驾驶辅助的Emap结构。然而,地图的质量很容易受到数据采集过程的影响,并且不适合自动驾驶目的。用于自动驾驶的地图需要微尺度精度,但是这种精确的地图需要大量的存储空间并且具有低水平的可用性[15]。[16]中提出了一种映射系统,该系统可以生成适合自动驾驶目的的存储效率图,而不考虑车道,复杂的交叉点和三维交通结构,如立交桥和斜坡。
以前的研究很少考虑后两个要求,同时提供厘米级功能。在本文中,我们提出了一种路线图生成系统,该系统完全考虑了上述三个路线图要求。路线图生成系统由三个子系统组成,包括数据采集,处理和道路建模系统。数据采集和处理系统获取满足精度要求的精确道路几何数据,并引入数据采集系统,利用三维移动激光扫描(3-D MLS)数据获得高精度的三维道路几何形状。然后,道路几何
0018-9545copy;2016 IEEE。允许个人使用,但重新发布/再分发需要IEEE许可。
看到http://www.ieee.org/publications_standards/publications/rights/index.html 欲获得更多信息。
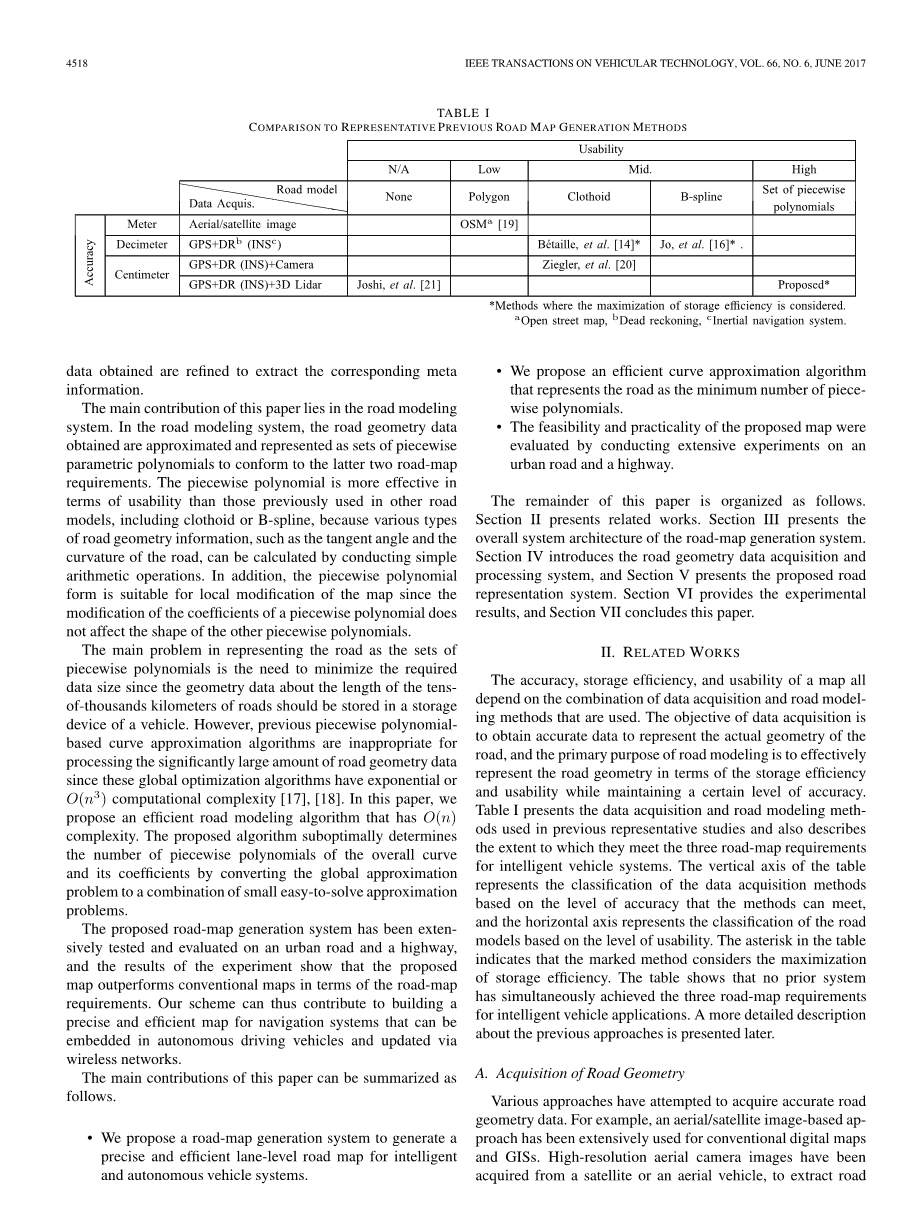
表我
与代表性的先前路线图生成方法的比较
|
|
|||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
|||||
|
|
|
|
|||||
|
|
|
|
|||||
|
|
|
|
|||||
获得的数据被细化以提取相应的元信息。
本文的主要贡献在于道路建模系统。在道路建模系统中,获得的道路几何数据被近似并表示为分段参数多项式的集合,以符合后两个道路地图要求。分段多项式在可用性方面比以前在其他道路模型中使用的更有效,包括回旋曲线或B样条,因为各种类型的道路几何信息,例如切线角和道路曲率,可以通过进行简单的算术运算。另外,分段多项式形式适合于局部修改映射,因为分段多项式的系数的修改不影响其他分段多项式的形状。
将道路表示为分段多项式集合的主要问题是需要最小化所需的数据大小,因为关于数万公里道路的长度的几何数据应该存储在车辆的存储装置中。然而,之前的基于分段多项式的曲线近似算法不适合处理大量的道路几何数据,因为这些全局优化算法具有指数或
O(n3)计算复杂度[17],[18]。在本文中,我们提出了一种具有O(n)复杂度的高效道路建模算法。所提出的算法次优地确定
通过将全局逼近问题转换为小的易于求解的近似问题的组合,整个曲线的分段多项式的数量及其系数。
