
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
多线履带式攀登系列机器人
李久镛、金煌、徐坤、金俊文韩国首尔国立大学稳健设计工程实验室,首尔151 - 019
梅廷庭,纳米机器人实验室,卡内基梅隆大学,宾夕法尼亚州匹兹堡15213 - 3890和马克斯-普朗克智能研究所系统,70569斯图加特,德国
泰原徐,韩国庆尚夜南大学创意机器人设计实验室712 - 749
攀爬机器人已广泛应用于许多涉及难以进入,危险或危险环境的行业,以取代人类工作者。 攀爬速度,有效载荷能力,克服障碍的能力以及墙壁到墙壁的过渡都是攀爬机器人的重要特征。 在这里,多连杆履带轮式攀爬机器人被提出来增强这些特征。 机器人已经与三所大学合作开发了五年:首尔国立大学,卡内基梅隆大学和岭南大学。 针对不同应用提供了四种类型的机器人,具有不同的表面附着方法和机制:用于室内场地的MultiTank,用于重工业场地的柔性履带式机器人(FCR)和Combot以及用于高层建筑的MultiTrack。 对于每个机器人和应用来说,表面附着的方法是不同的,并且根据给定的机器人的要求将链接之间的关节的特征设计为主动或被动。 报道了这种攀爬机器人类型的概念设计,实际设计和控制问题,并且对于不同表面材料,机器人尺寸和计算机的成功的多链轨道轮式攀爬机器人来说,适当选择附着方法和关节类型是必不可少的成本。 OC 2014威利期刊,Inc.
1.介绍
几十年来,移动机器人已经发展到帮助人类。 作为这一趋势的一部分,攀爬机器人已经被研究用于涉及难以进入,危险或危险环境的各种人类任务。 这些机器人可用于探索室内或室外环境(Murphy,Kute,Mengu-c&,Sitti,2011;Sintov,Avramovich和Shapiro 2011),检查管道或桥梁(Park,Hyun,Cho,Kim,&Yang ,2011; Qiao,Shang,&Goldenberg,2013)和清洁高层建筑(Zhang,Zhang,Wang,Liu&Zong,2007; Zhang,Zhang,Zong,Wang and Liu,2006)。 对于这些攀爬机器人的应用任务,三个主要的机器人特征至关重要。 首先是攀登速度。 机器人应该有高速运动以提高工作效率。 第二个特点是有效载荷容量。 这个特性被重新设计因此可以为特定任务携带各种设备,并确保机器人的高度安全性和稳定性。 第三个特点是能够克服各种类型的地形。 各种三维(3D)障碍物存在于环境中,包括从墙到墙的过渡。 机器人应该能够越过这些障碍。
我们引入具有这些所需能力的多链路履带式(MCT)型攀爬机器人。 MCT机器人的主要特点是由串联模块组成的结构。 MCT机器人可通过串联模块的顺应关节运动实现高克服能力,包括从墙到墙的过渡和障碍物的克服。 MCT机器人还可以通过连续移动履带履带实现高速运动。 而且,由于其附着表面大,所以它具有高的有效载荷。
