英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于HILS的相对位置和方向发展带耦合装置的车队车辆测量系统
摘要:我们提出了一种新型的车辆,它不采用耦合装置来牵引后面的车辆,而是采用耦合装置测量前后车的相对位置和方向。以下的车辆由他们自己的马达驱动。本文说明了相对位置和方位测量的发展系统。在耦合装置中,销周围装有多个距离传感器。这些传感器在销和六角形环之间获取距离。距离值数组转换为相对位置和车辆方向使用了以下两种方法:(1)几何法(2)数据查找法。在实现了一个测量系统的原型后,利用硬件在环仿真(HILS)对多辆车的排队行驶进行了仿真。因此,系统的能力不仅通过测量精度进行评估,而且通过队列性能进行评估。实验结果表明,该测量系统是有效可行的。数据查找方法由于不显式地使用几何条件,因而表现出特别优越的性能。
关键词:汽车、自驾汽车、硬件的环仿真技术、数据驱动方法
- 介绍
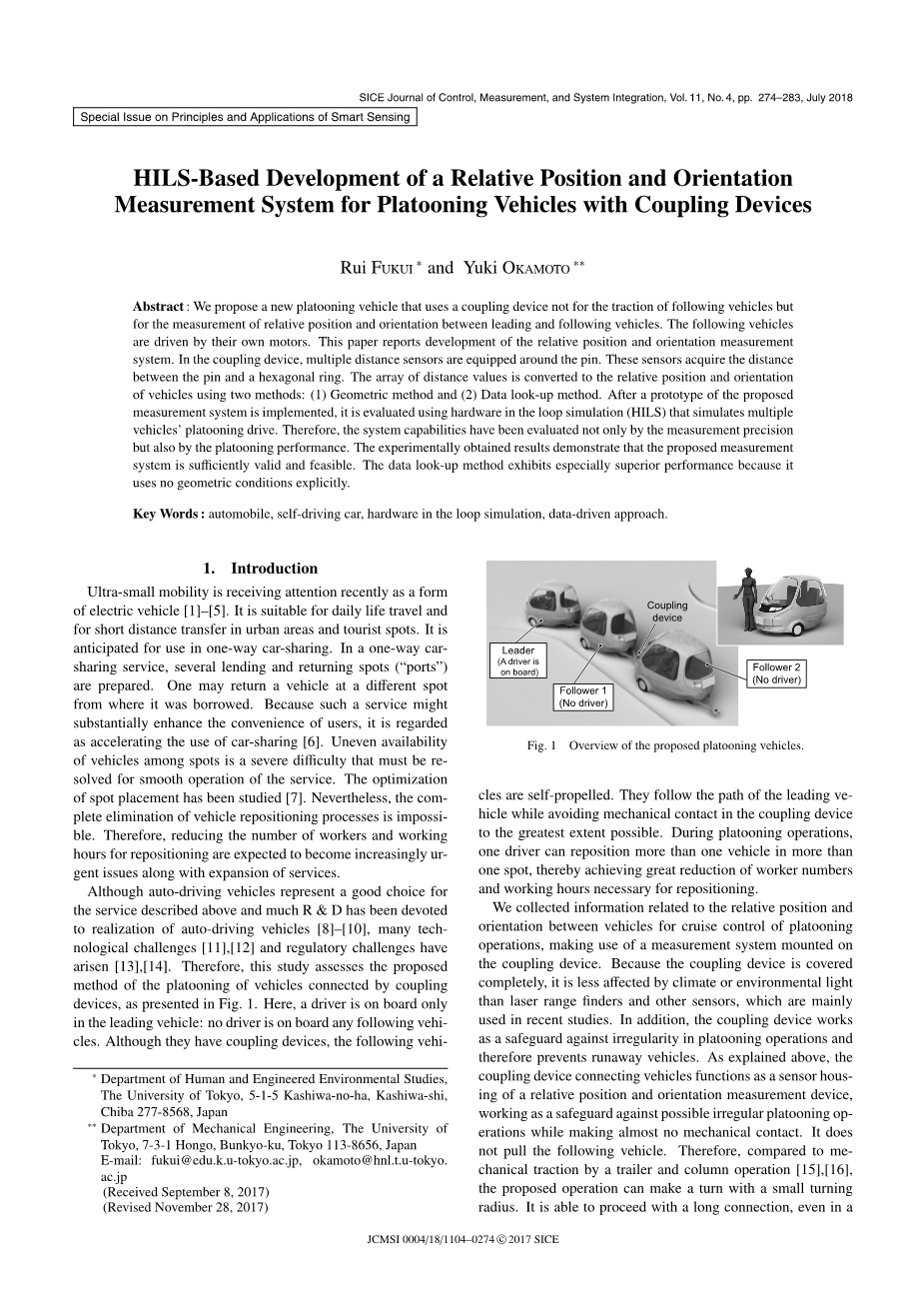
超小型机动性作为电动汽车的一种形式近年来受到关注。适用于日常生活旅游和城市、旅游景点的短途换乘。它预计用于单向汽车共享。在一个单向汽车共享服务,几个贷款和返回点(“港口”)准备。你可以在一个不同的地点归还一辆车。因为这样的服务可以大大提高用户的方便性,所以被认为是加速了汽车共享的使用。站点间车辆的不均匀可用性是一个严重的困难,必须解决这一问题才能使服务顺利运行。光斑位置的优化问题已经被解决。然而,完全消除车辆重新定位过程是不可能的。因此,随着服务的扩大,减少工人数量和重新定位的工作时间将成为越来越紧迫的问题。尽管自动驾驶车辆是上述服务的良好选择,并且大量研发致力于实现自动驾驶车辆,但出现了许多技术挑战和监管挑战。因此,本研究评估了由耦合装置连接的车辆队列的建议方法,如图1所示。在这里,司机只在前面的车上:没有司机在后面的车上。尽管它们有耦合装置,但以下车辆是自动推进的。它们遵循主要路径,同时尽可能避免耦合装置中的机械接触。在车辆列队的过程中,一个驾驶员可以在多个地点重新定位多辆车,从而大大减少重新定位所需的工人数量和工作时间。
