六自由度机器人手臂在爆炸物处理中的应用设计与分析
Omar Olwan, Asem Matan, Mohammad Abdullah, and Jumana Abu-Khalaf Department of Mechatronics Engineering
German Jordanian University
Amman, Jordan
olwan.omar@gmail.com, asem-nassar@hotmail.com, m.abdullah@live.de, jumana.abukhalaf@gju.edu.jo
摘要——本文的目的是运用技术拯救生命;我们设计了一种用于EOD(爆炸军械处理)应用的机器人手臂,在能力和功能两方面,它都能够与市场上可获得的EOD机器人手臂相媲美,并且价格只是它们的一小部分。虽然市场上可买到的机器人手臂已经可用于处理各种环境中不同的物体,但是相比较而言,我们设计的机器人手臂能够满足更多特定的应用需求。我们要求手臂在各个方向上均可以伸长2米,在完全伸展状态下能够承受10公斤的最大有效载荷,并且有6个自由度,以便通过末端致动器进行有效的操纵和复杂的移动。在本文中,我们将介绍设计的过程,并将拟设计的机器人手臂固定在UGV(无人地面车辆)上进行分析。之后,在危险区域里远程操纵这种移动式机器人手臂来处理可疑的物体,同时不危害人们的生命。
关键词:机器人;设计;爆炸军械处理
一、引言
技术革命带来的显著进步之一在于当人类生命可能处于危险状态时,机器是如何取代人类的作用的。爆炸军械处理(EOD)就是这样一种应用,在保护人类免受爆炸物的潜在危险方面,技术发挥了巨大的作用[1,2]。对人类来说,在机场接触到可疑物体可能是非常危险的;例如,来路不明的行李中可能含有爆炸物,一旦打开包装袋它就会爆炸。因此,可以使用配备有机器人手臂和摄像机的无人地面车辆(UGV),而不是让工作人员冒着生命危险来检查可疑物体。所以,工作人员坐在安全的位置上就可以检查物体,他只需要检查线上可修复的部件和设备。
另外,这种移动式机器人手臂可以用于处理战后糟糕的残局;特别是战争中埋下的地雷,这种地雷甚至在被埋下数十年后仍可能造成伤亡[1]。这直接导致大面积土地被标记为不安全,而且即使穿过这些区域也是不允许的。
