
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
一种可提高车辆动力学性能的新式磁流变液限滑差速器
Riccardo Russo, Salvatore Strano, Mario Terzo
意大利那不勒斯大学工业工程系
摘要
本文提出了一种新型的汽车可控差速器,发明过程中首先在软件环境下进行了测试,然后在物理样机的基础上进行了硬件回路程序的测试。该装置基于磁流变液原理,其磁场产生锁定力矩,从而产生纠正偏航力矩。本次设计建立了基于滑模法的偏航力矩控制器的车辆模型,并采用该模型设计了一种基于滑模法的偏航力矩控制器。对控制器所应有的反馈用卡尔曼滤波估计进行了扩展。结果表明,该装置可以有效改善车辆动力学性能。实际上,车辆在使用新的差速器的情况下所取得的结果证实了稳态和非稳态操纵性能的改善。在测试所得的数据与微分建模的误差在允许的范围内,验证了物理模型。
关键词:车辆动力学 汽车 差动 硬件仿真 磁流变液
- 介绍
近年来,汽车领域的研究一直集中在车辆动力学的主动控制系统上。较著名的系统有控制车辆制动[1,2]和防止不稳定行为[3,4]。属于后一类的系统一般表示为偏航力矩控制系统,并被采用以加强处理和防止不稳定行为。它们基本上可以分为三大类:基于差动制动的系统,基于控制扭矩分配的系统,以及线控系统[5]。关于转矩分配系统,它们的基本特征是限滑差速器(LSD)能够产生内部锁定转矩,允许区分输出扭矩并在车辆上产生纠正偏航力矩。内部锁紧力矩的存在使LSD不同于更常见的开路差速器,差异表现在,常见的开路差速器两侧齿轮的扭矩在不同情况下是相同的。此外,与被动LSD不同的是,可控LSD能够产生内部锁定效应,从而产生扭矩分配,可以在车辆行驶中产生调整,因此,不产生不理想的动态行为[6-8]。本文主要研究一种基于新型可控汽车LSD[9,10]的转矩分配系统,该系统利用磁流变液产生内锁转矩,实现了驱动力矩的不对称分配,产生了偏航力矩控制。
磁流变(MR)流体由微米大小的铁粒子悬浮在载体流体中组成;它们的流变行为可以通过外加磁场来改变。研究人员利用屈服应力的控制变量来开发各种智能设备,如减振器、变速器离合器和制动器[11-17],但科学文献中没有关于基于MR流体的汽车差速器设计和开发的例子。因为它会更详细的文本中,新的磁流变液限滑差速器LSD (MRF)可分为半有源设备,在这个类别,它的特点是不需要侵入性的根本优势附加驱动系统(如液压回路)进行内部部分锁紧扭矩的生成。此外,无滑动部件接触,这是典型的半主动多盘离合器的有限滑差[18],减少粘滑和磨损现象。从动态性能上看,磁流变液的瞬态特性使该装置成为偏航力矩控制[10]的功能系统。
本文还介绍了MRF LSD回路测试的软件仿真和硬件设计,以评价该装置的有效性。通过建立MRF LSD装备车辆的数学模型,进行了环路仿真。为此,设计了一种控制算法和一个扩展卡尔曼滤波器来生成MRF LSD的控制动作。此外,在回路中给出的硬件结果,有助于评价物理MRF LSD与仿真车辆的集成性能,并通过合适的算法进行控制。
本文具体内容如下:第2节给出了该装置的描述,第3节给出了MRF LSD装备车辆的数学模型。控制器的设计,以及一个扩展的卡尔曼滤波器综合,详细的分析在第4节。软件仿真和硬件仿真结果分别在第5节和第6节中给出。最后一节为小结。
