英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
行星式钻井和取芯试验台钻井状态监测的方法和设计
唐俊越,江生元,陈翀斌,全齐泉,袁凤佩,邓宗泉
摘要:钻井取芯在机器人行星探测中获取土壤样品时已经成为一种有效的选择。为了避免严重的过载故障,应该在线监控钻井状态,并在合理范围内进行调整。于此,中国月球探测任务中采用了一种新颖的软管取芯方法(FTC)。为了验证提出的FTC方法,并获得能够在线控制的有用钻井状态,因此开发了一个行星钻井取芯试验台(PDCT)。通过应用一台相机计算去除岩屑的体积,同时利用超声波传感器进入中空螺旋监测取芯土壤状态,来准确获取月壤的流动状态。此外,钻井负荷由安装在土壤容器底部的F / T传感器获得。在一个典型的月壤模拟实验中表明, PDCT的设计能够用于优化钻头工具结构和控制策略的地面试验。
I.引言
从行星获取土壤样品是一种寻找外星生命有机体证据的有效方法。由于高效渗透和切割拆除特性,钻孔取芯已广泛应用于自动行星探测【1】,【2】。行星采样的控制架构通常包括地球上的遥控和行星上的自主钻探。只有发生严重的钻井故障,遥控模式才会切换到地面上的专家进行钻井过程。除此以外,抽样钻头一般会自动进行。
在地面钻探中,检测装置通常用于在钻井开始之前获取准确的地质信息【3】。然而,在大多数机器人行星采样任务中,采样点没有足够的当前地质信息来指导钻井控制。由于行星风化层的力学性能,如内摩擦角、内聚力等在粒状土与硬岩之间有很大差异【4】【5】,钻孔状态,如钻头重量、旋转扭矩、取芯比等,可能是非常不可预测的,严重影响钻井稳定性和取芯结果。因此,为了减少渗透的潜在风险,应在线监测钻井状态,并进行合理调整。为了解决上述问题,研究人员正在努力寻找有效的解决方案。
在阿波罗11号任务之后,Luna16是人类行星探测历史上第一台机器人月球钻探和取芯装置,只有101克取样的月球土壤返回地球【6】。通过用机械弹簧监测钻井载荷,采样钻最终在遇到硬岩之前渗透到近35厘米的深度,接下来的Luna24采用了相同的钻井状态监测方法,并配有提高钻井效率的冲击机构【7】。一旦穿透力超过阈值,冲击机构将被激活。为了保护钻具免受过载,NASA与蜜蜂机器人技术公司一起开发了一系列自动化钻井平台【8】【9】【10】。通过使用两台外部激光多普勒振动计(LDV)检测螺旋钻的振动状态并调整相应的恢复策略,这些开发平台减轻了六种类型的过载故障。
