英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
面向三维结构的仿生结构设计多旋翼无人机
Luke Henderson, Twain Glaser and Falko Kuester
CISA3 DroneLab
Jacobs School of Engineering
University of California San Diego 9500
Gilman Drive MC 0436,USA
{lwhender, tglaser, fkuester}@eng.ucsd.edu
摘要—本文探讨了用仿生设计策略来指导一个3D打印的结构设计,可折叠和弹道部署,多旋翼无人飞行器(UAV)平台。在运输和发射过程中折叠无人机可以在空中改变其形状从流线型弹丸到多旋翼机身,使快速有效载荷部署和机动性。无人机设计的整体机身的制造技术是3D打印技术的背景下,多个运动部件容纳在一个平台上,它必须保持精简和灵活,适合六英寸直径的发射筒,能承受发射加速度可达50g。为了评估可行性进行了分析,包括应力有限元模拟空气动力试验及力学模型。最新的工作模式包括3D打印,创造一个紧凑,强大和独立的平台,利用它的能力设计调整和制造复杂的几何形状和完全组装的系统在一个小的时间和成本预算。无人机的设计有利于在有挑战性的条件下进行部署,允许它从地面发射或从另一架飞机发射升空,然后在预先设定的高度展开,地面或其他障碍物除外。这种能力的应用如远程探测和灾后救援是非常有用的。
1简介
多旋翼无人飞行器(UAV)广泛流行于业余爱好者和专业人士之间,一个已经从玩具到全功能的成像平台。传感器平台很容易被用于摄影、摄像、多光谱和高光谱成像等领域的探索和应用生态系统监测、精细农业、建筑、基础设施管理、灾害和灾后应急和救济,以及远程站点的探索。然而,目前的平台常常由于飞行前组装的需要和清晰的发射窗口的可用性而受到限制。
图1 The GLAD无人机的配置。
例如,一个适度密集的森林冠层将作为一个实用的传统平台的天花板,平台升降机和控制依赖于通畅的转子。 无人机已被广泛研究用于远程勘探,包括考古遗址的文献[ 1 ]。结合地面诊断成像方法[ 2 ],以产生高质量三维模型的文化重要的环境和工件[ 3 ],小型多旋翼无人机,尤其是证明了数据收集的宝贵。一个挑战是,它们必须从靠近感兴趣地点的开阔区域发射。另一方面,较大的飞机,可以携带更大的传感器有效载荷,如激光雷达扫描仪[ 4 ]在更大的距离,但可能难以现场部署。The GLAD(地面发射和空中部署无人机目标)之间的桥梁,这些平台的差距通过引入一个能从流线型弹体形状为多旋翼飞行器过渡迅速重新配置的飞机,在飞行中,这可以让The GLAD从地面发射,或者通过“母飞机”从上面插入目标环境。特别是,它的穿透稀疏的地面覆盖能力,如在没有空地可用区域的树冠,在野外工作,在部署之前,创造了独特的机会。本文介绍了一种基于芽接花的无人机的仿生结构设计(图1)。类似于莲花,无人机的双臂从流线型的外形塑造成了一个典型的无人机平台multirotor模仿。莲花花瓣最初近似于蕨类状的三维结构,随后在底部进一步平滑。折叠后egglike形状必须能够承受发射加速度达50g,一个设计要求,通过迭代求精,让形式追随功能解决。由聚乳酸(PLA)和尼龙制成,GLAD平台可以用熔融沉积建模(FDM)技术,与大多数消费水平的3D打印机相同,可容纳多个运动部件轻量化设计三维打印。