建议使用四个MCT型机器人,如图1所示。每个机器人专门用于不同的应用领域。 MultiTank被开发用于室内环境。 柔性履带式机器人(FCR)和Combot被开发用于重工业领域。 MultiTrack是为在高层建筑上运行而开发的。
表一爬升机器人类型的爬升速度,有效载荷能力和克服能力的定性比较。
类型 腿 双轮驱动 毛虫 翻译 电缆驱动 MCT人物和
名
W-Climbot(Bi等,2012; Guan等,2013)
Magnebike(卡普拉里
等人,2012; Tache等,2009)
Kim等人 (Kim等人,2008)
Skycleaner III(Zhang等人,2006,2007)
ROPE RIDE
(Seo等,2013)
Combot(Lee,Wu,Kim,Kim,&Seo,2012; Lee,Wu,Kim,&Seo,2012)
速度 minus; minus; 有效载荷容量 minus; 障碍 minus; minus;
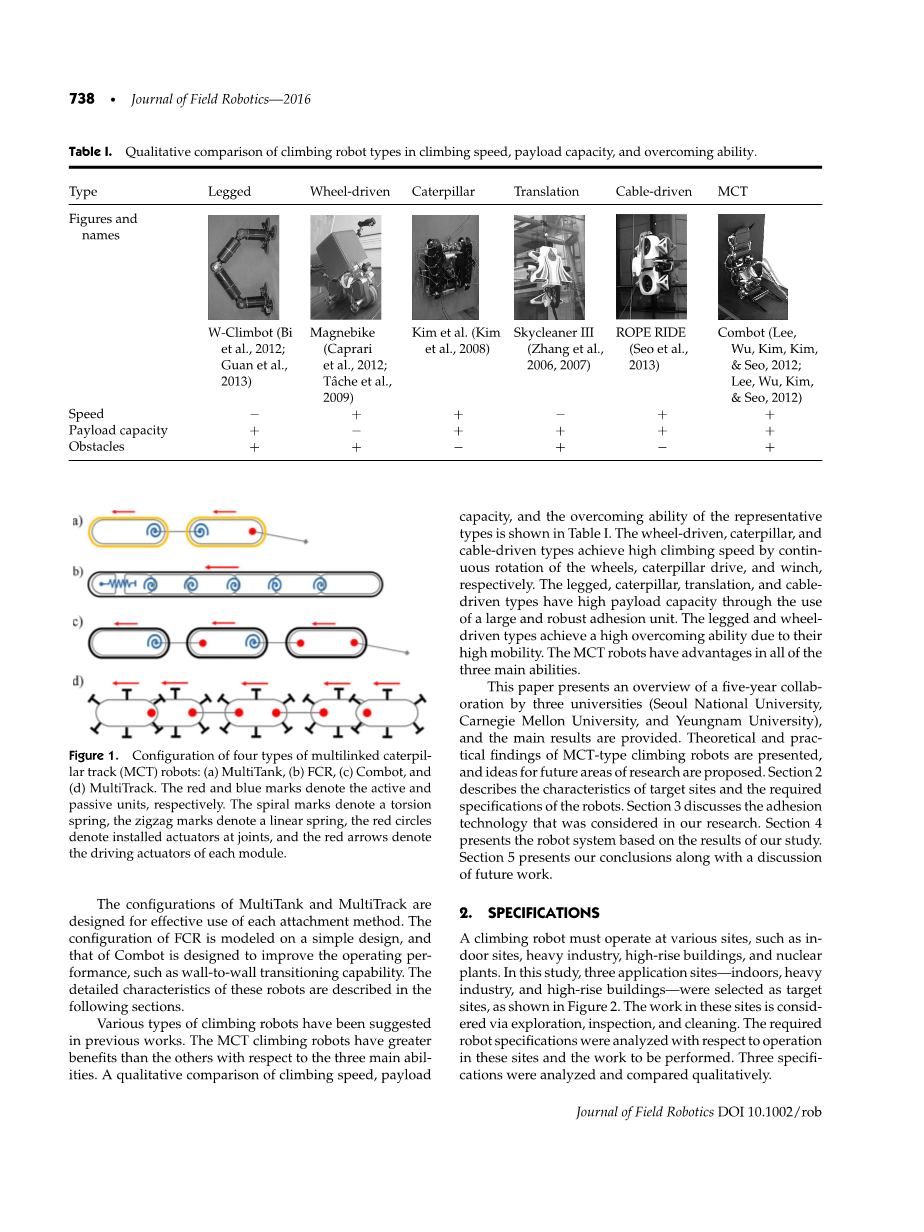
图1.四种类型多链路履带式(MCT)机器人的配置:(a)MultiTank,(b)FCR,(c)Combot和(d)MultiTrack。 红色和蓝色标记分别表示主动和被动单位。 螺旋标记表示扭簧,曲折标记表示线性弹簧,红色圆圈表示安装在关节处的执行器,红色箭头表示每个模块的驱动执行器。
MultiTank和MultiTrack的配置旨在有效使用每种附件方法。 FCR的配置基于简单的设计进行建模,而Combot的配置旨在提高操作性能,例如墙到墙过渡能力。 以下部分将介绍这些机器人的详细特征。
在以前的作品中已经提出了各种类型的攀爬机器人。 在三种主要能力方面,MCT攀爬机器人比其他机器人具有更大的优势。 攀登速度,有效载荷的定性比较容量和代表类型的克服能力如表1所示。车轮驱动型,履带驱动型和电缆驱动型通过车轮,履带驱动装置和绞车的连续旋转分别实现较高的爬升速度。 通过使用大而坚固的附着单元,有腿,履带,平移和缆绳驱动类型具有高有效载荷能力。 由于它们的高机动性,腿式和轮式驱动类型具有很高的克服能力。 MCT机器人在三种主要能力中都具有优势。
本文概述了三所大学(首尔国立大学,卡内基梅隆大学和岭南大学)为期五年的合作,并提供了主要成果。 提出了MCT型攀爬机器人的理论和实践研究成果,并提出了未来研究领域的设想。 第2部分描述了目标站点的特征和机器人的所需规格。 第3节讨论我们研究中考虑的粘附技术。 第4节介绍了基于我们研究结果的机器人系统。 第5节介绍了我们的结论和对未来工作的讨论。
2.规格
攀爬机器人必须在各种场所运行,例如室内场地,重工业,高层建筑和核电站。 在这项研究中,三个应用场所 - 室内,重工业和高层建筑 - 被选为目标场地,如图2所示。这些场地的工作通过勘探,检查和清洁来考虑。 分析了所需的机器人规格,分析了这些场所的操作和要执行的工作。 定性分析和比较了三个规格。
