
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
主动人体工程学旨在通过早期发现和减少工作中的风险因素来预防与工作相关的肌肉骨骼疾病(WMSD),例如笨拙的姿势和过度的用力。如今,数字人体建模(DHM)工具通过在设计阶段对工作任务和工作场所进行虚拟模拟来支持主动人体工程学(Longo和Monteil,2011; Spada等,2017; Summerskill等,2016; Van Houcke等。 ,2017)。这些工具集成了多种分析,例如可达性,可见性,清除和人体工程学风险评估等,以评估各种工作场所的替代方案。这些分析的目的是优化工作场所并降低WMSD的风险,例如由于姿势笨拙和过度用力造成的风险。为了这个最后的目标,人口强度能力的知识对于降低由于过度劳累而导致的风险至关重要(Lin et al。,2013),该领域正在进行的研究也证明了这一点(Eks ioglu,2016; Plewa等,2016; Thompson)等人,2015)。同样,DHM工具能够正确地模拟不同工作场所布局中的施力能力,即考虑工作中的变化,这一点至关重要。
位置和运动方向,以适当优化主动人体工程学的工作场所布局(La Delfa和Potvin,2017)。
可以有两种方法来比较DHM工具中替代工作场所布局的可接受性:经验统计建模和肌肉骨骼建模。先验包括众所周知的软件程序,如3DSSPP和Jack,并利用静态强度模型(Chaffin等,2006)来评估由于工作任务请求引起的反应体关节力矩。将这些关节时刻与经验人口强度数据库进行比较,以估计能够执行任务的人口百分位数。具有百分位数的能力被广泛用于比较替代布局中的工作任务需求(Bertoloni等人,2012; Tripathi等人,2015; Zhang等人,2013)。后一种方法,即肌肉骨骼建模,由AnyBody Modeling Systems(AMS)等软件组成,使用数学建模技术来模拟人类肌肉骨骼结构中的各种肌肉和骨骼。肌肉被建模为收缩力生成元素,而骨骼则是刚性元素。模型中的每个肌肉都根据其大小分配强度,并且其对执行工作任务的贡献由逆动力学分析中的优化问题的解决方案确定(Damsgaard等人,2006)。肌肉贡献与其相应强度之间的比率,即肌肉激活水平,已被用于比较替代工作场所布局的可接受性(Pontonnier等,2014; Xu等,2016)。模型中的每个肌肉都根据其大小分配强度,并且其对执行工作任务的贡献由逆动力学分析中的优化问题的解决方案确定(Damsgaard等人,2006)。肌肉贡献与其相应强度之间的比率,即肌肉激活水平,已被用于比较替代工作场所布局的可接受性(Pontonnier等,2014; Xu等,2016)。模型中的每个肌肉都根据其大小分配强度,并且其对执行工作任务的贡献由逆动力学分析中的优化问题的解决方案确定(Damsgaard等人,2006)。肌肉贡献与其相应强度之间的比率,即肌肉激活水平,已被用于比较替代工作场所布局的可接受性(Pontonnier等,2014; Xu等,2016)。
经验统计和肌肉骨骼建模方法之间存在明显的差异,以估计数字人的力量。经验统计模型的可靠性在很大程度上取决于经验观察的广度,因为在工作场所可以观察到各种工作条件。因此,基于经验统计模型的DHM工具的一个关键问题是它们如何将强度外推到不属于观察集的条件。另一方面,基于肌肉骨骼模型的DHM工具应该能够解释工作条件中的这种多样性,如果它们代表人类肌肉骨骼结构的详细和更现实的模型。肌肉骨骼模型的关键方面是肌肉模型的准确性和给定任务中肌肉的正确使用。人体由比执行任务所需的肌肉更多的肌肉组成。因此,基本上该模型正确地模拟由中枢神经系统(CNS)选择的标准,以决定各种肌肉的执行以执行给定任务。