我们利用安装在耦合装置上的测量系统,收集了与车辆之间的相对位置和方向有关的信息,用于队列操作的巡航控制。由于耦合装置被完全覆盖,因此它受气候或环境光的影响小于激光测距仪和其他传感器,后者主要用于最近的研究中。此外,耦合装置还起到防止队列操作不规则的保护作用,从而防止车辆失控。如上所述,连接车辆的耦合装置作为相对位置和方向测量装置的传感器外壳,在几乎没有机械接触的情况下,起到防止不规则排列操作的保护作用。它不会拉动以下车辆。因此,与拖车和立柱操作的机械牵引相比,所建议的操作可以进行较小转弯半径的转弯。它可以进行长连接,即使在曲折狭窄的小路上。
图1 目标排车系统总览
本文介绍了我们研制的相对位置和方位测量系统,该系统是装备我们所提出的定位装置的排车核心技术。本研究的目标是:(1)提出一种方法,对安装在耦合装置上的传感器进行测量和处理此类测量收集的数据;(2)验证该建议,检查相关因素对排动操作性能的影响。因为在我们开始本研究时,我们的目标项目的整个系统的实施是困难的,所以我们只实现了相对位置和方向移动测量系统,并将“循环模拟硬件”(HILS)软件应用于我们系统的其余部分。
本文的结构如下。第2节概述了排车的相对位置和方向测量系统,并描述了利用测量系统和HILS获得的信息对排车进行巡航控制的框架。然后,第3节介绍了我们开发的测量系统的实际实现,以及用于估计车辆相对位置和方向的方法。第4节介绍了我们的实验,评估了由HILS辅助的排兵作战。最后,第5节给出了结论。
- 用连接器连接的排车相对位置和方位测量系统
2.1耦合装置的相关位置和方向测量
图2描述了我们提出的列队车辆和耦合装置的示意图。该车钩包括一个固定在导引车辆上的销和一个连接在下面车辆上的环。销在环内部的域中自由移动:它完全不受约束。我们测量了两辆车之间的相对位置和方向,间接估计了销和环之间的相对位置(x,y)和方向(theta;)。排长操作是基于速度和角速度的控制信号执行的,由上述测量数据生成。在实际应用的排车设计中,虽然必须考虑Z向位移和纵摇和横摇的方向(姿态),但我们首先对平面位移(x,y)和方向(theta;)进行了全面的分析,以简化评估。此外,作为项目的第一步,本研究假设拟建车辆行驶区域的路面非常平坦。下一步研究将考虑路面的凹度和凸度。
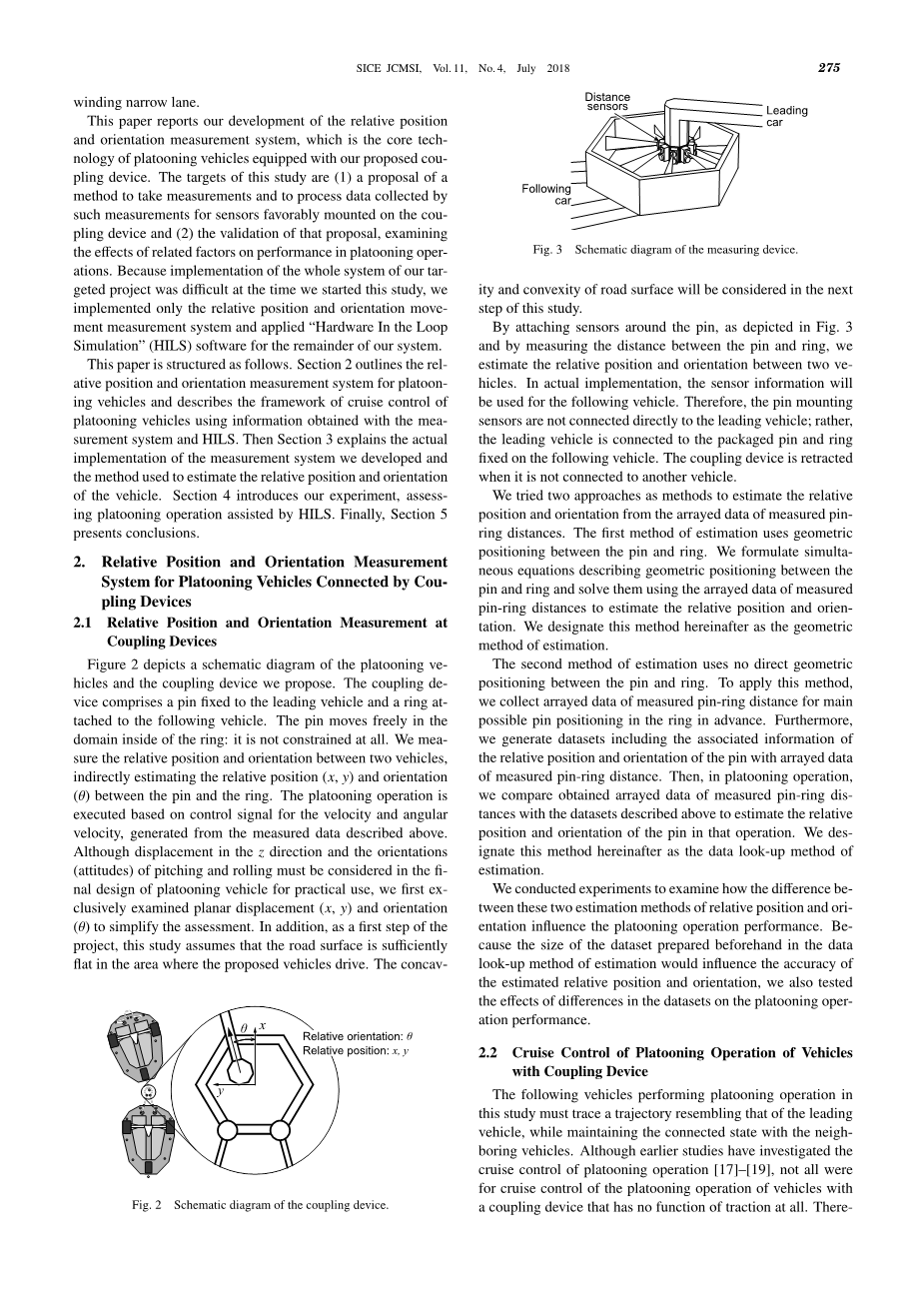
