数字孪生驱动的复杂机电产品
故障预测和健康管理
Fei Tao a, Meng Zhang a, Yushan Liu a, A.Y.C. Nee (1)b
(a自动化科学与电气工程学院,北京航天航空大学,北京,100191,中国
b机械工程系,新加坡国立大学,新加坡,117576,新加坡)
摘要:故障预测与健康管理(PHM)对产品的生命周期监测是十分重要的,尤其是对于在恶劣环境下工作的复杂机电产品。为了提高PHM的精确性和效率,针对复杂机电产品提出了一能够实现虚实融合的新兴技术——数字孪生。首次构建了复杂机电产品的标准化数字孪生模型,提出了一种基于数字孪生驱动的故障预测与健康管理(PHM)新方法,有效利用了数字孪生的交互机制和数据融合。本文以风力涡轮机为案例验证所提出方法的效果。
1.序章
飞行器、轮船和风力涡轮机等复杂机电产品通常设计要求在恶劣工作环境下工作数十年。因此在工作过程中出现性能退化是不可避免的,性能退化会导致出现故障,造成高额的维修费用。为了保证复杂机电产品运行的可靠性,引入了故障预测和健康管理(PHM)。PHM通过监控设备状况,进行故障诊断和预测,从而提供维护的设计规则。
但是,目前大多数的PHM主要由设备的物理实体进行驱动,很少与虚拟模型进行联系。当前随着信息物理系统(CPS)的发展,为了改进复杂设备的故障预测与健康管理,重视虚拟空间和实现物理空间和虚拟空间的完美融合是至关重要的。在这样的背景下,设备在虚拟空间中的数字镜像和它的数据被引入于描述实体的行为。在参考文献2中对潜在的应用进行了探索,然而,实现物理空间和虚拟空间双重驱动的PHM仍然存在一些常见问题未得到解决。(1)建立高保真的数字镜像来详细描述设备;(2)建立设备与数字镜像之间的联系并使其更好的支持PHM;(3)融合物理空间和虚拟空间的数据提供精确的信息给PHM。
在本篇文章中,数字孪生作为虚实融合的标准化模型被应用于解决以上三个问题。第一,基于数字孪生,在几何,物理,行为和规则的不同层次建立了设备的高保真数字镜像模型。模型提供了在不靠近物理设备下接近设备的方法。第二,数字孪生的交互机制能够探测来自环境的干扰,设备的潜在故障和模型的瑕疵。这是一个耦合的优化使设备实体和数字孪生模型连续发展。第三,数字孪生包含了来自设备实体和数字模型的数据,以及它们的融合数据,能够提供精确丰富的数据应用于PHM。
