英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
磁悬浮和弹簧组成的零功耗隔振系统
Takeshi Mizuno,Masaya Takasaki,Daisuke Kishita,Keiichiro Hirakawa
埼玉大学机械工程系,日本,埼玉338-8570,樱花谷,下255
摘要
通过分析和实验研究结合零功耗磁悬浮的主动隔振系统系统。由于零功耗的系统具有负刚度的特性,将它与普通弹簧串连在一起产生的无穷大刚度,可以用来抵消对隔振平台的干扰。即使把支撑隔振平台重量的悬浮物与串连部分并联结合,这种性能还能保留。使用单轴装置是这个系统的设计原则和特点。通过测量零功耗磁悬浮的力-位移特性估算负刚度特性。实验结果证明,零功耗磁悬浮串连普通弹簧产生的高刚度对隔振平台的静态直接干扰起到抵消作用。
关键字:磁悬浮;磁力轴承;动态控制;振动阻尼;弹簧;加速计
- 介绍
在许多高科技的生产和测量中,隔振起到了很大的作用,如半导体制造和高精度测量。科技的高速发展,刺激了人们对隔振系统更高的需求。这2种振动必须减小:1.从地面通过悬浮物传来的振动2.直接作用在隔振平台的干扰引起的振动。采用刚度较小的悬浮物更有利于减小第一种振动,这是因为振动源和隔振平台的动态耦合是很脆弱的。因此在这种情况下零刚度是最理想的。但是,较高的刚度更有利于抑制第二种振动,因为它减小了隔振平台的位移。因此这种情况下无穷大的刚度是最理想的。在传统的被动隔振系统中,必须在低刚度和高刚度之间做出权衡,这限制了它的性能。
相反,主动隔振系统没有这种情况。原则上,加入隔振平台的绝对速度反馈是解决性能限制的基本控制策略。这个系统被称为天棚阻尼。通过控制俩个自由度,可以有效地解决被动隔振的性能限制。尽管还有很多的其他控制方法,比如转态反馈,,反复动态加速控制也得到了应用,大多数主动隔振系统使用了高性能的传感器,比如用来检测低频领域振动的伺服型加速计。虽然这些传感器价格昂贵,但是主动隔振系统价格更贵,有时高达10倍,这不利于大规模的应用。