除了钻井载荷外,还应在采样任务中监测取芯土壤的状态,以在有限的钻孔深度下实现高取芯比。在这里,中国的月球探测任务采用了一种新型的柔性管取芯(FTC)方法【11】。为了验证提出的取芯方法和监测关键钻井状态,开发了行星钻孔和取芯试验台(PDCT)。通过用相机计算去除的切屑的体积,可以准确地获取去除的土壤的流动状态。为了理解取芯过程,将超声波传感器布置在中空螺旋钻中,以监测钻孔过程中的取芯土壤。此外,在月球土壤容器的底部安装了一个F / T传感器,获得钻头和旋转扭矩的重量。最后,一个典型的月球仿真模拟实验表明,PDCT可以很好地在线监测钻井状态,可用于优化钻具结构和钻井策略的下一步工作。
本文的其余部分安排如下。首先讨论了柔性管取心方法及其面临的挑战。进而阐述了PDCT的发展,包含机械系统和钻井状态监控系统。最后,有效地获取了一种在典型的土壤模拟物环境下的钻井状态,包含钻井载荷、移除的切屑体积和取芯比。
II.柔性管道原理
与地面钻井任务不同,行星钻井取芯,特别是在自动取样和回收任务中,需要更好地保留穿刺过程中的行星风化层的分层。否则,采样土壤的地质信息可能无法完全保存,显着降低了其进一步的地质价值。因此,对于即将到来的行星探索,迫切需要一种新颖的取芯方法来应对这一挑战,获取样本而不改变其分层。
A.柔性管取芯(FTC)
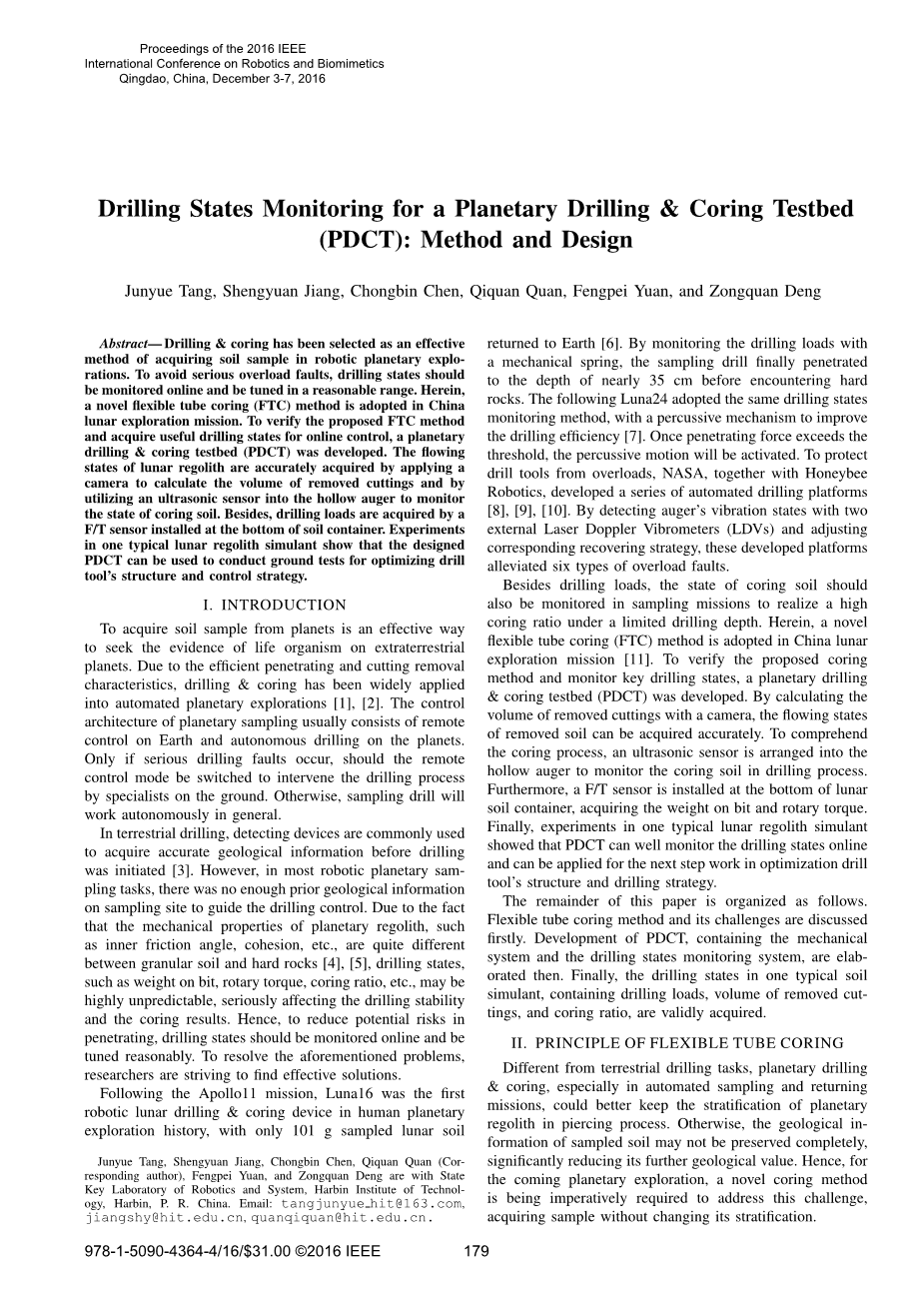
目前,中国正在执行月球探测计划,即嫦娥计划,其第三期将采用具有柔性管取芯(FTC)机制的空心钻机,捕获大约两米深的月球土壤,并将其回到地球【12】。在钻井过程中,钻具由旋转冲击式驱动机构和穿透机构驱动,以穿透进入钻石。在螺旋钻里面,有一个精心设计的FTC机制,如图1所示。旋转螺旋钻内有一组取芯管,包括固定管和柔性管,柔性管布置在螺旋钻和保持管之间,柔性管的一个尖端是密封机构,另一个尖端固定在连接部件上,与牵引线连接。
图1 灵活管取芯方案
一旦钻头在穿透速度vp下接触行星表面,则牵引线将被固定在探针上的一个点上,并且在采样过程中保持紧张状态,保持管与螺旋钻同步向下移动,但不会旋转【12】.当钻进高压釜时,柔性管开始以卷绕速度vw包裹样品,由于柔性管与芯之间没有相对的运动,因此这种FTC方法可以保持原始的行星土分层。当达到所需的钻孔深度时,柔性管末端的密封尖端将被启动,以将土壤样品收集到封闭空间中。最后,填充土芯的柔性管将通过缠绕和传送机构从中空螺旋钻中拉出。
B.FTC方法中的难关
采用FTC方法带来了很大的好处,特别是在保持层次分层的同时,还有很多挑战要解决,一般来说,这些挑战可分为两个方面:钻井挑战和取芯挑战。由于中国正在进行一个月球探测项目,本文的重点将集中在月球采样的挑战。