在本文的研究中,首次建立了复杂机电产品的数字孪生五维模型,提出了一种基于数字孪生驱动的复杂机电产品的故障预测与健康管理方法,对其的整体框架和工作流程进行了详细探究。通过以风力涡轮机为代表的案例分析来证明提出方法的效果。
2数字孪生五维模型
Grieves教授首次建立了一个通用和标准化的数字孪生模型架构。在这个架构中,从物理实体,虚拟实体和两者之间的联系这三个维度对数字孪生进行建模。其被应用与产品设计和产品本身。基于此,本文在加入了数字孪生数据和服务后提出了一个五维框架的数字孪生模型。和Grieves教授的框架相比较,除了虚实之间的联系,所提出的模型还利用数字孪生数据融合现实和虚拟两个层面的数据为了获取更加广泛和精确的信息。它也封装了数字孪生来自于服务(如检测、判断和预测等)的性能以便于统一管理和按需使用。
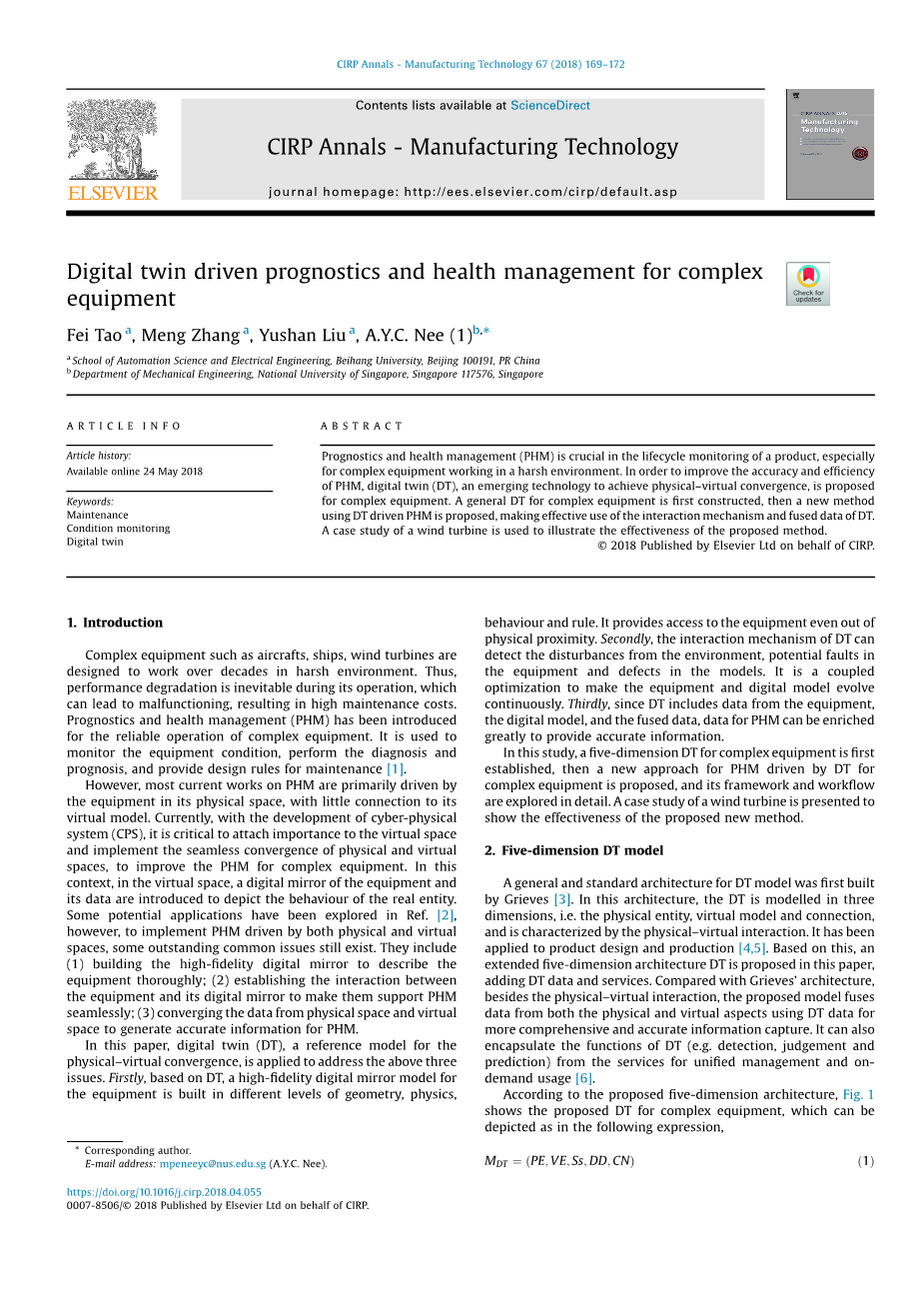
按照提出的五维框架,图1 展示了针对复杂装备提出的数字孪生,如下述表达式进行描述:
图1 复杂设备的数字孪生五维模型
其中PE代表物理实体,VE代表虚拟设备,Ss代表PE和VE的服务,DD代表数字孪生数据以及CN代表PE,VE,Ss和DD之间的联系。为了阐释针对复杂设备提出的数字孪生,以风力涡轮机为例进行研究。
2.1物理实体模型
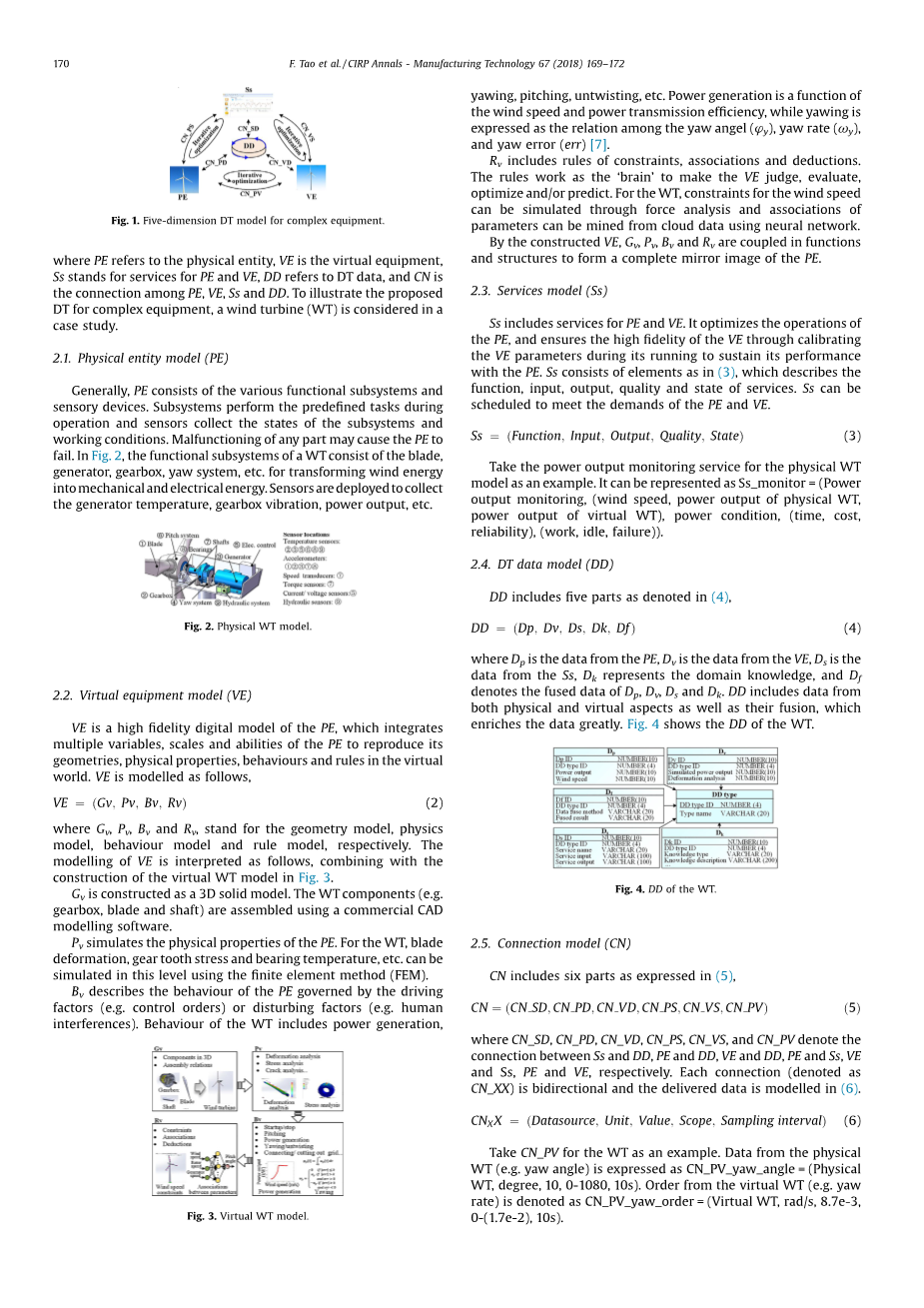
通常,物理实体模型由各种功能子系统和传感设备组成。子系统执行在工作期间的预定任务,传感器收集子系统和工作环境的状态。任何部位的故障都可能引起物理实体模型的失效。在图2中,风力涡轮机的子系统由叶片、发电机、变速箱和调向系统等部分组成,能够将风能转换为机械能和电能。传感器被用于收集发电机温度,变速箱振动,功率输出等数据。
图2 风力发电机的物理实体模型
2.2虚拟设备模型
虚拟设备模型是一个物理实体模型的高保真数字模型,能够结合物理实体模型的多个变量、尺度和性能来在虚拟世界中复制实体的几何形状、物理性质、行为和规则。虚拟设备模型由下述表达式来进行建模;
VE=( Gv,Pv,Bv,Rv)
其中Gv,Pv,Bv和Rv分别代表几何模型、物理模型、行为模型和规则模型。结合图3中虚拟风力涡轮机的构建,虚拟设备模型的建模解释如下:
Gv构建了三维立体模型。使用商业三维建模软件进行风力涡轮机的部件(如变速箱、叶片和轴)的装配。
Pv模拟了物理实体模型的物理性能。对于风力发电机,使用有限元法对叶片变形,齿轮齿应力和轴承温度等在此水平下进行仿真。