本研究提出了一种新型隔振方法。在零功耗的磁悬浮系统中,悬浮力是由电磁铁和永久磁铁组成的混合磁铁产生的。永久磁铁提供使磁力,使悬浮物悬能够悬浮。调节电磁力稳定悬浮系统,使线圈电流的偏差趋近于零。在这种控制下,零功耗磁悬浮系统具体负刚度的特性。无穷大刚度能抵消直接作用在隔振平台的干扰,这可以通过串连一个普通弹簧完成。其结果是,直接振动被抑制,而从地面转移来的系统振动也被减小了。通常零功耗磁悬浮系统只需要相对位移传感器,其成本远远低于伺服加速计。除此之外,通过运用自身的传感技术,传感器硬件可以省略。
本文安排如下。首先,对零功耗磁悬浮系统进行简单的描述。然后介绍隔振系统的基本模型。其次,分析系统的性能。最后,通过实验结果证明,产生无穷大刚度特性装置能有效地减小振动。
-
零功耗磁悬浮
- 基本模型
由于它的省电特性,零功耗控制已经运用到磁悬浮系统,如航天器的稳定动量轮,净化室的载波系统。在这种情况下,使用由电磁铁和永久磁铁组成的混合磁铁。控制电磁铁使线圈电流的稳定偏差趋近于零。其结果是空气间隙大小稳定,永久磁铁产生的磁力平衡了其它力,静态力作用在悬浮物体上。
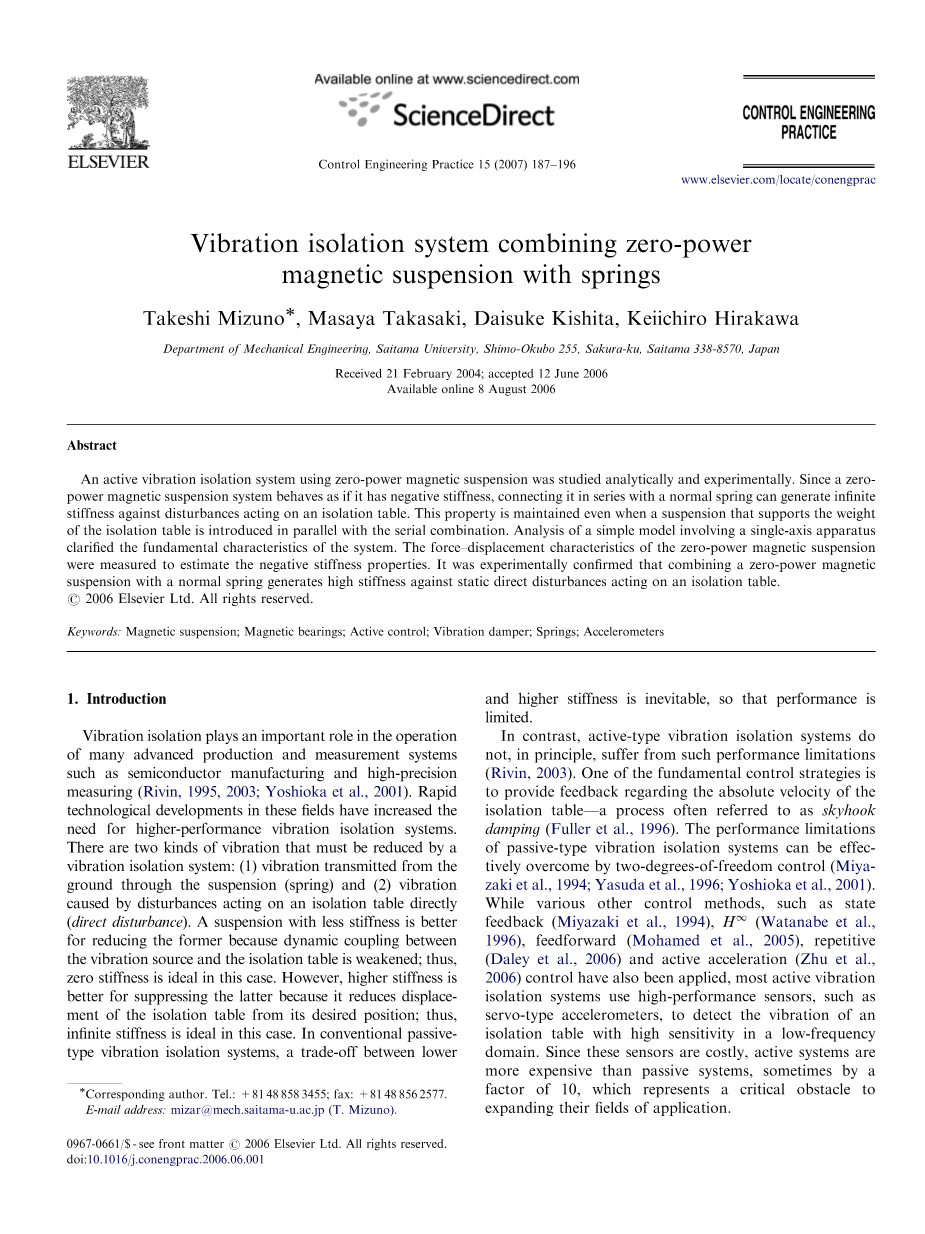
图一展示了一个单自由度的模型分析。质量m的悬浮物假定只在垂直方向移动。下面为运动方程式
其中x是悬浮物,和分别是间隙力系数和电流力系数,i是控制电流,是作用在悬浮物体的干扰力。
永久磁铁
图1.零功耗磁悬浮系统的基本模型
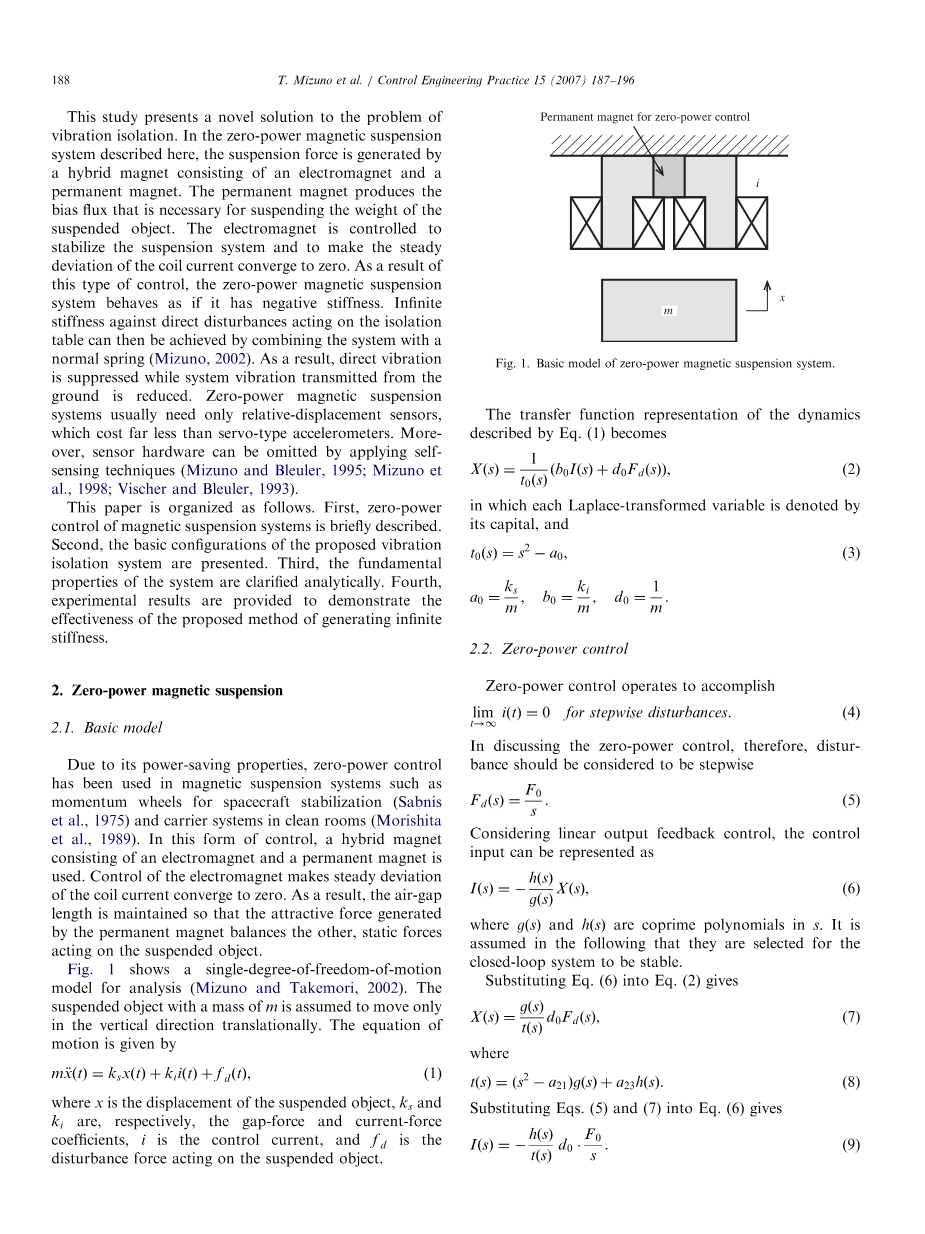
动态传递函数由(1)变为
其中每个拉普拉斯变量表示为
-
- 零功耗控制
对于阶梯式的干扰,零功耗由完成 (4)
因为是在讨论零功耗控制,因此,干扰应该是阶梯式的
考虑到线性输出的反馈控制,控制输入可以表示为
g(s)和h(s)是互质多项式,假定在闭环系统下它们是稳定的。把方程式(6)带入到(2)得到
把(5)和(7)带入到(6)得到
为了实现公式(4)描述的对象,h(s)修改为
其中是一个多项式。因此,该输入控制实现零功耗表示为
图2表示了零功耗控制器的一般形式
图2.零功耗控制器的一般形式 图4. 弹簧
图4. 零功耗磁悬浮系统和普通弹簧的比较
-
- 负刚度