在这项工作中,我们尝试评估AMS作为工作场所优化工具的可用性。用于工作场所优化的主动工具的效用将取决于预测的力施加能力的准确性,将人体模型设置成期望姿势的便利性以及表示不同人口百分位数的强度的缩放。这项工作的目的是作为第一步,通过AMS研究在不同工作点确定有利的力量运动方向的可靠性,以支持虚拟工作场所优化。换句话说,我们想验证AMS的人体模型是否能够可靠地解释由于工作位置和运动方向的变化导致的人力消耗能力的变化。我们将使用手上的等长强度作为力量运动能力的量度,因为现有大量文献和模拟的简易性。使用AMS模拟等长力消耗的现有工作集中在单向运动上。巴萨尼等人。(2017年)和Rajaee等人。(2015)模拟提升载荷,以比较预测的腰椎椎间盘内压力与体内测量值。Duprey等人。(2015)在软管插入任务期间模拟手部的内侧力。Oomen等。(2015)根据膝伸展强度制定了强度缩放规则,并使用此规则验证了模拟腿压力。虽然AMS在这些特定应用中表现出良好的效果,
对于其作为工作场所优化工具的用途,如果AMS的人类模型能够代表人口样本将是有用的。人口样本的使用很重要,因为人体工程学家通常将任务要求与人口的能力进行比较,以估计WMSD的风险(La Delfa和Potvin,2017)。因此,我们将使用人口样本的平均强度,人体测量和姿势数据作为模拟的参考。对人口强度进行建模的方法不同于对个体力量建模的建模,这需要详细的主题特定数据,超出通常的人体测量变量(Oomen等,2015)。因此,本研究的目的是评估AMS人体模型评估的工作空间中的多向力量施加能力,
由于这项工作侧重于工作空间中AMS的等长强度评估,因此获得详细的知识并重现受试者的姿势以减少
由于姿势不平等导致的力量变化。我们搜索了文献中现有的强度数据库,以作为模拟的参考。然而,若干多向强度数据库缺乏特定的姿势信息,例如试验期间受试者所承担的关节角度。La Delfa和Potvin(2016),Roman-Liu和Tokarski(2005)以及La Delfa(2011)的硕士论文提供了具有明确的姿势信息的强度数据库。Roman-Liu和Tokarski(2005)测量了内旋和旋后的夹持,提升和推力以及扭矩。与(La Delfa和Potvin,2016)和La Delfa(2011)相比,这是一组有限的努力,两者都在八个手部位置测量了26个方向的力量。在这两部作品之间,La Delfa(2011)有一个更广泛的姿势数据库,包括所有测试条件(8个手部位置* 26个方向 208),仅通过平均受试者的关节角度。相反,La Delfa和Potvin(2016)仅在八个手部位置提供相同的关节角度,平均每个手部位置的主体和运动方向。此外,受试者在La Delfa(2011)的力量测试期间站立。然而,在La Delfa和Potvin(2016)中,受试者在试验期间就座。座椅的使用将允许受试者将自己支撑在座椅的附加表面上,从而在有利于这种支撑的方向上增强强度。模拟这种相互作用会在模拟结果中引入额外的不确定性。所以,La Delfa(2011)被选为参考数据库。该数据库提供了在AMS中开发模拟的必要信息。本节提供了这些实验的主要方面的摘要。有关详细信息,请参阅La Delfa(2011)的原始作品。
