英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
无线通信基于自动物流的技术的研究
Xuan Sun王志勇,赵哲东,济南大学机械工程学院,济南
me_sunx@ujn.edu.cn;b971917165@qq.com; C394396041@qq.com
绪论: 为了满足高实时性和高要求自动焊接系统中数据传输的稳定性,RTU数据该系统采用格式和实时通信机制。在自动物流系统中通过以太网和无线WIFI技术将码垛机,堆垛机,AGV车有机地结合在一起完成码垛机自动爬行货物,AGV车自动送货,堆垛机自动退出Dimensional仓库。
1简介
随着中国经济的不断发展,成本降低的优势人力资源逐渐消失[1]。 人力资源成本越来越高,越来越多的中国企业失去了市场竞争的优势,这些企业迫切需要引进自动化生产设备来取代人力,降低成本[2]。 自动物流系统不仅可以完全实现
取代人力,也大大提高了生产效率[3]。 但是,对于自动化物流系统,无线通信是这方面的技术难点自动化系统。 它要求系统之间的通信具有更高的实时性和更高的稳定性[4]。 因此,研究无线通信迫在眉睫适应复杂工业环境的网络环境,具有较高的网络环境实时性和稳定性[5]。
2自动物流的应用环境分析焊机系统
自动化仓库主要使用高级货架,标准托盘,货物存储,主要在立体仓库堆垛机中,结合自动化物流自动化仓库运营的设备。 配套设备主要包括码垛设备,AGV车等。 堆垛机将根据堆垛货物的规则,AGV来负责包装机的生产线随身携带的货物托盘放到三维仓库的入口处,堆垛机仓储作业。 同时堆叠器可以手动发送
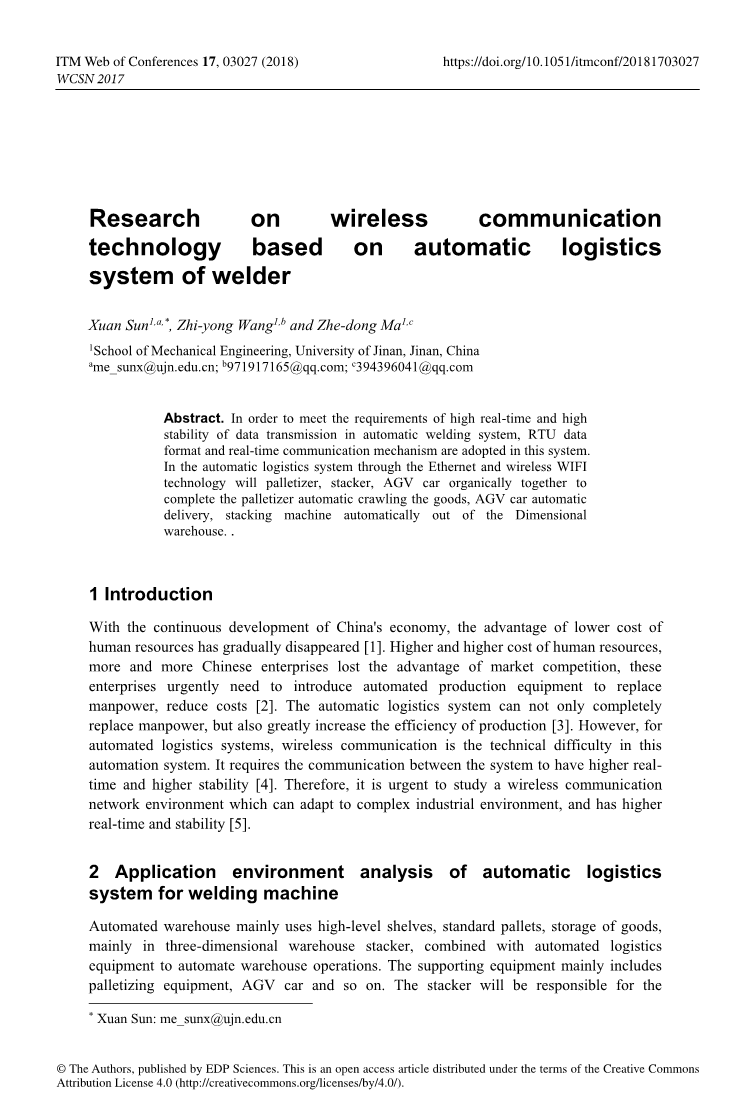
输出或接收管理计算机指令以进行出站操作。 整体而言系统布局如图1所示。
图1.自动仓库系统的布局
由于焊工的生产线需要运输到更远的距离在立体仓库300米,以减少影响系统在原有的生产环境中,AGV车必须在特定的路径上运行。 路径如图1所示。通过AGV汽车的运行路径,生产要求和成本分析。最后,我们将使用两台AGV进行焊机运输操作。 作为通信距离长,而AGV和堆垛机处于运动状态,这是传统的RS232,RS485等有线通信不能满足系统通信要求,所以本系统采用以太网通讯,具体方法是:使用工业WiFi信号路由器覆盖整个工厂。 连接管理PC(服务器),堆垛机控制器,码垛机控制器,AGV汽车和其他设备到路由器。
3网络结构
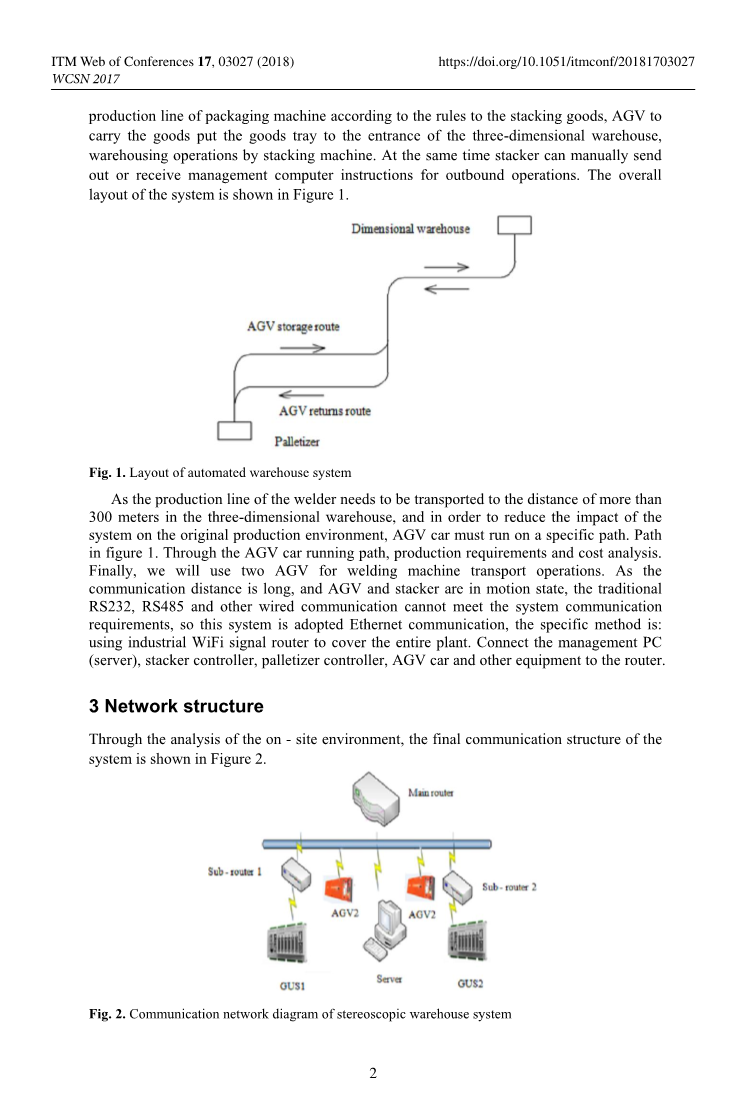
通过对现场环境的分析,最终的沟通结构系统如图2所示。
图2.立体仓库系统的通信网络图