3D打印技术允许快速迭代设计、建模、和测试平台,在折叠的状态下可从地面6英寸管高度25m推出制造,然后过渡到自行部署,船上的惯性测量单元(IMU)和GPS数据。虽然迭代设计掩盖了它的某些植物特征,但它仍然保留了自然界所激发的许多特性。有限元分析的定量背景(FEA)用于评估的 GLAD无人机结构系统技术,以及关于仿生设计过程的背景信息是在2节中描述的,其次设计的气动和电子点定量验证结果从结构、机械来看。第4节讨论了各种可能的应用程序,而第5节讨论了 GLAD平台的潜在改进。
2背景
仿生学的概念和工程本身一样古老,包括采用天然生物形态和机制设计,演化的成千上万的迭代设计[ 5 ]所产生的效益。然而,模仿自然需要创造复杂的有机形状的能力,这使得他们很难用普通的制造方法,直角和直边是正常的,一个很容易解决的三维打印技术问题。结合的成本是独立的复杂性[ 6 ]制造3D打印的独特性能,采用仿生学是为了GLAD最大限度地提高效率并减少重量的设计开始。无人机通过许多设计迭代已经失去了它的相似性,一个特定的自然物体,许多部分和细节组成的结构是基于形状或概念的生物资源。“鸡蛋”形状的选择,从一开始,因为它具有的影响[ 7 ],在顶部的进化选择结构的弹性,巨大的空气动力特性。雄蜂(电池、处理器)中的核心部件包含在半独立平台上的固定外壳内。外壳是由尼龙支柱分开的,其目的是使这些变形和弯曲在重大冲击事件中,结构完整性的重要性超过结构刚度。这种方法的灵感来源于脊椎动物保存自己的处理器、大脑的方式。通过将脑悬浮在固体头盖骨中的脑脊液中,脊椎动物可以保护这一最重要的器官免受休克和穿刺伤(8)。其他采用仿生学设计中仍然存在包括螺旋桨整流罩与光叶像脉络为tendonlike松紧带提供了空间高效、快速的手臂的部署方法灵活和轻量级的螺旋桨的保护和使用。由于平台的高结构应力使其能够承受,因此需要通过不同的方法进行严格的设计验证。
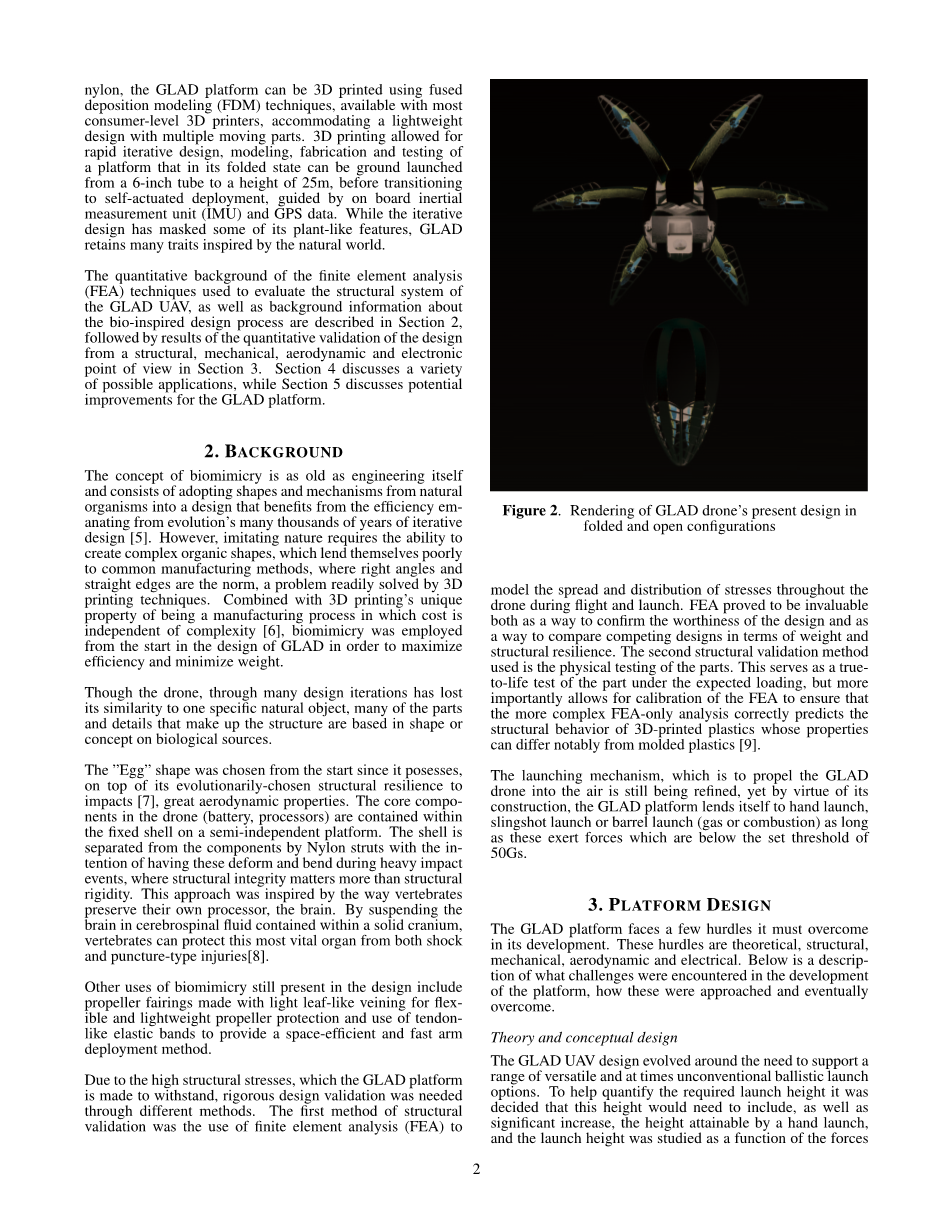
图2 GLAD无人机的指尖设计中的开度和配置
结构验证的第一种方法是使用有限元分析(FEA)。在飞行和发射过程中模拟整个无人机的应力分布。有限元分析被证明是非常有价值的,既是确认设计价值的一种方法,也是比较竞争设计在重量和结构弹性方面的一种方法。第二种结构验证方法是对零件进行物理测试。这是一个真实的寿命试验的部分预期,更重要的是允许的有限元分析以确保更复杂的有限元分析正确预测的3D打印的塑料的性质可以不同,特别是成型塑料[ 9 ]的结构性能标定。推动无人机到空中仍在不断完善,但凭借其建筑的平台本身的发射,发射筒发射弹弓或(气体或燃烧)时,只要这些发挥低于50gs设定阈值的力量就行。
3平台的设计
The GLAD平台在发展过程中必须克服一些障碍。这些障碍包括理论、结构、机械、气动和电气。下面描述了平台开发过程中遇到的挑战,这些挑战是如何得到解决并最终克服的。理论与概念设计,令人高兴的无人机设计是围绕着支持多种通用和非常规弹道发射选项而展开的。为了帮助量化所需的发射高度而决定了这个高度需要,并且显著增加,和发射高度的研究作为一个具有高度的力量实现对平台的功能。由于平台中的应力是由加速度引起的,而不是由目标高度本身引起的,所以必须考虑发射方法。考虑到实际应用和目标应用等因素,在一米长的发射筒假设恒定加速度的基础上,确定了发射应力和发射高度。通过强调这在其他因素如空气阻力(阻力)和吸收的能量通过变形,平台上的预期下估计可以作为一种理想的发射高度的函数,考虑到动能和势能推出抛物线轨迹的最高点:
当:M = Drone mass V =筒出口速度=radic;2lowast;一lowast;Glowast;lbarrel G =引力常数 a平均加速度系数(GS)H =最大高度。简化和假设枪管长度为1米,我们得到:h = a。这意味着,我们的理论发射高度(M)只是在单位长度枪管上的平均应用加速度系数g的值。这个信息在手,清除障碍的小建筑物或高大树木的大小的意图,目标设定在50gs保守的能力,从而使一个与安全系数225米的理论发射高度。当然,这种发射高度不考虑空气摩擦和变形等因素,因此在给定的加速度下,预计实际发射高度较低,这是安全系数有助于说明的一个差异。这种加速也符合一些气体动力发射器,如“马铃薯加农炮”(10),被认为是未来潜在的发射平台。定义了无人机的基准载荷后,进行了概念设计,如前所述,留存的设计允许从一个鸡蛋的过渡形弹丸一通过hexacopter配置通过展开或手臂,使外壳折叠的部分。所部署的平台在一个“推”的配置中,通过向下的螺旋桨提供升力。这项决定是为了让飞行载荷把机身推入稳定平衡的位置,防止过早地折叠飞行器,但能量消耗不大。在发射过程中,无人机是用双臂推动的,这样的力量将首先转移到武器,使这些弯曲沿他们的外倾角和缓冲的影响类似于“钢板弹簧”悬挂在一些车辆上。从那里,把胳膊抱在身体上的销钉把载荷传递到主壳上,“拉”它向前,同时确保在发射过程中薄而易弯曲的外壳保持张力。最后,载荷通过可变形的尼龙支柱传递到组件。通过这种结构布局,核心电气元件是最后一次暴露于发射能量。当发射筒,弹托可以提供帮助分散力均匀地之间的所有武器以及确保接近弹和筒壁之间的密封。这也将有助于减少实弹发射载荷变形的初始冲击[ 11 ]。对武器结构的有限元分析进行了验证设计,因为武器是最脆弱的结构设计的一部分,因为它们包含的材料比外壳少,并受到轴向和弯曲载荷不同于后者。第一种分析是两种不同手臂设计的并排比较。这些比较旧版本的ARM设计到最近的一个意图验证最大载荷有限元模拟。双臂重量大致相等,这也验证了新设计的相对结构效率。武器在飞行载荷条件下进行测试,在这种情况下,马达推力上施加的载荷代表马达推力,而手臂在飞行过程中受到限制。飞行载荷计算如下:
Where:
Fflight = Applied force per arm W = Drone weight =11 Newtons
aflight = Upwards acceleration factor =2 Resulting in:
Fflight asymp;3.7 N
每个臂的结果简要总结如下:正如这些结果所表明的,有限元分析证实了最新的ARM设计的结构优势,它被评为具有1.5倍的能力和2.3倍的刚度相同重量的设计。利用这一信息,对这两个模型进行了物理试验,以评估实验刚度,从而测量有限元预测的准确性。设置用于模仿推力载荷称重下的motorattachment平台。记录了两个臂的挠度,并根据荷载的斜率和下面的变形图得出了刚度:物理实验产生的新手臂的老胳膊和1200克/厘米500克/厘米的刚度值,给出一个比2.4分的刚度应接近2.3的有限元刚度比,从而确定手臂能安全地承受飞行载荷。 在验证有限元分析用于结构仿真的目的之后,对电机臂在发射载荷下进行了分析。在推出的ARM的荷载沿轴(折)臂和分布在外表面上的模拟负载被脱壳蔓延。负载计算如下:
图3 有限元挠度结果摘要
图5 发射臂的有限元分析结果。
这种载荷对手臂造成最大的危险,但证明了它有能力抵挡发射。
Where:
Flaunch = Applied force per arm W = Drone weight =11
Newtons alaunch = Design acceleration =50
Plugging in the assumed values, we get:
考虑了各种类型的机制:个人允许武器独立控制,压缩空气系统,但这些太繁琐,太弱,太耗电或太复杂,因此最简单的想法是保留。目前的设计有武器的前部分由内部松紧带预张力试图迫使他们打开,由5毫米高的楔子突出的平台帽。这个帽子是半独立的外壳,允许它沿着弹丸运动轴几毫米。当位于电磁阀中心的平台,激活一个小推杆,盖推着几毫米,收缩阻碍手臂,从而导致楔子的开放。由于无人机的推进飞行配置,弹性带只起到打开武器的作用,直到螺旋桨开始产生推力,才迫使武器停留在开放的配置中。每次飞行前都要用手完成。下面是这个机制在行动中的例证:
图6 从发射到飞行模式的愉快过渡。
这一机制的建立和测试在地面上(下图)和空中测试如下。测试证实了The GLAD的平台的能力,从它的弹道配置转换到飞行配置使用车载电源。
图7 The GLAD(左)折叠发射和(右)展开飞行配置。
气动试验
平台设计的另一个问题是它的气动性能。由于动力飞行配置中平台的多旋翼布局,飞行状态不被视为处于开放状态。然而,成功和稳定的弹道飞行平台的关键是最大限度地提高高度,效率和成功部署的平台,因此需要认真考虑。由于改变平台的空气动力学要求改变最主要的设计,在设计过程结束时完成模型的弹道飞行试验被认为是无效的。为此,创建了一个虚拟模型,该模型完全由塑料制成,具有与当前设计相同的外部形状,但具有不同宽度的厚壁,以正确地解释从虚拟模型中移除的各种电气和机械部件的质量和重心。这种方法可以方便地制造和抛弃测试平台。由于飞行特性是不容易量化的,所以这些测试只是简单地通过将模型抛向空中并获得空气行为的感觉来完成。人们发现它是手工发射的,GLAD平台像足球形状一样借给本身以及诱导的自旋,导致在空气中稳定的飞行。但是如果没有这个自旋,这很难引起枪管发射,螺旋桨产生小的阻力整流罩,使平台容易翻滚。
图8 定性飞行试验建立弹道飞行行为。
这些试验表明散热片或类似的draginducing整流罩上的平台是稳定飞行的必要性。由于解决方案的相对简单性和为火箭发射专门设计部件的必要性,这种改进将在手动发射、空气开启和飞行成功演示后达成,并商定一种特定的发射方法。
图9 自旋稳定的鳍概念。
飞行软件开发
成功实现飞行和部署平台的最后一步是开发一个飞行控制系统。控制系统的设计结构和电在BEAGLEBONE黑色以及由Strawson设计了机器人的斗篷。GLAD的软件环境是相同的在UCSD dronelab用来保持相互操作性。它使用脉宽宽度与速度控制器通信,飞行软件在同一个架构下运行,一个典型的业余飞行爱好者可能除了几个调整链接自由下落,检测与发射的电磁阀负责展开六臂。在短暂的飞行协议校准所有的速度控制器和组件,等到加速度传感器检测到在Z方向的加速度,
全文共9652字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16656],资料为PDF文档或Word文档,PDF文档可免费转换为Word