招募了17名右手女性受试者进行实验,要求他们使用右手以站立姿势施加最大等长力,同时在锻炼期间使用他们的左手支撑和支撑自己。这些受试者的平均身高为167.7厘米(标准差6.8),平均体重为62.5千克(标准差10.9),平均年龄为24岁(标准差为1.8)。
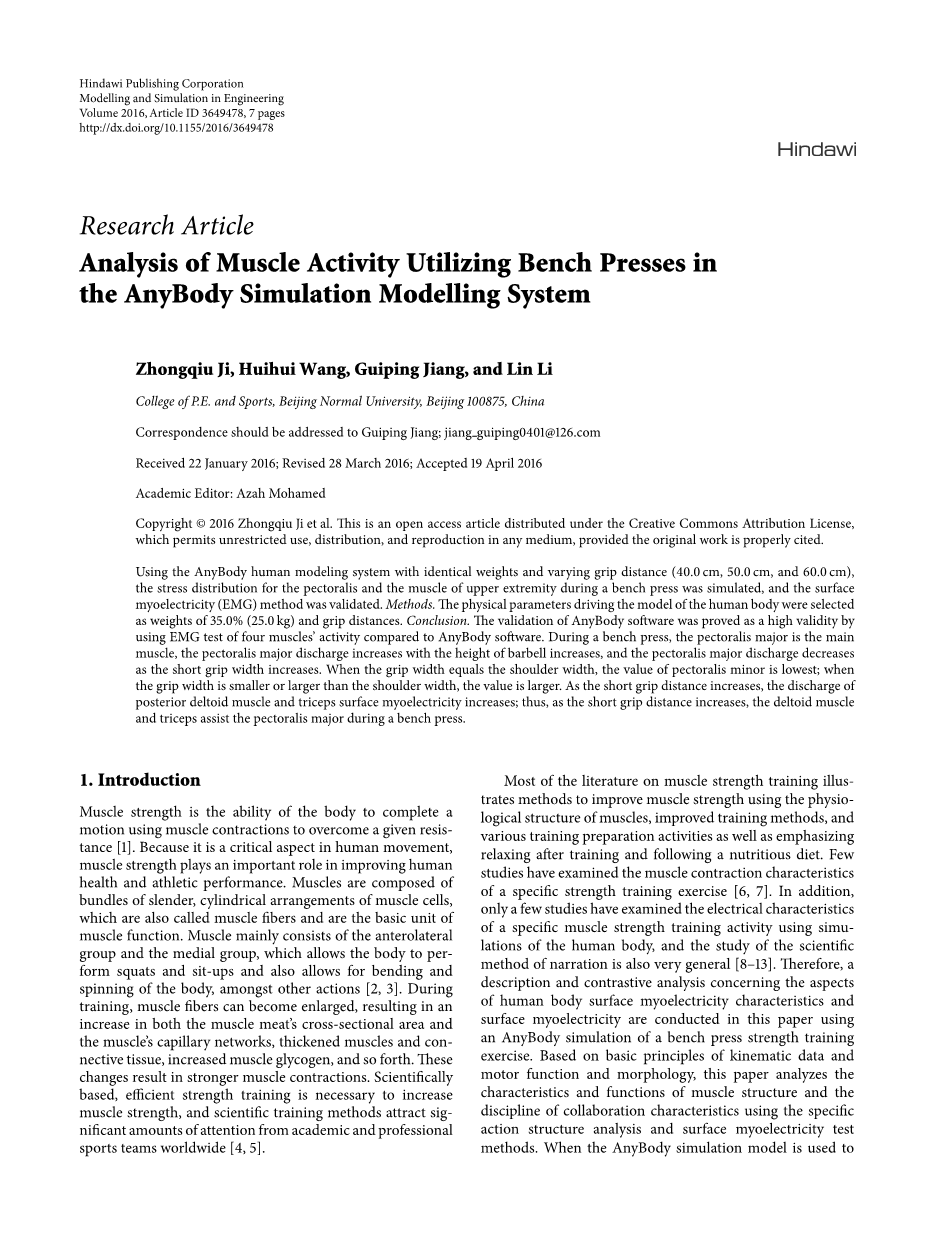
使用手相对于身体的高度和水平手角来定义这些实验中的八个手位置(图1a)。考虑到各自的人体测量学,手部高度(头顶,肩部和脐部)是针对每个受试者唯一定义的。水平手角(0°,45°和90°)是穿过手和肩部的垂直平面穿过肩部的矢状平面的角度。在实验中使用的八个手部位置是头顶0,头顶45,肩部0,肩部45,肩部90,脐部0,脐部45和脐部90.手部位置的第三个坐标,即手部距离肩膀,被定义为最大手臂伸展的80%。
在每个手部位置,受试者在26个方向上施加力。这26个方向被分类为一维(1D),二维(2D)或三维(3D)。一维方向是六个主要方向(上部,下部,前部,后部,内侧和外侧)。2D和3D方向分别是这些1D方向中的两个或三个的组合(La Delfa和Potvin,2016)。我们在这项工作中采用了与施力方向相同的命名约定,如图1b所示。
使用安装有垂直定向手柄的三轴测力传感器测量受试者的力或手臂力量(MAS)。在此期间向受试者提供了实时反馈
图1. a)手部位置的图示和b)力的运动方向的命名惯例(从La Delfa和Potvin(2016)采用)。实线代表六个主要的一维方向。虚线(Po / La)和点线(Su / An / Me)线分别是2D和3D方向的示例。使用相应的1D方向的前两个字母(上部,下部,前部,后部,侧部和内侧)报告方向。
使他们能够监测和控制力量施加矢量的实验。使用光学运动捕获系统记录受试者的姿势,并且在数据库中提供右上肢的三个关节角度。这些是水平和垂直肩角,以及肘关节屈曲角度。水平肩角定义为上臂在水平面上形成的角度,使得角度0意味着上臂横向外展,而角度90意味着上臂向前弯曲。垂直肩角定义为上臂与穿过肩部的垂直线对接的角度。
Damsgaard等人提供了AMS的详细综述。(2006年)。虽然AMS本身是一个建模软件,但它的开发人员也使用该软件构建了一个人体模型。肌肉,骨骼及其相应连接位置的尺寸是开发数学模型所需的一些基本数据,它来自尸体研究。AnyBody Managed Model Repository(AMMR)提供了这个人体模型及其文档和一些起始模板,它与AMS一起提供。AMS使用逆动力学分析来计算基于已知运动学和外部的内部身体力
对身体的力量。AMS的常见用法是从一个可用模板开始,并进一步开发以模拟用户的应用程序。
AMS版本6.0.7用于开发实验的静态模拟。AMMR版本1.6.5的Human Standing模板进一步开发,以模拟每次试验的平均姿势。使用长度 - 质量 - 脂肪比例定律将人体模型缩放至17名受试者的平均身高和体重(Rasmussen等人,2005)。关于肌肉数量及其在骨骼上的附着点的基本身体模型对于男性和女性人体模型保持相同。然而,对于男性和女性人体模型,缩放改变了骨骼的大小,质量分布和脂肪百分比。AMMR中提供的女性人体模型仅接受基于百分位数的缩放。虽然基于百分位数的缩放对于在工作场所优化应用中表示人口样本非常有用,当必须使用自定义高度和重量进行缩放时,这是不方便的。我们检查并发现,对于给定的手部位置和力量施加,男性和女性人体模型之间的强度绝对值存在显着差异。然而,由于男性和女性人体模型之间的手部位置和/或运动方向的变化,对力量变化的影响可忽略不计,因此男性和女性之间的强度比几乎保持不变。