- 磁流变液限滑差速器
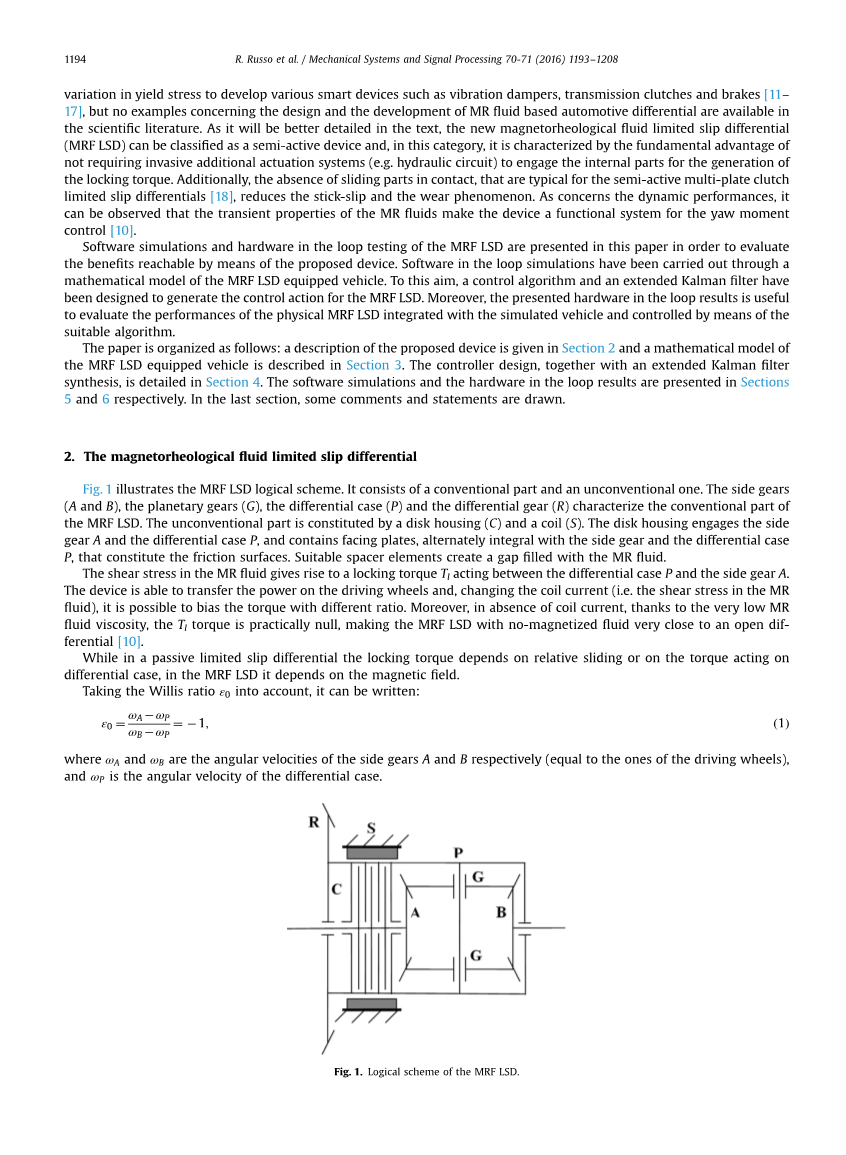
说明了MRF LSD的逻辑方案。它由常规部分和非常规部分组成。侧齿轮(A和B)、行星齿轮(G)、差速器壳体(P)和差速器(R)是MRF LSD的常规部件。非常规部分由盘壳(C)和线圈(S)组成。盘壳与侧齿轮a和差速器P啮合,且面对面接触,侧齿轮和差速器P交替,构成摩擦面。产生一个充满磁流变液的间隙
磁流变液中的剪切应力产生锁紧力矩Tl,作用于差速器壳体P和侧齿轮a之间。该装置能够传递驱动轮上的动力,通过改变线圈电流(即磁流变液中的剪切应力),可以使扭矩以不同的比例偏置。在没有线圈电流的情况下,由于非常低的MR流体粘度,Tl转矩实际上为零,使得具有无磁化流体的MRF LSD非常接近开路差动[10]
在无源限滑差速器中,锁定力矩取决于相对滑动或作用于差速器的力矩,而在磁流变液中,锁定力矩取决于磁场
考虑到威利斯比率ε0,它可以写为:
(1)
其中omega;A和omega;B分别是侧齿轮A和B的角速度(等于驱动轮的角速度),omega;P是差动齿轮的角速度。
MRF LSD的逻辑方案
从(1)可以观察到,差速器外壳的速度是侧齿轮速度的平均值:
(2)
通过转动平衡方程、能量平衡和(2),可以确定输出转矩TA和TB的表达式。在稳态条件下,为作用于差速器壳体上的转矩TP,为作用于差速器壳体P与侧齿轮A之间的锁紧转矩Tl所产生的功率Wl,可以表示为:
(3)
转矩TA和TB可以表示为
(4)
功率wl,采用公式计算TL,由
(5)
因此
(6)
得到
(7)
通过适当的控制系统,可以调整锁紧力矩Tl,提高车辆的动态性能。该装置是半主动的,因为它可以调节锁紧转矩值,而转矩通量方向仅由车轮运动学确定:所提供的能量决定了从速度最快的侧齿轮到速度最慢的齿轮的可控转矩通量,从而在大范围的工作条件下锁定差速器。
如上所述,带有非磁化流体的MRF LSD表现为一个开路,具有降低能量损失和不需要的扭矩分配的相关优势。因此,只有在产生车辆动力学改善时,驱动力矩才能被控制地分割
MRF LSD截面模型如图2所示,其组件如表1所示。在列出的部件中,只有线圈及其壳体相对于齿轮箱是静止的,以避免移动电接触点
差速齿轮(图2中的5)是由包含由盘壳和线圈的非常规部件而组成的。
就MRF LSD的常规部分而言,它的一种形状和尺寸基于商用开放式差速器,这种差速器一般配备于中等档次的汽车
- 汽车模型
采用五自由度模型对后轮驱动车辆的运动进行了仿真。[5]将由于存在锁定扭矩提供的MRF LSD。图3为惯性参考系Oxy中的车辆,定义了车身固定参考系Bxy。在同一图中,v为定轴系统的质心绝对速度,u(纵向速度)和v(横向速度)为其在车辆轴系中的分量;r是参考系Oxy中计算的偏航率,Fxkj 和Fyij (kfrac14;2, ifrac14;1,2 和 jfrac14;1,2) 分别是,轮胎-道路相互作用力的纵向和横向分量(图3)
前后轮轨道用t表示;前后轴到重心的距离分别用a和b表示。方向盘前面轮胎用delta;角,认为方向盘不控制后方轮胎。在水平方向和垂直轴周围气动作用可忽略的假设下,装有MRF LSD的后轮驱动车辆的平面内运动方程为:
(8)