图2.三个主要应用场所:室内场地,重工业场地和高层建筑
2.1室内场所
室内场地包括办公室,实验室和建筑物内部。 室内场地一直是攀爬机器人研究的主要领域(Spenko等,2008; Unver&Sitti,2010)。 通常,室内现场机器人已经被开发用于诸如勘探或娱乐等简单工作。 有两个主要要求:对各种材料的粘附性和克服障碍的强大能力。 室内场地有各种表面材料,如钢铁,木材,彩绘石块等。为了在这些场所进行操作,机器人的附着单元应能够附着在这些材料上。 此外,这些网站还有许多内部的墙到墙过渡和小障碍。 因此,室内机器人需要克服这些挑战的能力。 室内场地比其他场所的干扰少,如灰尘和振动。 因此,机器人只需要足够小的有效载荷容量来携带轻型物体。 另外,机器人应该足够小以穿过这种地形中存在的狭窄缝隙。
2.2重工业基地
许多研究人员已经开发出机器人在重工业地点工作(Eich&Vogele,2011; Eich等,2014)。 这些场所的各种操作包括检查,喷漆,爆破和焊接。 这类机器人有两个主要要求:克服障碍的能力和高负载能力。 一个工业现场有许多障碍,包括内部和外部的墙到墙过渡和小障碍。 而且,由于机器人必须携带沉重的检查装置,所以需要高的有效载荷容量。 由于重工业场地通常由钢材组成,粘合单元应该能够粘附到铁磁材料。 狭窄的通道孔很容易在重工业场所看到,例如封闭形结构的入口。 因此,机器人应该足够小以穿过这个孔。
2.3高层建筑工地
由于许多国家的城市化,高层建筑的数量在增加。 高层建筑物需要定期清洁,这通常由操作人员执行。 这项清洁工作非常危险,许多研究人员尝试开发机器人来替代人工操作员(Cepolina,Michelini,Razzoli和Zoppi,2003; Imaoka,Roh,Yusuke和Hirose,2010)。 这种机器人有两个主要要求:遵守各种材料和高负载能力。 高层建筑由玻璃,砖和大理石等墙体材料组成。 因此,机器人的附着单元应该可以附着在这种材料上。 机器人还需要高稳定性,因为高空的阵风比低空更频繁地吹。 因此,机器人必须具有高负载能力(超过所需设备的重量)。 与室内场地和重工业场所不同,用于高层建筑的攀爬机器人不需要很高的克服障碍的能力。 只有基本的克服能力足以驱动这个地形,例如从水平到垂直平面和垂直到水平平面的墙到墙过渡。 在高层建筑中,机器人不必穿过小孔或缝隙,因此机器人的大小不受严格限制。
2.4规格的定性比较
表2比较了三种规格的定性分析结果。 粘附单元应该可以连接到室内和高层建筑中各种材料的表面。 在重工业用地和高层建筑物中需要克服障碍能力。 在重型工业场所和高层建筑中操作时,强大的有效载荷能力是必需的。
3.粘合技术
在本节中,我们将根据目标位置描述粘合技术。 描述了每种技术的优点和我们的实验结果。 提出了三种粘合技术:扁平干粘合剂,磁性附着和吸引机构。 室内使用平坦的干式粘合剂,重工业场所使用磁性附件,高层建筑使用吸力机构。