拟议的路线图生成系统已在城市道路和高速公路上进行了广泛的测试和评估,实验结果表明,拟议的地图在路线图要求方面优于传统地图。因此,我们的方案可以为导航系统构建精确有效的地图,该导航系统可嵌入自动驾驶车辆并通过无线网络进行更新。
本文的主要贡献可归纳如下。
- 我们提出了一种路线图生成系统,用于为智能和自动车辆系统生成精确有效的车道级路线图。
- 我们提出了一种有效的曲线近似算法,该算法将道路表示为分段多项式的最小数量。
- 通过在城市道路和高速公路上进行广泛的实验来评估所提出的地图的可行性和实用性。
本文的其余部分安排如下。第二节介绍相关工作。第三节介绍了路线图生成系统的整体系统架构。第四节介绍了道路几何数据采集和处理系统,第五节介绍了拟议的道路表示系统。第六节提供了实验结果,第七节总结了本文。
-
- 相关作品
地图的准确性,存储效率和可用性都取决于所使用的数据采集和道路建模方法的组合。数据采集的目的是获得准确的数据来表示道路的实际几何形状,道路建模的主要目的是在保持一定精度的同时,在存储效率和可用性方面有效地表示道路几何形状。表I列出了先前代表性研究中使用的数据采集和道路建模方法,并描述了它们在多大程度上满足智能车辆系统的三个路线图要求。该表的纵轴表示基于该方法可以满足的精度水平的数据采集方法的分类,横轴表示基于可用性水平的道路模型的分类。表中的星号表示标记的方法考虑了存储效率的最大化。该表显示,先前的系统没有同时实现智能车辆应用的三个路线图要求。稍后将介绍关于先前方法的更详细描述。
- 获得道路几何
已尝试各种方法来获取准确的道路几何数据。例如,基于空中/卫星图像的方法已广泛用于传统的数字地图和GIS。已从卫星或飞行器获取高分辨率航空相机图像以提取道路
几何通过手工或图像处理手段[22] - [24]。基于图像的方法的优点在于我们可以通过处理单个图像来获得更大区域的道路几何形状。然而,航空/卫星图像的分辨率不足以提取精确的车道级道路几何形状。此外,由于图像不包含深度信息,因此无法获取道路的高程信息。因此,基于图像的方法的准确性限于仪表级。
许多研究采用基于探测车辆的方法来获得更精确的道路几何形状[13],[14],[16],[25] - [27]。在该方法中,配备有各种传感器的探测车辆探索道路并收集传感器数据以获得道路几何信息。在可能的各种传感器配置中,基于运动GPS的方法是最广泛使用的系统,包括实时动态(RTK)和后处理运动GPS。在该方法中,沿着道路(或车道)的中心线行驶的探测车辆的轨迹被记录为道路几何数据。道路几何的精度主要取决于车辆的定位精度;因此,许多以前的研究使用了将GPS与其他定位系统集成的算法,例如DR和惯性导航系统(INS),以提高车辆位置的准确性和可靠性[16],[28],[29]。
