
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
蛇形机器人的路径点导航控制
摘要:本文研究了蛇形机器人的路径跟踪控制,并给出了两个贡献。第一个贡献是一个描述,关于直线路径跟踪控制器的作者如何在先前就提出扩展到路径以下的一般弯曲路径的概念。而本文的贡献是转向沿的路径点的直线连接来定义路径蛇形机器人一个路径点的指导策略。路径点指导战略建立在由作者所提出的直线路径跟踪控制器上。本文介绍了仿真结果,说明了所提出的指导策略的性能。
关键词:路径点 导航 控制 蛇形机器人
一.介绍
受生物蛇的启发,蛇形机器人承载的潜力,满足了在充满挑战的环境中人们日益增长的对于机器人流动性的需求。蛇形机器人由串联的模块组成,能够在一个或多个平面内弯曲。蛇形机器人自身较多的自由度使其很难被控制,但可以通过在特殊的环境中提供非流动性的轮式移动机器人、履带式和腿式机器人的方式解决问题。
关于蛇运动的研究已经进行了几十年。格林[ 1 ]在上世纪40年代进行实证分析研究了蛇的运动,希罗斯[ 2]研究了生物蛇和用发达的数学关系描述它们的运动,如serpenoid曲线。文献中的重点,主要是实现前进和转向运动。下一步不仅要实现向前运动,而且要使蛇形机器人沿着期望路径运动。这个控制问题报告的研究成果仍然有限。[ 3]一项关于路径跟踪控制器的轮式蛇形机器人(即非完整约束的链接)的工作提议,旨在使头部运动轨迹遵循参考轨迹。存在另一种相似的方法[ 4 ],在动态可操作性的测试中,需要考虑到轮子上的约束力量产生于路径控制器得结构。在[ 5 ]的研究结果认为跟踪蛇形机器人中一部分,但并非所有,链接被假定为轮式。这便给了系统更多的自由度和可利用遵循的轨迹,并同时保持了较高的可操作性。利用Poincareacute;图[ 6 ]研究沿直线路径运动时一个轮子的蛇形机器人的稳定性,并采用级联系统理论在[ 7 ]提出了一个路径控制器,K-指数稳定的蛇形机器人直线路径跟踪。
机器人鱼和鳗鱼的机制研究是相关的蛇形机器人的研究,因为这些机制是非常相似的。在[ 8 ] [ 10 ]–合成的平移和旋转运动的各种鱼的机制并提出控制器跟踪直线和曲线轨迹步态的作品。然而,一个分析恰恰证明了收敛到所需的路径仍然存在。
本文扩展了之前作品的作者在直线路径以下对于[ 7 ] 的介绍,并有两个贡献。第一个贡献是一个描述关于直线路径跟踪控制器是通过怎样的方法扩展到路径以下的一般弯曲路径的,这种方法在之前的[ 11 ]的上下文中解释了海洋船舶的路径跟踪控制。