3.1平干胶
我们为室内机器人采用了平坦的干胶。 该技术通常与攀爬机器人一起使用(Boscariol,Henrey,Li,&Menon,2013; Krahn,Liu,Sadeghi,&Menon,2011; Murphy&Sitti,2007)。 扁平干式粘合剂可以粘附在各种材料上,如木材,钢材和涂漆的岩石。 这些都是非常重要的特征,因为室内场地的表面材料非常多样。 采用Vytaflex-10干燥弹性体(V-10,Smooth on Inc.,USA)作为MultiTank的粘合剂胎面的材料,其为平坦的干燥粘合材料。 表3列出了V-10的材料特性。
表二。 三个规格的定性比较。
室内网站 重工业现场 高层建筑
可附加材料 大多数变数(木头,画
石头,钢铁,玻璃)
铁磁 变量(玻璃,被绘的石头)
克服能力
内部转换 最重要的(内部关闭
结构体)
外部转换 不太重要(内部关闭
结构体)
小尺寸障碍 最重要的(管道,
内饰)
|
有效载荷 |
不太重要(勘探) |
重要(检查) |
最重要的(清洁) |
|
机器人的大小 |
最小( cm尺寸) |
小( cm尺寸) |
大( m尺寸) |
表三。 Vytaflex-10干燥弹性体的材料特性。
材料特性 值
肖氏硬度 10A
杨氏模量(E) 110千帕
泊松比(nu;) 0.5
抗剪强度 0.125千帕
抗拉强度 1.38 Mpa
重要(开放式结构) 不太重要(只有
水平至垂直)
重要(开放式结构) 不太重要(仅垂直于
水平)
不太重要(焊接线)
|
重要(检查) |
最重要的(清洁) |
|
小( cm尺寸) |
大( m尺寸) |
图3 V - 10弹性体及其制造工艺踏面( a ) V - 10弹性体( V - 10弹性体,2014年)。( b ) V - 10履带板的制造。1 )浇注V - 10a和B的配料放入培养皿中。2 )充分搅拌在真空室中脱气。3 )室温固化4 )激光切割圆形。5 )去除不必要的零件,用乙醇清洗。特氟隆胶带用于降低内踏板的粘性。 -
图3显示了攀爬机器人的V-10履带式踏面的制造过程。 V-10在室温在要求的高度后一天混合配料。然后,使用激光雕刻机通过跟踪内部和外部圆形路径切割胎面。然后用乙醇清洗踏板。
介绍了V - 10弹性体的粘接模型并根据实验结果对其进行了分析和设计粘合胎面( Unver amp; Siti,2010 )。通常,粘合经验数据验证了这些特征表述如下:
sigma;a = Asigma; B p (1)
其中sigma;a是粘合压力,sigma;p是预载压力,其定义为所需的预加载压力使
全文共17756字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15236],资料为PDF文档或Word文档,PDF文档可免费转换为Word