在图2中,用PC作为TCP通信服务器的管理系统。堆垛机,码垛机,AGV承运人通过各自的互联网访问模块访问局域网,实时管理PC发送状态,请求和其他信息;管理PC接受每个设备的连接,堆垛机,码垛机,AGV运输车通过各自的互联网接入模块访问局域网,实时管理PC发送状态,请求和其他信息;管理PC接受各种设备的连接,以及验证,解释设备上传的数据,从而获得每个的当前状态
设备。并根据当前系统发送相应的控制指令状态,以便其他设备可以根据当前状态进行统一和管理每个设备。堆垛机和码垛机由运动控制器供电通过RS232串口与服务器通信到无线WIFI模块。 AGV还使用RS232串口连接无线WIFI模块。服务器是直接连接到Sub-router 2的LAN端口,因为服务器比较接近子路由器2的位置[6]。和有线数据传输比无线WIFI传输速度更快,更稳定,使其他设备可以制作各种信息更快速准确地传输到服务器。
4无线Wifi技术的应用
WIFI全称Wireless Fidelit,实质上是商业认证,带有Wi-Fi认证产品符合IEEE802.11a / b / g / n无线网络规范目前使用更广泛的WLAN标准,通常的工作频率是2.4GHz[7]。自动焊接物流系统主要采用无线WIFI技术由于以下几个方面:
(1)施工方便快捷。因为WIFI是一种无线技术。所以广泛的网络建设消除了大量的需求布线工作,只有一定数量的路由器,采用无线桥接技术来满足局域网的自动物流系统要求。
(2)无线电波传播得更远。目前,市场上的无线WIFI都可以在没有障碍物的情况下传输100到300米。但是,传输距离无线蓝牙仅约15米。但是障碍的阻碍很大降低无线WIFI信号的质量。
(3)传输速度非常快。目前,市场上的路由器都可以达到37.5Mbit / s,可完全满足自动数据传输的需要物流系统。由于工业设备的阻碍,无线WIFI信号的强度会降低大大减少,数据传输的质量将受到影响。因此,在一个非常复杂的工厂环境,单个路由器已经无法实现高效率和高质量的数据传输。为了获得高质量的数据传输方面,我们采用无线桥接技术构建无线通信信号强度大,覆盖范围广的环境。目前,无线桥接技术主要有以下三种:
1)点对点无线桥接;点对点无线桥接模式可用于远离信号传输数据。它由两个无线路由器桥接,从而使数据传输的距离加倍。
2)指向多点无线桥接;点到多点无线桥接模式支持分散式无线网络要集成到一个实体中,其中一个路由器充当主要路由器与所有其他辅助路由器通信。
3)桥接继电器桥接中继是两个局域网的应用,阻塞有一定的障碍传输数据。在焊机自动物流系统中,我们使用点对多点无线桥接模式,码垛机,堆垛机,AGV及时与服务器通讯,通过对站点环境和AGV轨迹的分析,我们使用了主路由器和