- 钻井挑战:由于保持管在取样过程中向下移动,所以在保持管和柔性管之间肯定存在相对的摩擦,当取芯土壤开始被包裹到柔性管中时,摩擦状态将被改变,这可能导致增加的拖曳力。此外,此外,考虑到柔性管和螺旋钻之间的窄环形区域,柔性管被旋转螺旋钻刮擦的可能性高,影响旋转扭矩。此外,由于月球石主要由五个部分组成:岩屑,矿物碎片,角砾岩,凝集物和玻璃粘结骨料[4],取芯土壤可能因地而异,取决于源岩的矿物学。因此,沿长度方向的退化分布存在较高的不确定性,可能导致钻井载荷的严重波动。
- 取芯挑战:在线调整适合的钻孔参数是提高钻具适应不确定环境的极好方法【7】,根据反馈状态,可以通过采用合适的钻孔参数来减少钻井载荷。然而,取芯土壤的体积可能同时受到钻井参数的影响。由于月球钻井和取芯任务的目标是尽可能多地获取月球土壤,因此应考虑钻井载荷和取芯土体积。而取芯土壤被包裹在FTC中的柔性管中,在不影响取芯结果的情况下在线测量取心土是相当困难的。
总体而言,为避免不确定的过载钻井故障,增大取芯土体积,必须对整个钻井过程中的关键钻井状态进行监测,并优化钻井参数。
III. 行星钻井取芯试验台的发展
为了验证提出的FTC方法并获得钻井和取芯建模的有用钻井状态,首先应在地面试验平台上进行大量的钻井实验。根据月球探测方案,本文开发了行星钻孔取芯试验台(PDCT)。本文详细讨论了PDCT机械系统和钻井状态监测系统的工作原理。
- PDCT的工作原理
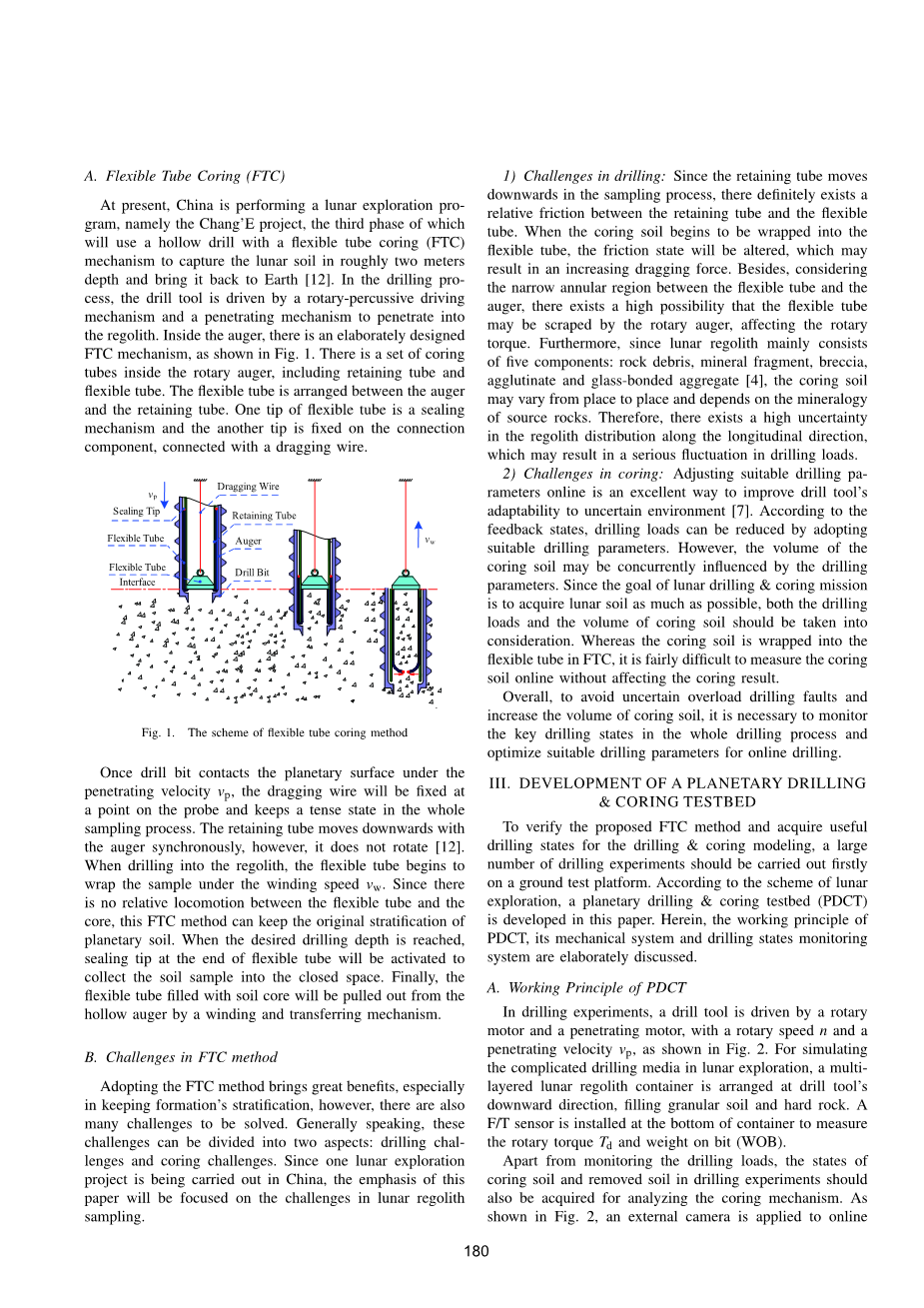
在钻井实验中,钻具由旋转马达和穿透马达驱动,旋转速度n和穿透速度vp,如图2所示。为了模拟月球探测中的复杂钻孔介质,在钻具向下的方向上设置了多层月球沉积容器,填充颗粒状土壤和硬岩,F / T传感器安装在容器底部,测量旋转扭矩Td和重量(WOB)。
除了监测钻井负荷外,还应获取钻井实验中的取芯土和去除土壤的状态,以分析取芯机理。如图2所示外部摄像机应用于在线计算去除土壤Vr的体积,可作为相互作用的土壤流动状态的良好基础。此外,非接触式超声波位移传感器精细地布置在中空柔性管中,以测量在一定钻孔深度Hd下的取芯比Kc,该深度Hd由安装在衬管引导件上的线导磁栅尺取得。在钻孔过程中,柔性管和超声波位移传感器都固定在PDCT的床架上的一个点上.。除机械系统外,所有上述钻井状态清单均导入控制器,为操作者提供监控功能。
图2 PDCT设计的工作原理
- 机械系统
- 驱动机制:钻机由旋转机构和穿透机构驱动,如图3所示。具有7:1减速器的交流旋转电机通过一对正齿轮向钻具提供旋转扭矩。考虑到月球岩包含颗粒土和硬岩,旋转速度和旋转力矩不应太小,否则,钻具可能会在不合适的钻孔参数下卡住。这里,具有60:54的外部减速器的旋转马达(510W)可以以520r / min的额定转速驱动钻具,输出旋转扭矩为8.3Nm,如等式 1。