本文的贡献是用转向沿航点的直线连接定义路径蛇形机器人一个航路点的指导策略。路径点指导战略建立在直线路径控制器上,在[ 7 ]提出以下,代表了蛇形机器人的运动控制操作友好的框架。本文介绍了仿真结果,并说明了所提出的指导策略的性能。
本文的结构如下。第二节提出了一个关于蛇形机器人仿真目的的复杂模型,而第三节提出了一个采用路径跟随控制器机器人的简化模型。在第四节中,用于直路径跟踪的控制器,而第五节介绍了直线路径跟踪控制器如何扩展到路径以下的一般弯曲路径。在第六节提出了路径点导向策略,第七节给出了模拟结果。最后,第八节提出总结意见。
二、平面蛇形机器人的复杂模型
本节总结了一个复杂的平面蛇机器人,先前在[ 6 ]提到的模型。我们将在第七节介绍使用这个模型来模拟蛇机器人的运动。
我们考虑到一个平面蛇形机器人有N个环节,并通过N-1个关节相互连接。机器人的运动学定义如图1所示的符号。所有环节有惯性相同的质量和力矩。机器人的总质量因此是Nm。每个环节的质量是均匀分布的,使链路的CM(质量中心)位于其中心点。在水平平面的蛇形机器人的行动和有N 2个自由度。在CM的位置(重心)的机器人是用。链接绝对角表示为相对地球仪的X轴逆时针方向表达阳性。如图1可见,链接i和链接i 1(即联合i角)之间的关系是由决定的。每个环节都受到各向异性粘性地面的摩擦力。由于摩擦是各向异性的,互相联系的两个粘性摩擦系数和,分别描述链接的切线和法线两个方向的摩擦力。
图一
[ 6 ]表明,蛇形机器人关节角度的运动方程,,头部链接的绝对角度,,对蛇形机器人重心的位置,,关节力矩,,可以写成
。
是状态向量的函数和关节力矩,和分别是粘性摩擦力在球形X方向和链接Y方向。
三、平面蛇形机器人的简化模型
本节总结了一个平面蛇形机器人的简化的模型是建立在第四节的直线路径跟踪控制器上的。更详细的演示模型,可以参考[ 12 ]。
A.模型概述
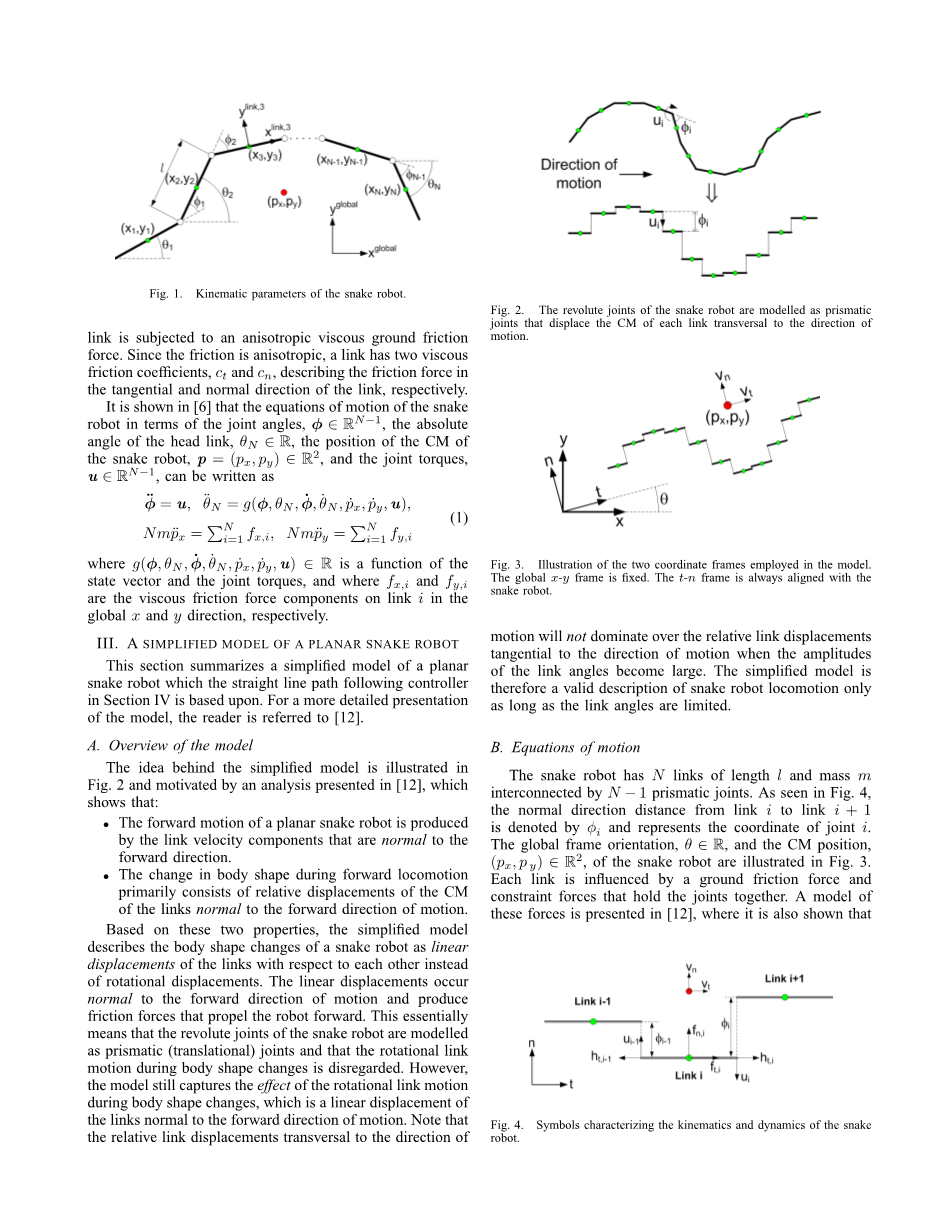
简化模型的涵义如图2所示,由[(12)]所给出的分析所引出,这表明:
平面蛇形机器人向前运动的速度由正方向上的连杆速度分量产生。
向前运动的机身形状变化主要由正常的链接重心相对位移造成的。
图二
基于这两个属性,简化模型将蛇形机器人的身体形状变化描述为链接相对于彼此的线性位移,而不是旋转位移。线性位移发生在正常的向前运动的方向上,并产生摩擦力以推动机器人前进。这实际上意味着,蛇形机器人的旋转接头为棱柱(平移)关节,身体形状的变化在转动连杆被忽略。然而,该模型仍然捕捉到身体形状的变化,变化为链接在做正常的前进运动时的一个直线位移。注意,相对链路位移的横向运动方向在不占主导地位的相对位移方向运动时,链路的角度变大。因此,简化的模型能有效地描述蛇形机器人的运动,只要链接角度在范围内。