Bv描述了受驱动因素(如控制指令或干扰指令(如人类干扰))支配的物理实体模型的行为。风力发电机的行为包括发电量,偏摆,倾斜和松动等。发电量是风速和能量转换效率的函数,偏摆表示为偏摆角度、偏摆速度和偏摆误差之间的关系。
图3 风力发电机的虚拟实体模型
Rv包含了约束、关联和推论之间的规则。这些规则像人脑一样工作,使得虚拟设备进行判断、评估、优化和预测。针对风力发电机,风速的限制可以通过受力分析进行仿真和能够通过互联网从云数据中挖掘关联的参数。通过构建Gv,Pv,Bv和Rv在功能和架构上的联系以形成一个完整的物理实体模型的镜像。
2.3服务模型
服务模型包含了物理实体模型和虚拟设备模型。它优化了物理设备模型的操作,通过校正运行期间的虚拟设备模型参数确保虚拟设备模型的高保真来维持与物理实体模型相同的性能。Ss的组成元素如公式3,描述了性能,输出,输入和服务的质量和状态。Ss能够按照PE和VE的需求进行调整。
Ss=(性能,输入,输出,质量,状态)
以风力发电机的物理模型的功率输出监控服务为例子。可以表示为服务模型=(输出功率监测,(风速,风力发电机物理模型的功率输出,风力发电机虚拟模型的功率输出),动力状态,(时间,费用,可靠性),(工作,空闲,失效))。
2.4数字孪生数据模型
数字孪生数据模型如图4所展示的包括五个部分,
DD=(Dp,Dv,Ds, Dk,Df)
Dp是来自物理实体模型的数据,Dv是来自虚拟设备模型的数据,Ds是来自服务模型的数据,Dk代表的是领域知识,Df代表的是Dp,Dv,Ds和Dk的混合数据。DD包含了来自物理和虚拟两个层面以及它们的混合数据,这极大丰富了数据。图4展示了风力发电机的数字孪生数据模型。
图4 风力发电机的孪生数据
2.5连接模型
如公式5所示,连接模型包括了6个部分,
CN=(CN-SD,CN-PD,CN-PS,CN-VS,CN-PV)
CN-SD,CN-PD,CN-PS,CN-VS,CN-PV分别表示Ss和DD,PE和DD,VE和DD,PE和Ss,VE和Ss,PE和VE之间的联系。每个连接(例如CN-XX)是双向的,传送的数据按照公式6被用于建模。
CNXX=(数据源,单位,数值,范围,抽样间距)
以CN-PV为例子,来自风力发电机物理实体的数据(例如偏摆角度)被表达为CN-PV偏摆角度=(风力发电机物理实体,角度制,10,0-1080,10s)。来自虚拟设备的数据(例如偏摆角度)被表达为CN-PV偏摆角度=(风力发电机虚拟模型,弧度制,8.7e-3,0-(1.7e-2),10s)。