(1)
其中Td是螺旋钻的驱动扭矩,Tm是旋转电机的额定转矩,irm是减速机的减速比,irg是正齿轮的减速比,nr是旋转电机的转速,eta;r是传动效率。
穿透运动通过穿透电机实现。 具有4060:1齿轮箱的该直流电动机(10W)与一对正齿轮(2:1)和具有引导线的链条机构连接以实现线路运动,如图3(b)所示。在钻井实验中,穿透速度由穿透电机驱动器控制。为了模拟月球上的低重力,整个驱动机构和钻具的重力通过设计重量的拖动作用补偿到其重力的1/6。最大穿透速度和穿透力分别为100 mm / min和375 N,如方程式 2。
(a)旋转驱动机构 (b)穿透驱动机构
其中zc是链轮上的齿数,pc是链的间距,ipm是穿透马达的减速机的减速比,ipg是正齿轮的减速比,Tp是穿透电机的额定转矩,eta;p是齿轮减速器的效率,dc是链轮的直径。总体而言,设计的PDCT的具体钻孔参数如表1所示,这是实验中选定的钻孔参数范围。
表1
钻孔参数在PDCT设计中的参数范围
- 取芯钻具:设计的取心钻具由钻头,中空螺旋钻,两个保持管,聚四氟乙烯(PTFE)环和柔性管组成,如图4所示。在本文中,设计了具有主辅助切割刀片的双螺旋取芯钻具。为提高螺旋输送效率,采用双螺旋螺旋槽。有四个碳化钨切割刀片,两个主切割刀片和另外两个辅助切割刀片,所有刀片都焊接到钻头矩阵。
图4 设计的双螺旋取芯钻具
与具有内切削刃和外切削刃的主切刀不同,辅助刀片仅具有内切削刃,并且被设计成帮助主刀片保持取芯土,并防止钻头基体在钻孔过程中划伤。考虑到切屑的去除效果和钻头应力情况,采用直接焊接模式安装具有0°前角的四个切割刀片。主切割刀片的前刀面与螺旋槽的出口精细对齐,确保切屑流畅。
为了防止柔性管被旋转螺旋钻刮掉,在设计中采用了两个固定管,外保持管通过梯形螺纹连接到用柔性管报废的内保持管。为了校准柔性管和钻头之间的同轴度误差,提高了取芯效果,在钻头的内表面布置了PTFE环,并具有小的过盈配合。前钻井实验表明,该钻芯钻具具有良好的切割和输送性能,可以实现稳定的取芯效果。
- 模拟容器:由于月球岩石的力学性能沿纵向变化,因此必须制备模拟真实月壤的多层土模拟物,组合式模拟容器设计如图5所示。 两个容器通过螺栓和螺母连接,并安装在床架上。在模拟物的制备中,将少量的土壤模拟物倒入容器中,并通过将容器放在具有土壤上的质量的振动台上而被压缩。经过几个振动圈,月球土壤模拟物的相对密度可以沿纵向变化。
图5 钻井负荷监测方案
考虑到可能的月球岩石,这种组合容器可以容易地用于将岩石模拟物放入容器中。 因此,该设计的容器可用于制备用于实验的多层模拟物。