尽管基于GPS的方法在获得道路几何形状的精确度方面比基于图像的方法更有用,但使用该方法存在一些基本限制。首先,探测车辆捕获道路倍数信息的次数与车道数量一样多是低效的。这种重复性的工作既昂贵又耗费时间。第二个问题是所谓的轨迹误差。在基于GPS的方法中,期望探测车辆沿着车道的精确中心线行驶。然而,人类驾驶员实际上不可能长时间以厘米级精度控制车辆。因此,车辆轨迹与车道中心线之间的不一致是不可避免的。因此,使用该方法的准确性限于分米级。
近年来,已经引入了基于感知传感器的各种方法来解决使用基于GPS的方法的问题[20],[26],[30] - [33]。在这些方法中,通过使用捕获道路几何数据的感知传感器来检测和提取道路标记。由于道路几何数据是直接从车道标记信息中获取的,因此从根本上防止了上述问题。为此已经使用了各种传感器配置,包括单目相机[26],立体相机[20],以及2-D或3-D激光雷达[21],[31] - [33]。基于相机的方法的优点在于可以降低传感器的成本;然而,由于摄像机的固有限制,难以提取精确的3-D道路几何形状,即信息在2-D平面中表示。因此,3-D激光雷达是获取厘米级道路几何形状的最合适方式,因为它可以提供准确的道路三维信息。一些研究已经从三维激光雷达数据中提取了道路几何形状。在[31]中,提出了一种从三维激光雷达数据中提取道路几何的算法;然而,算法集中
提取道路区域而不是车道道路几何形状。在[32]和[33]中,考虑了从三维激光雷达数据中提取车道标记,但没有解决车道间的聚类问题。乔希等人。提出了一种基于粒子滤波器的方法,使用三维激光雷达数据提取车道级几何数据并在车道间聚类[21]。但是,该方法提取车道的中心线而不是车道标记点;因此,忽略车道标记(例如,虚线)的形状,这对于诸如车辆定位的智能车辆应用是有用的。在本文中,我们提出了一种三维激光雷达数据处理算法来提取和聚类车道标记点。
- 道路几何建模
具有适当的道路几何表示以确保存储效率和可用性以及地图精度非常重要。先前已经提出了各种道路几何模型[13],[14],[16],[26],[34],[35],但是之前的模型没有同时考虑这三个要求。例如,多边形广泛用于传统的数字道路地图和各种智能车辆应用,以表示道路几何形状,因为它们简单[19],[36] - [39]。然而,由于多边形不能精确地表达弯曲道路,因此需要太多的线段来表达具有大曲率的道路以达到厘米级精度。因此,不能同时满足精度和存储效率要求。另外,不能提供道路几何信息的直接提取,包括切线角度
资料编号:[5488]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

