
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
748 ieee控制系统技术交易,第一卷。26,不。2,2018年3月
电动助力转向系统的控制器设计
Dongwook Lee,Kyung-Soo Kim,IEEE会员和Soohyun Kim
摘要 - 本文简要介绍了一种分析电动助力转向(EPS)系统控制器稳定性和设计的新方法。设计转向系统时最重要的任务是使驾驶员对转向感感到满意。转向感觉的方式取决于辅助扭矩图。辅助扭矩图是感测到的驾驶员扭矩和辅助电动机扭矩之间的一对一映射的关系,其随着车辆速度而变化。然而,由于高水平的转向辅助增益性和扭矩图的非线性,辅助扭矩图不能单独应用到EPS控制器中。扭矩图的两个元素都可能导致不稳定性,这会导致转向系统的振动或发散。因此,EPS系统设计总是需要有稳定补偿器和辅助扭矩图。设计补偿器的目的是使系统稳定并减弱任何不适宜的振动。本文介绍了EPS系统的机械模型,并演示了识别模型参数的方法。基于EPS模型,分析了具有近似线性扭矩图和非线性扭矩图的系统的稳定性。此外,建议设计稳定补偿器的标准。在模拟中应用具有不同参数的超前滞后补偿器和扭矩图,并且执行车辆实验以验证理论分析。
索引条款 - 控制器设计,电动助力转向(EPS),稳定性分析,系统非线性。
I. 介绍
ELECTRIC动力转向系统(EPS)是一种电机驱动的动力
转向系统,可为驾驶员提供帮助具有轻巧方便的转向感。今天,大多数乘用车都配备了EPS系统,以支持驾驶员而不再应用液压动力转向系统,因为它具有许多优点[1]。这些优点包括高燃料效率,紧凑的体积,易于调节转向感,以及将系统与车辆中的其他电控系统相结合的能力,例如电稳定性控制。
扭矩图是EPS控制器的主要元素;它决定了电机有多大的转向扭矩。扭矩图在测量的驱动扭矩和来自马达的辅助扭矩之间是非线性递增函数。扭矩图的形状决定了驾驶员的转向感 [2]。通常,当速度为零时,扭矩图的斜率是最陡的,然后是
手稿于2016年12月15日收到;2017年2月20日接受。日期出版物2017年3月24日;当前版本的日期2018年2月8日。稿件于2017年3月2日收到最终形式。副编辑K. Butts推荐。
作者是韩国高等科学技术学院机械工程系,韩国大田305-701(电子邮件:kyungsookim@kaist.ac.kr)。
本文中一个或多个图的彩色版本可在线获取http://ieeexplore.ieee.org.
数字对象标识符10.1109 / TCST.2017.2679062
随着速度的增加而减小,因为当车辆停止时转向所需的扭矩是最大的,但当车辆快速行驶为了实现稳定性,驾驶员需要感觉更重的转向感。低速下的高水平控制器增益和扭矩图的非线性可能是系统中不稳定和振动的根源[3],[8];因此,除了扭矩图之外,还需要稳定补偿器来完成EPS控制。然而,由于多种原因,为EPS设计合适的控制器已成为一个具有挑战性的问题[4]。在存在任何未建模的动态和参数不确定性的情况下,控制器需要是鲁棒性的。参数调整可能具有挑战性,因为即使对于相同类型的车辆,每辆车的系统参数也可能有一些变化。此外,由于转向系统与敏感的人手相互作用,良好的控制器设计应该消除不适宜的振动。