零功耗控制系统的特点跟负刚度系统类似。如图3a所示,在一个普通的弹簧系统中,施加外力到重物上,重物向力移动。如图3b所示,在零功耗控制系统中,悬浮物向力的反方向移动,到达一个新的平衡位置。下面将会分析这一特点。
在稳定状态下,悬浮物保持在一个平衡位置
在零功耗控制系统中,线圈电流逐渐趋近与零
因此
负号表示新的平衡位置与力的方向相反。
当一个阶梯力作用在悬浮物体上时,物体向力的方向运动,然后到达一个新的平衡位置,如公式(14)所示。因此,零功耗磁悬浮系统具有静态感应刚度,刚度的振幅与间隙力系数和混合悬浮力系数一样。
-
隔振系统
- 概念
首先,连接一个普通弹簧和一个负刚度弹簧可以产生无穷大的刚度。如图4所示,当俩个弹性系数为k1和k2的弹簧连在一起时,总刚度表示为
从方程式可以看出,当把普通弹簧连接在一起时,总刚度比任何一个组成弹簧都要低。因此,如果其中一个弹簧为负刚度,其总刚度将变成无穷大的刚度。
在本研究中,高刚度在隔振系统中用于抵消直接作用在隔振平台的干扰。
关于负刚度隔振的应用,在1999年Platus和1994年Trimboli等做过报告。在他们的研究中,为了降低悬浮隔振平台的刚度,负刚度弹簧与正刚度弹簧共同使用。在我的研究中,负刚度弹簧和正刚度弹簧连在一起运用到隔振系统中。
-
- 系统结构
图5所示为一个隔振系统的结构。中间重物m1与弹簧k1和阻尼器c1连在一起,组成了常见的隔振器。电磁铁对面是隔振平台,是由软材料制作而成的,目的是抵消永久磁铁产生的磁场。这就是感应阶段。
这个系统可以通过减小k1而减小从地面上传来的振动,同时,通过放置负刚度为k1的弹簧产生无穷大的刚度,可以抵消直接干扰。为了更具体的解释后者:假定平台收到一个向下的力,由于磁悬浮的控制使平台与电磁铁的距离变得越来越小。也就是说,如果中间物体是固定的,平台会向上移动。
同时,由于磁悬浮力的增加,中间物体向下移动。在上述设置情况下,中间物体向下的位移使间隙不在减小。因此,隔振平台位置不变。首先分析该系统的特性,然后实验证明。
图5.磁悬浮隔振器的基本结构
图6.弹簧连接
图7.零功耗磁悬浮隔振器的基本结构
-
- 结合重量悬挂装置
如图5所示,隔振平台的全部重量由零功耗磁悬浮产生的磁力支撑。当隔振平台很大时,需要很多永久磁铁来平衡它的重量,这样会提高系统的成本。这里还有另外一个预料之中的问题,将系统运用到实际中时,因为混合磁铁只能产生吸引力,需要把感应装置在中间平台的下面(图5),这使得隔振结构相当复杂。