rho;是空气密度,Cx为气动阻力系数,Af是车辆正面区域,R是车轮半径,IR是车轮转动惯量,TA和TB由(6)给出,m是车辆总质量,Jz是通过车辆质心的垂直轴的车辆惯性矩,
omega;21和omega;22是后轮的角速度,I是电源电流。式(8)中最后一个方程为电流I与锁紧力矩Tl之间的MRF LSD动态关系[9,20]。此外,考虑到侧齿轮和车轮之间的刚性连接,由此可见,omega;21frac14;omega;A和omega;22frac14;omega;B。的状态和输入向量Eq。(8)通过xfrac14;u分别定义;v; r;omega;21;omega;22;Tlfrac12;T和ufrac14;frac12;delta;;TP;T。所以,(8)的非线性函数可以表示为
每个轮胎的滑移角分别为
(9)
轮胎-道路的相互作用力已经用Pacejka公式[21]建模。首先,计算了纯纵向和纯侧向轮胎力Fx0和Fy0,没有组合效应:
(11)
也适用于以下情况:ci;Bi;ei;ia x;y;xalpha;;ysigma;轮胎模型参数,通过识别程序得到,fz为垂直载荷,mu;为摩擦系数,alpha;为滑移角,sigma;为纵向滑移。
(12)
用VX作为车轮中心速度在轮胎中间平面上的分量,omega;表示车轮角速度,R代表车轮半径。
利用加权函数Gx、alpha;和Gysigma;考虑了组合相互作用。联合轮胎力fx和fy是由
(13)
(14)
参考车辆侧倾运动的静态方法,可以在考虑横向荷载传递的情况下导出法向力[5]。
(15)
当g是重力时,d是滚轴与经过y轴的垂直平面交点的高度,h是重心的高度,kphi;1和kphi;2分别是前轴和后轴的横摇刚度(考虑到悬挂单元引起的滚动刚度),它们的总和用kphi;1 kphi;2表示。
在下面的软件中,将采用模型(8)进行循环测试。此外,在消除最后一个方程的基础上,对采用物理MRF LSD的硬件回路验证也采用了模型(8)。
- 控制器设计
MRF LSD的控制基于图4所示的体系结构
从现有的典型测量指标(即偏航率r、转向角delta;、节气门位置thetasym;、角速度omega;21和omega;22)和估计变量出发,上层控制器的目的是生成下控制器的输入,该输入是由MRFLSD的目标锁定转矩(TLT)给出的。该量是根据偏航率(RT)和车辆滑移角(beta;T)的目标值得到的,目的是达到预期的车辆性能。从目标锁定转矩开始,较低的控制器作为控制动作为MRF LSD产生电源电流。
预期MRF LSD的启动有两种情况:车辆的转向不足行为和转弯时的断电作用[19]。对于欠转向情况,如果内驱动轮(omega;id)比外部驱动轮(omega;ed)快,则MRFLSD被激活:这种现象通常发生在较高的横向加速度时,并且是由驱动力矩和横向载荷转移引起的综合效应引起的。内轮的识别是通过转向角来实现的。
因此,只有在下列情况下,MRF LSD才能在转向不足的情况下发挥作用:
(17)
用beta;^1/4arctan v^=u^表示从估计量(图4)得到的变量为^。在装有直线轮胎的单轨模型[3,5,21]的基础上
全文共9930字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[996]