已有许多研究表明各种形式的EPS控制器使系统稳定。参考文献[5]提出了基于EPS模型的稳定条件,并利用固定结构补偿器来稳定系统并使扭矩振动最小化。参考文献[6]使用频率加权阻尼补偿器来增加系统的相位裕度,但相位裕度的增加范围受到限制。参考文献[7]采用H-infinity控制来辅助扭矩,改善转向感,并增强闭环鲁棒性。限制是所提出的H-infinity控制具有非常高的阶数并且不能消除振动。参考文献[8]提出了一种强大的整体滑模控制器,用于产生辅助扭矩,稳定系统并改善EPS阻尼特性。参考文献[9]提出了一种用于双小齿轮EPS的最佳线性二次型调节器控制器。
以前关于EPS控制器设计的研究有一些局限性。首先,大多数研究将非线性扭矩图近似为简单的线性增益,而不分析非线性对系统稳定性的影响。线性化系统仅表示工作点附近的动态特性,系统的非线性元件经常引起独特的现象,这在线性系统中是不可能发生的。即使线性化系统稳定,扭矩图等非线性元件也会导致不稳定,这与系统的发散或剧烈振动直接相关。其次,所提出的控制器仅通过模拟或台架测试进行验证。模拟和台架测试是非常有限的环境,并不能反映实际车辆的所有特征。计算机模拟不表示系统的未建模动态。此外,在模拟和台架测试环境中,很难重现从道路上作用到轮胎的反作用力。
1063-6536copy;2017 IEEE。允许个人使用,但重新发布/再分发需要IEEE许可。
看到http://www.ieee.org/publications_standards/publications/rights/index.html 欲获得更多信息。
|
LEE等人:电动助力转向系统的控制器设计 |
749 |
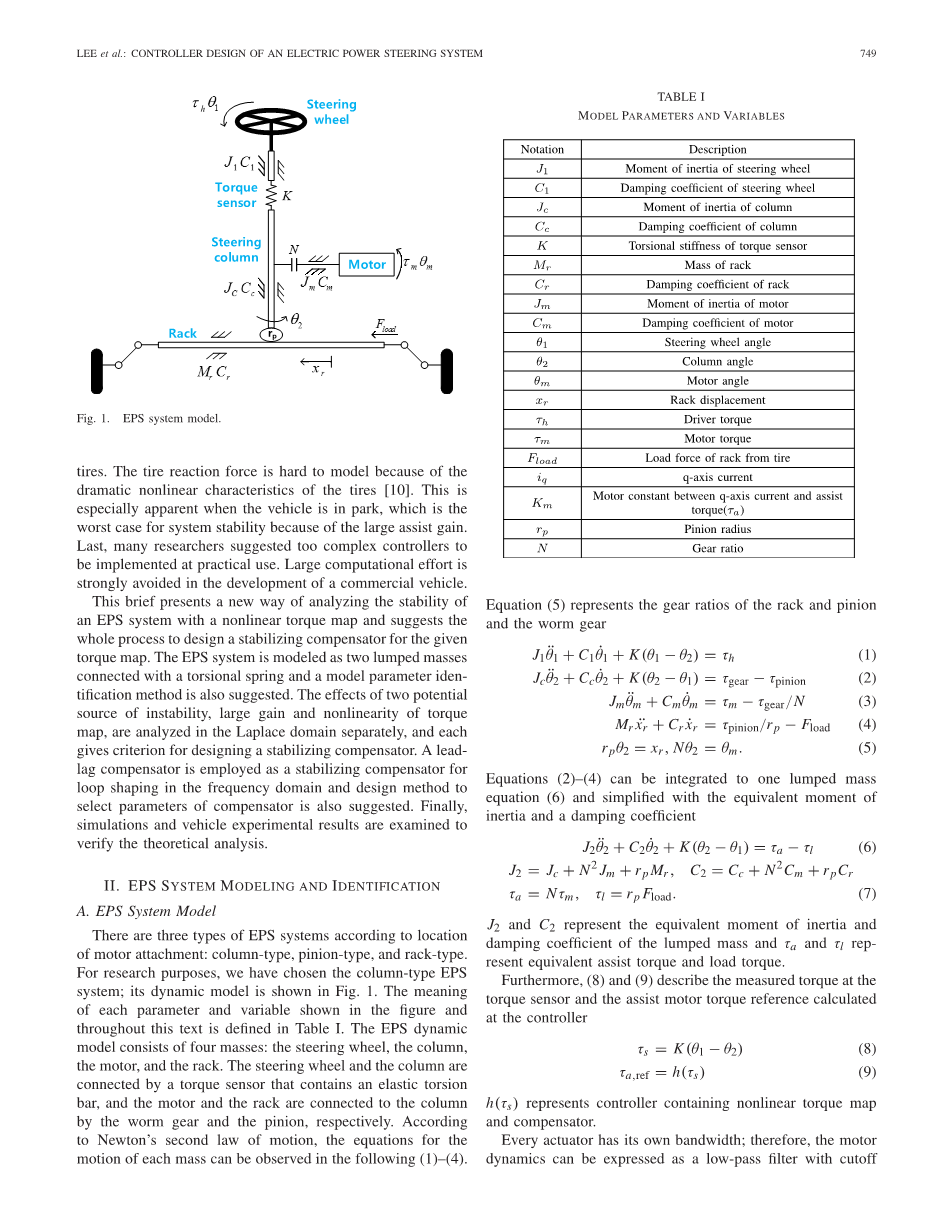
表Ⅰ 模型参数和变量
方向盘
扭矩传感器
转向柱
电机
齿条
图1. EPS系统模型
由于轮胎具有显着的非线性特性,轮胎反作用力很难进行建模[10]。当车辆处于停车状态时尤其明显,由于辅助增益较大,这是系统稳定性的最坏情况。最后,许多研究人员建议在实际使用中实施更复杂的控制器。在商用车辆的开发中强烈避免了大的计算量。本文介绍了一种利用非线性扭矩图分析EPS系统稳定性的新方法,并为给定扭矩图设计了稳定补偿器的整个过程。EPS系统被建模为与扭转弹簧连接的两个集总质量,并且还建议了模型参数识别方法。分别在拉普拉斯域分析了两个潜在不稳定源,即大增益和扭矩图非线性的影响,并给出了设计稳定补偿器的标准。采用超前滞后补偿器作为频域环路整形的稳定补偿器,并提出了选择补偿器参数的设计方法。最后,对模拟和车辆实验结果进行了检验验证理论分析。
-
- eps系统建模和识别
A. EPS系统模型
根据助力电机位置EPS系统分为三种类型的:转向柱式,小齿轮式和齿条式。出于研究目的,我们选择了转向柱式EPS系统;其动态模型如图1所示。图中所示的每个参数和变量的含义见表I.。EPS动态模型由四个组件组成:方向盘,转向柱,电机,和机架。方向盘和转向柱通过包含弹性扭杆的扭矩传感器连接,并且马达和齿条分别通过蜗轮和小齿轮连接到转向柱。根据牛顿第二运动定律,可以在下面的(1) - (4)中观察每个组件运动的方程。