如图6所示,这个问题可以通过引入一个辅助悬浮物体解决,由辅助悬浮物支撑隔振平台的重量。在正刚度和负刚度弹簧系统中同时加入弹簧,总刚度变成
当方程(16)满足条件时,总刚度变成接近的任意值。
图7是提出的隔振系统的一种。阻尼为的弹簧嵌入在隔振平台和地面之间。在平衡状态下,弹簧提供向上的力。它减少了零功耗磁悬浮需要提供的静载荷力。此外,如图(8)所示,当向上的力大于重力时,零功耗磁悬浮需要必须产生向下的力从而使结构改进。由于感应装置安装在平台上面,结构比原来的图示所示的简单。应当注意的是,通过使用软弹簧可以隔离地面的振动。
-
分析
- 基本方程
图5所示模型是图7所示模型的一种特殊情况,级=0,=0。垂直方向的运动方程式为
其中x0,x1,x2分别是相对地面的位移,中间物体的位移和隔振平台的位移。代表电磁铁产生的电磁力,代表直接作用在隔振平台的干扰,代表弹簧最开始的压缩长度,代表弹簧最开始的压缩长度。混合弹簧的新引力大概表示为
其中表示在平衡状态下的新引力,应该满足如下方程:
这表明了弹簧产生的向上的力抵消了混合磁铁产生的稳态力。另外,当时,可以运用图8所示机构。
根据2.2章节的研究,实现零功耗的控制电流一般表示为
-
- 直接干扰的响应
为方便起见,假定初值都为零,通过方程(20)(24)(26),得到
其中
为了估计刚度的直接干扰,假定它是阶梯式的
当忽略地面的振动,平台的稳定位移为
因此,当
对于任意有限制,可以得到
方程式(38)表明隔振平台和地面之间的悬浮系统具有无穷大的静态刚度,这是因为即使存在对平台的阶梯式的干扰,稳定变差也是不存在的。通过中间物体的稳定位移和间隙的变化可以得到
通过方程(39)和(40)可以得到,当向下的力作用在平台上时,中间物体向下移动,间隙减小。这与章节3.2介绍的振动隔离系统吻合。
-
实验
- 实验设备和方法