通过在销周围安装传感器(如图3所示),并通过测量销和环之间的距离,我们估计两个销之间的相对位置和方向。在实际实施中,传感器信息将用于以下车辆。因此,销安装传感器不直接连接到引导车辆;而是连接到固定在后续车辆上的封装销和环。当耦合装置未连接到另一辆车上时将收回。
图2 耦合装置原理图
图3 测量装置原理图
我们尝试了两种方法来估计相对位置和方向的阵列数据测量销环距离。第一种估计方法使用销和环之间的几何定位。我们建立了描述销与环之间几何定位的同时方程,并利用测得的销与环距离的阵列数据进行求解,以估计销与环之间的相对位置和定向。我们将此方法命名为几何估计法。
第二种估计方法不使用销和环之间的直接几何定位。为了应用这种方法,我们预先收集了测量销环距离的阵列数据,以便在环中进行主要可能的销定位。此外,我们还生成了数据集,包括销的相对位置和方向与测量销环距离的阵列数据的关联信息。然后,在队列操作中,我们将获得的测量销环偏差阵列数据与上述数据集进行比较,以估计销在该操作中的相对位置和方向。本文将此方法称为数据查询估计法。
我们进行了实验来检验这两种相对位置和方位估计方法之间的差异如何影响排车性能。因为在数据查找估计方法中预先准备的数据集的大小会影响估计的相对位置和方向的准确性,我们还测试了数据集中的差异对队列操作性能的影响。
2.2带耦合装置的车辆排程运行的巡航控制
在本研究中,下列车辆在进行排程操作时,必须追踪类似于主车的轨迹,同时保持与相邻车辆的连接状态。虽然早期的研究已经研究了队列运行的巡航控制,但并非所有的研究都是针对带有耦合装置的车辆队列运行的巡航控制,该耦合装置完全没有牵引功能。因此,正如本文所介绍的,我们开发了这一新的巡航控制系统,用于队列操作。
我们的排车巡航控制器有两个目标。一是保持车辆之间的联动。因此,我们试图使安装在以下车辆上的控制器将以下车辆前面的耦合装置的中心定位到引导车辆后面的耦合装置的中心(图4)。我们将此功能指定为耦合装置的跟踪控制。
第二个目标是使后面的车辆与前面的车辆在同一轨道上运行。因此,我们试图使安装在以下车辆定位点Xref上的控制器远离以下车辆的中心,进入引导车辆的轨道(图5)。
图4 联合跟踪示意图
图5 路径跟踪示意图
我们将此函数指定为轨迹跟踪控制。通过对测量的相对位置和方向的积分,计算出导引车的轨迹。