图三
B.运动方程
蛇形机器人的N个链接的长度为l,质量为m并由Nminus;1个棱柱关节相连。如图4所示,从链路i到i 1法线方向的距离用表示,也表示为i个环节的整合。三维坐标定位,、重心的位置、,蛇形机器人如图3所示。一个环节都受到地面摩擦力和约束力共同作用。这些力的一个模型在展示在[12]中,其中也表述了一个完整的蛇形机器人的数学模型,模型为:
其中,是环节的整合,是共同的速度,是重心位置,是接头的速度,是角速度,是机器蛇的切向和法向方向的速度,驱动力,并且公式 其中、。参数和为正标量的摩擦系数,用于对蛇形机器人的外部表征。特别地,系数确定摩擦力抵抗连杆运动的幅度,决定引起的摩擦力推动蛇形机器人前进的幅度,确定摩擦力矩相反的蛇形机器人的旋转,而确定引起扭矩旋转蛇形机器人。此转矩诱导时,法向速度和关节坐标的平均值是非零。每个系数的作用更详细地解释在[ 12 ]中给出。
图四
四、沿直线路径的跟踪控制
本节将介绍直线路径跟踪控制器蛇形机器人,早在[ 7 ]中便已经提出这种概念。路径点导航策略也是基于这种控制器并在第六部分作出解释。
A.控制对象
控制目标是使蛇形机器人在其收敛和随后的轨道直线路径运动的同时保持与方向平行的路径。为此,我们定义三维坐标系,其x轴所需的直线路径对齐。在三维坐标系y轴中,,是机器人距离理想路径最近的,蛇形机器人的位置确定,,是机器人在理想路径上运动的角度。控制问题,通过设计一个反馈控制律例如以下控制公式达到目的:
路径导航蛇形机器人,它的意义在于集中所有的控制的成果使其尽量收敛到路径,随后沿着路径以一定的速度前进。作者认为,重要的是要准确控制机器人的前进速度。依照作者在其作品[ 13 ],阐述了在横向波动振荡的情况下蛇形机器人会以一定的平均速度的前进,我们选择基地的路径跟踪控制器作出以下假设:
假设1 :蛇形机器人进行横向波动时,存在一个速度始终是非零的并且速度较大。例如:
,其中。
B.转换模型
如(2F)和(2h),关节坐标phi;在两者的角速度和蛇形机器人的横向速度。这是种复杂的控制器的设计,因为机身形状的变化会影响前进和机器人的横向运动。[ 14 ]中讲到,因此我们将phi;效果在横向速度的坐标下变换:
其中恒定参数被定义为
坐标变换(4)如图5所示,可以被解释为移动点,它决定了蛇形机器人的位置到机器人的形体变化产生纯旋转运动和没有侧向力的位置。新的坐标(4)将模型(2)转化为
其中,和被假定为1.