两个子路由器连接模式,路由器放置在图3中。
图3.路由器的位置图
图中显示的三个路由器都安装在更高的位置工厂减少工厂设备对信号的影响。为了提升数据传输的稳定性,所有路由器都有固定的IP地址,并为了减少其他国外设备抢夺IP地址,我们设置一个特定的设备是允许的访问特定路由器。堆叠器最靠近子路由器1,因此允许访问,并且AGV小车也将通过子路由器1的覆盖范围,并且也允许它可以访问。因此,我们必须绑定访问设备的MAC地址以阻止访问其他设备,以免影响系统的稳定性。子路由器2仅允许AGV车辆可以访问,但主路由器负责桥接另外两个子路由器并连接我们的服务器因此,在跑步过程中,AGV车可以选择哪个路由器可以根据自己的需要进行访问,从而确保AGV车能够及时将其状态信息传输到服务器。
5通信协议的选择
网络传输协议主要包括TCP协议和UDP协议UDP协议基于无连接,这需要较低的系统资源和传输效率高。 但是,UDP协议从中发送信息将终端发送到接收终端,但接收方是否已收到信息,它将无法验证,因此UDP协议的缺点是很差可靠性和容易丢失的数据包。
TCP使用面向连接的通信。在沟通过程中,它需要完成三次握手连接。这种三次握手是在接收终端和发送者之间接收和发送数据。三次握手是一样的如下:
(1)首先,在接收终端和发送终端之间建立连接。什么时候发送方需要发送数据,发送方会向接收方发送SYN报文,指示他们将进行通信,然后等待接收器的响应。
(2)当接收方收到发送方发送的SYN报文时,将对其进行分析数据包并根据自己的状态向发送方发送ACK SYN数据包,指示它已收到信息并能够进行通信。
(3)最后,当发送方从接收方收到ACK SYN包时,它发送一个ACK数据包到接收器。发送数据包后,整个连接过程就是完成。然后可以在接收器和发送器之间传输数据。通过使用TCP通信协议,数据通信的可靠性是大大改善了。因此,在发送有效数据之前已建立通信。为正式传输数据奠定了可靠的基础。而且,TCP有一个超时重传机制和数据验证机制,可以保证可靠性数据传输。在焊机物流系统中,由于传输数据较少,但数据可靠性较高要求更高,所以选择TCP传输协议。通过分析自动物流系统设备之间的通信信息焊机采用响应协议,采用RTU数据格式确保编程方便的基础。数据结构如表1所示。
数据解析如下:启动:0x5A,0xA5,因为WIFI无线通信,前两个字节的数据
经常出错,所以前两个字节的数据传输都是0x5A,0xA5,用来避免数据
传输错误。源设备号:用于指示正在传输信息的设备。0x01表示码垛机控制器(GUS1),0x02表示三维仓库控制器(GUS2),0x03代表三维仓库控制器