- 钻井状态监测系统
- 钻井负荷监测:钻井过程中的钻井载荷是从钻具和土壤之间的相互作用产生的,主要涉及旋转扭矩Td,钻头重量,钻头功率Pd和钻井能量Wd,如等式3所示。
其中t是钻井时间。 根据牛顿第三定律,钻具所遭受的钻井负荷等于土壤所受的力。 在这里,监测从土壤持续的钻井负荷。 如图5所示,可以在容器下安装一个能够测量60 Nm扭矩和1700 N垂直力的F / T传感器。除了TD和钻压、转速n和渗透速度VP也分别由旋转电机和线导磁栅尺获得。
- 流动状态监测:在FTC方法中,有三种类型的土壤产生:积累土壤,螺旋槽中的土壤和柔性管中的取芯土壤【13】。由于凹槽中的土壤处于密闭空间,因此其流动状态可能无法精确测量。 如图6所示采用非接触式测量方法对螺旋槽中软管和土壤中的取心土进行了监测。
图6 流态监测方案
在PDCT中,将柔性管中的超声波位移传感器设置在40mm到240mm之间。 由于柔性管的直径略小于保持管的直径,所以在保持管内部的柔性管上存在折叠效应。为了防止折叠影响超声波传感器的输出,设计保护管安装在传感器的输出侧,保护管的内径设计用于确保产生的声波不会受到测量的影响。在钻孔过程中,超声波传感器通过夹紧支撑杆而固定在床架上。 通常来说,取芯效应可以通过取芯比指数Kc来评估,如等式 4。
其中Hs是取芯的高度,Hu0是超声波传感器的初始值,Hu是超声波传感器的在线值。 根据方程式的定义 4,取芯比Kc分别为0%至100%,代表空取芯和全取芯。
为了获得螺旋钻外部积聚土的流动状态,将工业摄像机放置在高度调节装置上,该装置与固定在床架上的支撑杆连接,如图6所示。为了提高图像的质量,两个条形LED布置在相机的上方。通过在线获取积累土壤的图像并将图像转换为二值图像,可以获得积累土壤的轮廓。之后,可以准确计算去除的土壤Vr的体积。 总体而言,已经开发了所提出的行星钻孔取芯试验台的机械系统和钻井状态监测系统。 PDCT的3D模型如图7所示。
图7 PDCT设计的3D模型
IV.月壤模拟物下的钻井实验
一旦开发了行星钻孔和取芯试验台,就需要进行各种钻井实验来验证提出的FTC方法和钻井状态监测方法。 这里,在验证实验中,在钻孔参数的一个合适的组合下获得所有的钻井载荷分段,取芯比和移除的切屑的体积。
- 月球的月壤模拟物
一种棕色火山灰被选为理想的原料。在几个压实圈之后,原始土壤被刻意压缩,沿着
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[136928],资料为PDF文档或Word文档,PDF文档可免费转换为Word