图9和图10是原理图和建立的单轴装置图,用于原系统(图5)的实验性研究。没有配备图7和图8中的任何重量悬浮机构。高度,直径和质量分别是200毫米,226毫米,18千克。隔振平台和中间物体的重量分别为3.5千克和5千克,通过线性空气轴承引导,在垂直方向移动。对应图5的m1,环形电磁铁线圈匝数为448,它固定在中间物体上,电磁铁的内外直径分别为68毫米,138毫米。由Nd Fe B材料组成的10*10*5mm的永久磁铁提高偏置通量。这些磁铁,不包括电磁铁,都建立在隔振平台的反应装置。由于排斥力的存在,这种装置会加大操作范围。电磁铁和永久磁铁的标准间隙为3毫米。机械弹簧支撑着中间物体。为了方便调节,正刚度为k1、阻尼为c1的电磁铁安装在底座上,它的感应装置安装在中间物体上。如公式37所示,辅助电磁铁用于补偿正刚度和负刚度的振幅。在下面的实验中,中间物体相对基座的位移,隔振平台相对中间物体的位移,都是通过涡流间隙传感器检测的。
图9.实验设备原理图
图10.实验设备
在实验中,使用如下形式的零功耗控制器
这结合了PD(比例-微分)控制和电流局部反馈,方程41表明
他设计的控制算法是一个简单的数字控制算法。控制周期为100毫秒。在实际运用中,稳定的磁悬浮通过最初仅激活的PD控制实现的,随后,零功耗积分反馈被激活。在实现零功耗磁悬浮过程中,这个过程是有效的。反馈增益通过实验和误差调节。
-
-
实验结果
- 负刚度估算
-
实验结果
为了估算零功耗磁悬浮的负刚度值,当中间物体稳定时,测量它的位移特性;向下的力由放置在隔振平台的重物产生。图11是测量结果。为区分重物的重力产生的向下的位移,标记隔振平台向上的位移。正如图中所示,位移的方向与外力方向相反,所以刚度是负的。如图12,负刚度和外力是同一个量级的。负刚度值的估算是根据图11所测量的结果得来的。当向下的力增大时,电磁铁和反馈装置之间的间隙减小,导致间隙位移系数变大。其结果是负刚度的振幅也相应变大。但是,在后面的试验中假定它是不变的,即零功耗磁悬浮结合正刚度的悬挂装置。当力在0-9N时,常量系数平均值为14.3KN/m。
图11.零功耗磁悬浮的位移特性曲线
-
-
- 直接干扰响应
-
在第二个实验中,中间
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148003],资料为PDF文档或Word文档,PDF文档可免费转换为Word