3数字孪生驱动的故障预测与健康管理方法
如图5所示,数字孪生模型的建立被用于创建数字孪生模型驱动PHM方法。在这个方法中,故障被分为渐发性故障和突发性故障。前者由部件逐渐性失效导致的能够进行预测。后者由于干扰而突然发生无法进行预测。
图5 基于数字孪生驱动的PHM方法的框架和流程
在图5中,工作流程被分为了三个部分,观察(1-3步),分析(4-6步)和预测(7步)。
第1步:数字孪生模型的建立和校正。按照第二节的内容建立复制机电设备的数字孪生模型。如果虚拟设备模型与物理实体模型之间有偏差,这里有两种方法消除这种偏差:(1)通过基于最小二乘法的参数整定方法校正虚拟设备模型;(2)维持CN-PV的联系来增强物理实体模型和虚拟设备模型之间的实时交流。
第2步:模型仿真与交互,设X={}和C={}表示从物理实体模型收集到的实时状态和工作环境,表示第i个现实状态(例如速度,转矩,应力),表示第j个状况(例如环境,负载,控制指令),n和m表示元素的数量。加载X和C到虚拟设备模型进行初始化和仿真,虚拟实体模型的输出表达为Y={}和Z={},其中是的映射,表示第i个仿真状态,表示另一个分析结果(例如压力分析),n和l表示元素的数量。物理实体模型和虚拟设备模型保持互相交互确保两者都达到最新的状态。
第3步:一致性判断。从X和Y中选择t元素。用)和分别表示物理实体模型和虚拟设备模型目前的状态(假定为),其中属于X,属于Y。如果,其中是预设阙值,物理实体模型和虚拟设备模型保持一致性,意味着在可容忍的差异范围内可以造成一些干扰波动(例如真实环境的干扰)。接下来就是第4步。否则的话,它们无法保持一致则跳到第5步。
第4步:失效检测。随着物理实体模型的运行,会出现性能退化。这可以通过X,Y和Z指示器的表达来反映。如果一些指示器的数值超过了阙值,则物理实体模型开始逐渐失效,随着失效的累积将会出现渐发性故障,需要进行第6步操作,否则回到第2步操作。
第5步:不一致引起的判断:采集相同条件下物理实体模型历史状态的时间序列作为参考来决定是物理实体模型还是虚拟设备模型引起的不一致。用来表示这个参考值,其中t表示元素的数量,表示第i个部件的时间序列,表达式为以及其中s表示元素的数量。按照以上情况,在和中的第i个部件,在目前()和下一个阶段()的时间序列分别表达为和。将和的时间序列表示为和。按照基于关联的动态时间整经纬方法,测量和、和的相似度。如果和相似的话,则是由物理实体设备突发性故障引起的不一致,由于虚拟设备模型难以知道突发性故障。如果和相似的话,则是由模型缺陷引起的不一致,则跳到第1步。如果和都与不相似,则回到第1步重新进行模型校正。