(转盘3),0x04代表AGV1,0x05代表AGV2,0x06代表进来的PC(服务器)。数据长度:0x03字节后有3个字节,供服务器验证数据。控制命令:0x01表示请求输入转盘指令,0x02表示AGV到达指令的指定位置。控制参数:当控制指令为0x01时,控制参数为0x01,说要求输入1号转盘说明书。检查:控制命令和控制参数的XOR。因为控制指令段和控制参数段是服务器和下位计算机需要执行的参数和命令,它是必须确保数据的正确性,而其他数据对数据的影响不大执行程序。当发送方发送数据时,控制指令和控制参数是异或,然后将运算结果放入校验字节。当接收端五ITM网络会议接收数据,控制指令和控制参数是异或的
将操作结果与接受的校验字节进行比较。如果数据相同,那么接收器然后将解析数据并将响应数据发送给发送者。如果数据是不同的是,接收器不会解析数据而不会发送响应数据。之后一段时间内,如果接收方无法接收到响应数据,将被重新发送给接收相同的数据。如果发送方重传5次,则数据仍然没有收到响应数据将报警,但发送方将继续重新传输数据。如果你重新发出1000次,仍然无法到停止发送的答案,等待处理。收到响应后会自动终止报警并执行下一步行动。通过这种数据验证,确保数据的准确性,使整体系统更安全可靠。当服务器收到以下数据时:0x5A,0xA5,0x04,0x03,0x01,0x02,0x03,表示AGV1请求访问转盘2。使用这种数据格式,发送者和接收者重复检查数据确保数据的正确性。 7字节的数据长度不仅可以完成焊接自动化物流系统的各种信息传输需求,并尽可能地缩短数据长度,提高数据传输效率,满足要求系统要求高实时性。
6消息传输机制
根据焊机生产率分析,生产过程必须两台AGV同时工作,以满足生产要求。 为了阻止两次AGV碰撞,AGV操作必须由服务器统一规划。 这需要服务器能够理解每个AGV的具体位置。 经过分析后AGV的运行路径,最终确定了六个重要位置,如图4所示。在这六个位置中,IC卡被固定为六个位置的标志。 当AGV到达每张卡后,位置信息被发送到服务器。 服务器获得AGV位置信息,以准确控制AGV,码垛机,堆垛机的操作使整个系统安全高效运行。
图4. IC卡位置图
通过AGV移动,连接将在多个路由器之间进行转换。使连接时间更长。 位置信息无法发送到服务器及时。 而在复杂的环境中,会产生一些无线信号干扰
暂时中断AGV,码垛机,堆垛机与服务器的通讯。 所以当AGV和服务器通信中断,AGV将停止并等待,并将继续为了向服务器发送信息,AGV在服务器收到之前没有重新启动信息。如果服务器在发送一定数量的服务器后没有成功应答消息,系统会报警,使整个系统运行更安全。其中,两个AGV通过无线串口转换装置来实现串行信号转换为无线以太网信号,码垛机和三维信号仓库通过无线WIFI模块将有线以太网信号转换成无线以太网信号。