结合这两种控制方法,我们开发了一种巡航控制器,用于上面描述的队列操作。方程式(1)和(2)是我们的巡航控制器对排车的控制表达式:
该控制器对角速度控制信号(omega;)采用上述轨迹跟踪控制,对平动速度控制信号(V)采用上述耦合装置的跟踪控制。这两个方程都描述了PID控制。对于平动速度,我们采用耦合装置跟踪控制来跟踪引导车辆。然而,对于角速度,我们必须使用两种控制方法,因为角速度决定了运动方向。然而,如果队列操作按比例1执行,则轨迹跟踪控制与耦合装置的跟踪控制类似。因此,我们决定只用轨道跟踪控制来控制角速度。图4和图5描述了theta;路径、Xjt和Yjt方程。所有的komega;p、komega;d、komega;i、kv、kvp、kvd、kvi都是PID系数。此外,式(2)中的vlead是使用式(3)计算得出的主要车辆的估计传递速度;vpre是在控制的前一步中,以下车辆的平移速度的输出。
此外,我们对车辆运动的模拟仅包含使用等式(4)计算的运动学。因此,我们必须在未来的研究中评估动态因素的影响,如车辆重量和车轮与路面之间的摩擦。式(4)中的符号vr和vl分别表示左轮和右轮的平移速度;d是从机轴到车轮的距离。符号rho;表示转弯半径。此外,利用平动和角速度,将车辆在全球坐标系中的行为描述为方程(5)。
2.3排车的的HILS辅助仿真
我们使用HILS评估了我们的相对位置和方向测量系统。HILS可以在不使用硬件的情况下模拟开发对象的行为。此外,软件仿真的使用可以帮助我们在更接近实际使用的条件下检验开发对象。如图6所示,我们的HILS包括一个安装有传感器的销和环的测量系统、一个作为模拟器工作的PC(个人计算机)和一个带电子级的试验台。
HILS遵循以下步骤。步骤1:安装在测量系统销上的测距传感器测量到环内壁的距离。第二步:根据测得的销环距离的阵列数据估计相对位置和方向。第3步:使用该估计值,用于队列操作的巡航控制器计算平动和角速度的目标值。步骤4:使用这些目标值的平动和角速度车辆运动模拟器(仅基于运动学)更新了车辆之间的相对位置和方向。步骤5:利用这一更新的车辆之间的相对位置和方向,试验台安装电动阶段移动以更新测量系统中的销位置和方向。然后我们回到步骤1。
图6 HILS配置图