在所有方向和手部位置保持不变。因此,选择了男性人体模型,其还允许根据自定义高度和重量进行缩放。
在人体测量缩放之后,模型的开发需要模拟正确的姿势,逆动力学分析和强度缩放。这些步骤将在后续章节中介绍。
左臂。实验装置和试验的一些图片提供了左臂的近似姿势。这用于粗略地模拟左臂姿势。模拟固定在框架上的左手,从而允许它在力的作用下作出贡献。
必须从工作点相对于操作员的位置估计操作员执行工作任务所采用的姿势。因此,诸如3DSSPP中的姿势预测算法对于人体工程学家快速驾驶人体模型进入操作员可能采取的姿势是有用的。虽然有利,但是这种姿势预测算法在AMS中是不可用的。但是,AMS提供了一个优化例程,用户可以通过定义要优化的功能来利用该优化例程来优化或预测姿势。文献中有几个这种所谓的逆 - 逆动力学方法的例子,其中身体关节角度已经在静态和动态活动中得到优化(Farahani等,2015a,2015b,2015c)。在当前工作的背景下,Farahani等人。(2015b)很有意思。当手受到不同大小的等长下方向力时,他们使用AMS来预测肩外展角。虽然这些参考文献显示了AMS在预测姿势方面的潜力,但目前工作的目的是要求人体模型的姿势与人口样本的平均姿势相匹配,以限制由于模拟和模拟之间的不平等姿势导致的预测强度误差。实证研究。因此,我们手动调整人体模型以匹配给定的姿势。本工作的目的要求人体模型的姿势与人口样本的平均姿势相匹配,以限制由于模拟和经验试验之间的不等姿势导致的预测强度的误差。因此,我们手动调整人体模型以匹配给定的姿势。本工作的目的要求人体模型的姿势与人口样本的平均姿势相匹配,以限制由于模拟和经验试验之间的不等姿势导致的预测强度的误差。因此,我们手动调整人体模型以匹配给定的姿势。
人体模型的肩臂系统由七个自由度(DOF)组成,需要相同数量的约束来完全定义上肢的姿势。肩部有三个自由度(上臂的外展,屈曲和旋转),两个位于肘部(屈曲和内旋),两个位于手腕(屈曲和偏离)。La Delfa(2011)的平均垂直和水平肩角以及肘关节屈曲角度在所有208个测试条件下在肩部(外展和屈曲)和肘部(屈曲)处提供了两个约束。称重传感器上的垂直手柄提供了两个限制:肘内旋和手腕偏差。使用AMS中的优化研究,从手部位置的水平角度驱动上臂旋转,使得穿过手和肩部的垂直平面与矢状平面对应相应的角度(0°,45°或90°)。最后,手腕屈曲不受约束,以避免计算不切实际的姿势。理论上,80%的手臂伸展可能提供了计算手腕屈曲角度所需的第七个约束。但是,添加第七个约束所需的精度不可用。虽然前六个DOF中有三个是使用经验测量驱动的,但其他三个DOF是由实验所假设的约束驱动的。这些条件可能存在偏差,这在实验试验期间是典型的。由于这些偏差无法验证,这三个和最终DOF中模拟和真实姿势之间的误差将复合并仅在最终DOF中反映出来。因此,可以在几个试验中计算出不切实际的手腕屈曲角度。不幸的是,实验性手腕屈曲角度不可用,并且得出结论,无法获得添加第七约束所需的精度。默认情况下,腕关节屈曲定义为0,随后,从模拟到手腕屈曲和手臂伸展百分比测量 实验性手腕屈曲角度不可用,并得出结论,无法获得增加第七个约束所需的精度。默认情况下,腕关节屈曲定义为0,随后,从模拟到手腕屈曲和手臂伸展百分比测量 实验性手腕屈曲角度不可用,并得出结论,无法获得增加第七个约束所需
全文共13817字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[2805]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