管理计算机通过以下方式获取无线以太网信无线网卡。该设备同时连接到同一网络节点。然后通过响应机制建立连接。为了实现系统调度和监控。在通信网络中,有五个设备,即管理计算机,AGV1,AGV2,立体仓库堆垛机,码垛机,基本通讯要求如下:其中,为了实现存储控制,AGV1,AGV2,三维仓库堆垛机,码垛机与服务器通信。 PC与仓库堆垛机通信,并与完成产品到仓库的操作。为了达到通信要求,有两个基本程序,一个是设备之间没有统一管理。每个设备仅建立连接何时需要发送消息。通信完成,并关闭连接。当AGV1到达车站时,请求进入转盘2将发送请求服务器。然后,服务器向堆栈器控制器发出查询命令。堆叠器发送根据自己的状态向服务器发出指令。当服务器收到堆栈器时信息然后决定是否允许AGV1进入2号转盘并发送信息。 AGV1在收到服务器信息后执行操作。该这种传输机制的优点是少量数据和设备相互独立。因为数据是在需要数据时发送的,并且导致实时性差,不方便统一监控状态。二,通过无线WIFI建立局域网,每个设备不断向服务器发送状态信息,称为实时沟通机制。当AGV发送各种请求信息时,服务器根据收到的信息直接向AGV发送指令。什么时候AGV1发出0x5A 0xA5 0x04 0x03 0x01 0x02 0x03(AGV1请求进入2号(转盘)信息,服务器根据收到的信息直接回复。
当AGV1到达2号转盘站的请求时,服务器发送一个直接命令允许AGV1根据码垛机状态进入2号转盘已收到的信息。同时为了能够实时监控每个设备和服务器连接,设备将在线发送每隔5秒向服务器发送一次信息,表明与服务器的通信良好。
当服务器无法接收设备在线信息时会报警,改善整个系统的可靠性。这种通信机制的优点很小数据量。方便统一管理,监控,实时性好。为了提高系统的实时性和易管理性,进行沟通系统使用第二个程序。也就是说,将计算机管理为LAN
服务器,作为客户端的其余设备,以及计算机的管理建立联系。为了减少查询次数,改善沟通效率。状态更改后,每个设备立即将状态上载到服务器。至方便服务器准确判断系统状态,发出正确的命令。
7结论
焊接自动物流系统采用无线WIFI技术构建局部区域网络,并完成各种设备之间的数据传输。 现场测试,系统,使用RTU数据格式和实时通信机制,完全能够满足高实时性和高稳定性的数据传输要求。
参考文献
[1]魏晓辉,杨美珍。 无线WiFi技术应用分析。 现代商业。 2013(18):26-32。 用中文(表达。
[2]杨力。 WiFi技术原理与
全文共5905字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1728]