- 车辆之间相对位置和方向移动的测量
3.1测量系统的基本设计
测量系统由安装在主导车辆上的销和固定在下面车辆上的环组成(图3)。销上安装有传感器。红外测距传感器安装在销的周围,由于其非接触性和重复测量的耐用性而被选择。在估算位置(x,y)和方向(theta;)的三个变量时,销必须由比最小值更有效的传感器安装,并且在制造工作和几何计算中必须具有简单的几何测量。因此,我们准备了一个规则的八角形销,并在八角形面上安装了八个传感器:每个面上都有一个传感器,如图3所示。
为了便于制造和简单的几何计算,首选规则多边形环几何。随着多边形顶点的内折线数的增加,与环形折线中心旋转对称的点数也随之增加。当管脚位于其中一个点上时,范围输出相互相等,导致数据处理混乱。排兵行动中的最小旋转半径设定为6米,与微型飞行器相同。车辆长度设为3 m,表示两辆连续车辆之间的最大定向30。通过这些设置,如果多边形环的顶点不超过6个,那么上述对称点的旋转超过60度,实际上消除了上述可能发生的碰撞。但是,如果多边形环有接近三个顶点(包括在内),则销的可移动区域变窄,这样的配置需要一个相当大的环。基于这些考虑,我们选择了准六边形作为环的内壁面形状。
图7 测量装置和活动台总览
图8 测量装置框图
为了在确定耦合装置的粗略尺寸时找到耦合装置中销的可移动区域,我们结合巡航控制方法、销的相对位置和方向测量误差以及测量装置信号传输延迟。根据初步实验的结果,我们确定了销的可移动区域为一个六边形的内部,该六边形用230mm的Ra-Dius绕一个圆。图7概述了测量装置和电动活动台。活动台有三个执行机构:X、Y和theta;方向各一个。该图显示了安装八个量程传感器的销的特写图片。位置敏感探测器(gp2y0e02b;夏普)用作距离传感器。八位微型计算机(atmega328p;atmel)用作采集传感器输出的设备。我们用A5052铝制作了这个环来反射传感器的辐射。环的内壁先经过喷砂处理,然后再经过铝化处理。表面处理增强了内壁对传感器红外发射的反射,提高了测距数据的准确性,这是我们初步测试的结果。图8描述了测量装置的方框图。
3
全文共11425字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1001]