等式(5)表示齿条和小齿轮与蜗轮的齿轮比
J1theta;uml;1 C1theta;˙1 K(theta;1 -theta;2)=tau;h (1)
|
Jctheta;uml;2 Cctheta;˙2 K(theta;2 -theta;1)=tau;齿轮- tau;小齿轮 |
|
|
(2) |
|
|
Jmtheta;uml;m Cmtheta;˙m =tau;m - tau;齿轮/ N |
(3) |
|
Mr xuml;r Cr x˙r = tau;pinion/rp minus; Fload |
(4) |
|
rptheta;2 = xr,Ntheta;2 =theta;m。 |
(5) |
等式(2) - (4)可以集成到一个集总质量方程(6)中,并用等效转动惯量和阻尼系数进行简化
J2theta;uml;2 C2theta;˙2 K(theta;2 -theta;1)=tau;a - tau;l (6)
J2 = Jc N 2 Jm rp Mr ,C2 = Cc N 2Cm rp )Cr
tau;a =Ntau;m,tau;l = rp F加载。 (7)
J2 和C2 表示集中质量的等效惯性矩和阻尼系数,tau;a 和 tau;l 表示等效辅助扭矩和负载扭矩。
此外,(8)和(9)描述了在扭矩传感器处测量的扭矩和在控制器处计算的辅助马达扭矩参考
|
tau;s = K(theta;1 minus; theta;2) |
(8) |
|
tau;a,ref = h(tau;s) |
(9) |
h(tau;s)表示包含非线性扭矩图和补偿器的控制器。
每个执行器都有自己的带宽;因此,电动机动态可以表示为具有截止的低通滤波器.
750 ieee控制系统技术交易,第一卷。26,不。2,2018年3月
图2. EPS系统的框图。
表Ⅱ系统识别实验条件
图3 实验结果和传递函数的theta;2/tau;s幅度的波特图。
频率omega;m
|
tau;a |
omega;m |
|||
|
= s omega; |
= Gm(s). |
(10) |
||
|
tau; |
||||
|
a ,ref |
m |
|||
图2显示了整个EPS系统的框图,该系统描述了系统从外部输入(驾驶员扭矩和道路干扰)到系统状态(手柄和柱角)的流量。
B. 模型参数识别
基于模型的控制器始终需要系统标识来确定模型参数的值。用于精确系统识别的方法与开发良好系统模型一样重要。这是因为没有建模参数值,控制器设计的良好模型是无用的。
为了识别参数值,我们将各种频率的电机励磁的系统响应与模型的系统传递函数进行比较。车辆具有提升和自由操作条件,以确保除了电机扭矩(tau;l 0和tau;h 0)之外没有外部扭矩。在这些条件下,电机以不同频率的正弦输入激励系统,柱角,电机电流和转矩传感器值都作为系统输出变量测量。表达了实验条件在表II中。通过升力(tau;l = 0)和自由处理条件(tau;h<!-- 全文共11462字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[343],资料为PDF文档或Word文档,PDF文档可免费转换为Word