第6步:故障原因的识别与判断。按照第4和第5步的内容分为如下所述的两种情况:
(1)渐发性故障:从第4步来说,在完全失效之前,定位故障原因。它包含了两种可能性,在训练阶段中,从X,Y和Z的历史数据中提取预警特征,然后训练预测模型通过神经网络的方法融合特征并将其与故障原因联系起来。在预测阶段中,将来自X,Y和Z实时数据的输入特征放入训练模型进行预测故障原因。
(2)突发性故障:按照第5步,首先定位导致突发性故障的部件。然后通过比较虚拟设备模型和物理实体模型的参数逐个检查部件来识别出导致故障的干扰源。
第7步:维修策略。按照故障原因,从一系列的备用方案中选择维修策略。先在虚拟设备模型中执行维修策略来进行校验,然后在物理实体模型上执行。
图5中展示了每个流程,该方法通过相应的服务来实现功能(例如不一致判断,预测故障原因,校正)。工作过程中的数据被储存在了数字孪生数据模型中,它们在处理(例如数据融合)之后被发送回来驱动这些步骤。与此同时,远程设备的数据也不断进行更新。
总而言之,在故障预测与健康管理过程中必须考虑现实和虚拟两个方面融合来自物理实体模型和虚拟设备模型仿真的信息。准确的预测在故障预测与健康管理中特别重要。对于数字孪生模型,预测主要影响以下几个方面。(1)物理实体模型和虚拟设备模型之间的误差表现出不一致和提供出现潜在故障的标志。(2)完整获取和融合来自物理实体模型和虚拟设备模型的信息,能够更加精确进行预测。
4案例分析
4.1问题描述
风力发电机作为将风能转换为电能的复杂设备。一台风力发电机被设计具有随机负载、变化转矩和恶劣环境的工作条件下使用数十年,其运行过程中,每个部件都可能会失效。然而在任何时间都接近风力发电机是不实际的。按第2节内容构建的风力发电机数字孪生模型能够解决这个问题通过第3节提到的数字孪生驱动的故障预测与健康管理方法。
在图2中的第二部分变速箱作为风力发电机中最容易失效的部分。它的失效主要是由逐渐退化造成的。本节考虑将变速箱作为例子
全文共7316字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[875]