C.路径跟踪控制器
蛇形机器人的路径跟踪控制器由两个主要组成部分。第一部分是步态控制器,使蛇形机器人根据步态模式产生横向波动(如假设1说明)。第二部分是航向控制器,使蛇形机器人目前沿期望路径并在随后向着现在的路径运动。那么现在的跟踪控制器就有两个组件。
- 步态控制器:[ 2 ]提出,横向波动是通过蛇形机器人的控制关节根据正弦参考
其中和是振幅和频率,分别决定正弦关节运动和关节之间的相移。参数是联合偏移坐标,我们将使用它来控制运动的方向。为了使节点跟踪关节可以参考(7)的坐标系,我们将按线性控制律
来设定执行力。其中是一个新设立的控制输入。该控制律将关节动力学(6d)化简为。随后,我们选择新的控制输入,定义为:
其中,和是标量控制增益。是由(7)得出的关节参考坐标系。
- 航向控制器:为了使蛇形机器人朝理想的直线路径,我们采用视线(LOS)制导律
其中 是交叉跟踪误差;是设计参数被称为前瞻距离决定的收敛到期望的路径。如图所示在图5的右侧,视线角编号对应着,蛇形机器人朝着与其理想路径误差∆方向的点移动时的方向。为了依照由(10)所给的视线制导律控制前进的角度,我们选择联合偏移作为
(见[ 7 ]进行了详细的推导).其中是一个标量增益控制器。
请注意,在模型(11)中的逆向运动速度并没有错,因为由假设1可得。
完整的路径跟踪控制器,其结构总结如图6,满足以下定理:
定理2:依照平面蛇机器人所描述的模型(6)并认为假设1正确。如果视线制导律的参数∆是依照(10)选择的,例如:
,路径跟踪控制器被(7)、(8)、(9)、(10)和(11)保证能够完成(3)实现任何满足初始条件的控制目的。
图五
证明:定理证明[ 7 ]使用级联系统理论,不包括空间限制。
注3:在第三级甲等解释中,简化模型的基本假设是唯一有效的。只要链接角度的方向是有限的。定理2中的稳定性结果,是由于称为蛇形机器人按有限的链路角度进行横向波动。
- 沿曲线路径跟踪控制
在这一节中,我们将介绍如何使在前面的部分中提出的直线路径跟踪控制器可以扩展到路径以下的一般弯曲路径。在[ 11 ]提到了类似船舶航行路径跟踪控制的控制器。在本文中,我们将展示如何用[ 11 ]的方法修改弯曲路径跟踪控制蛇形机器人,并涉及到蛇形机器人模型和在[ 11 ]中的船舶模型之间的一些差异;并尽可能地适应控制器的发展。
蛇形机器人应该遵循的理想路径是由C表示的连续可微曲线(见图7)。背后的理念引导蛇机器人的控制器对一个虚拟粒子沿着路径移动。粒子沿着曲线运动的距离用s表示,这意味着s是粒子延曲线运动的瞬时速度。另外,此外,我们定义一个移动坐标系与轴并用T和N表示,这样,结构就伴随着粒子而诞生并且T轴就总是曲线的切线。这叫做Serret-Frenet坐标系[15]。作为显示在图7中,T轴与三维坐标x轴的夹角表示为,蛇机器人在T-N框架中的位置表示为。
因为我们的目的是使机器人的运动收敛于并且其运动沿着期望路径C.我们规定控制的目的为
图六
为了完成这个控制目的,我们依照引导定律
来控制机器人前进的方向,并且根据
更新虚拟粒子沿曲线运动位置。
图七
并且我们假定机器人前进的最小速度为,最大的加速度为沿路径的最大曲率为,能预测距离满足条件
其中为一个确定的常数,,v是一个可变常数,范围是。需要注意得是,因为模型的差异所以(16)的情况和(11)略有不同。上述控制器都满足下面的定理:
定理4:思考模型(6)中的平面蛇形机器人,认为假设1成立,并且依据(7)、(8)、(9)和(11)机器人的关节可以被控制,其中源于(14),s是由(15)推算出来的。(13)的控制目标是,在条件(16)成立的条件下,任何一组的初始条件都会满足。
证明:这个定理的证明是遵循相似的步骤(11)中给出的证明并且不包括空间限制。
- 路标指引控制
在本节中,我们使用直线路径跟踪控制器在第四节以提出一个指导战略转向一条蛇机器人之间的一组参考位置,或锚点的环境机器人。提出了路标的指导策略部分代表了一个操作简便的框架蛇机器人的控制。
A:方法描述
未来的应用程序通常会涉及到蛇机器人运动具有挑战性的和非结构化的环境中。其目的是促使传感器和或一个或多个的工具到达指定的目标位置(s)。在这些情况下,准确的路径会使机器人走向目标(s)通常是不那么令人感兴趣的,只要保证机器人在规
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141852],资料为PDF文档或Word文档,PDF文档可免费转换为Word