通常来说,一个爆炸军械处理系统由一台无人地面车辆和一个安装在该系统上的机器人手臂组成。无人地面车辆负责将机器人手臂运送到相关物体附近,在那里手臂将检查物体。操纵和处理目标物体时,可以将物体放置在一个可引爆的合适容器中,或者使用安装在末端致动器上的合适装置解除炸药;解除装置包括钢丝钳或特殊类型的武器[3,4]。
许多不同类型的机器人手臂都可以完成上述任务。每个手臂都有自己的规格,这取决于确切的应用场合和操作环境。此外,还需要研究几个因素以确定最终的设计特性;特别是所需的自由度数量,需要承受的最大有效载荷,需要达到的精度,手臂存储时的尺寸,当然还有总共的成本。
本文中,我们将介绍设计过程以及分析过程。通过分析我们能够获得这样一个六自由度机器人手臂:它在最大2米的伸展范围内能够承载10公斤有效载荷,能够通过PS3控制器实现无线控制,而且它的总成本低于3000美元,不仅满足规格和性能水平,而且比市场上可买到的机器人要便宜得多[5]。
二、设计方法
根据要求,拟设计的机器人手臂具有多达六个自由度,允许手臂的末端致动器具有六个独立的运动。这将增加手臂运动的精度,提高实现复杂运动的潜能[6]。拥有六个自由度需要六个关节相互作用,为末端致动器提供最高效的运动。
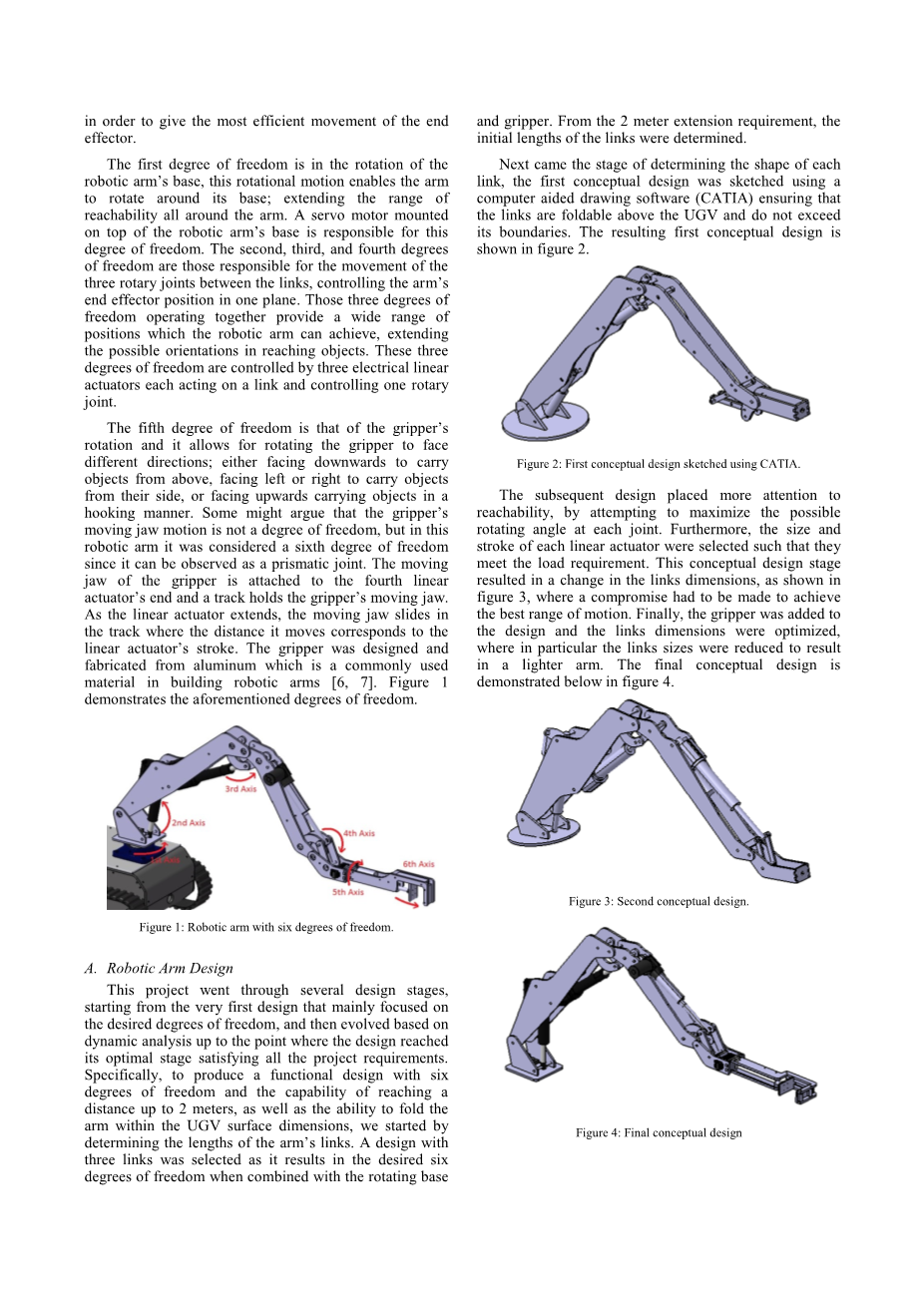
第一个自由度控制机器人手臂基座的旋转,这种旋转运动使手臂能够围绕其基座旋转;它扩大了手臂周围可达的范围。安装在机器人手臂基座顶部的伺服电机负责控制这个自由度。第二,第三和第四自由度负责控制连杆之间三个旋转关节的运动,控制末端致动器在一个平面内的位置。这三个自由度一起工作,为机器人手臂提供了广阔的活动范围,扩展了它到达目标物体的角度范围。这三个自由度由三个电动线性致动器控制,每个线性致动器均作用于连杆并控制一个旋转接头。
第五个自由度控制抓手的旋转,它能够使抓手转动以朝向不同的方向;要么朝下搬运物品,要么朝左或朝右从侧面搬运物品,要么朝上以吊钩的形式搬运物品。有些人可能会争辩说抓手下颌的运动不需要一个自由度,但是在这个机器人手臂中,我们认为这里存在第六自由度,因为它可以被看作是一个棱形关节。抓手的下颌连接到了第四个线性驱动器的末端,一条轨道夹持住了抓手的下颌。随着线性致动器的舒展,抓手的下颌在轨道中滑动,其移动的距离与线性致动器的行程相对应。抓手是用铝设计制造的,铝是建造机器人手臂时常用的材料[6,7]。图1展示了上述的自由度。
图1:六自由度机器人手臂
A.机器人手臂设计
这个项目经历了几个设计阶段,最开始的设计主要关注所要需的自由度,接着基于动态分析进行演变,直到设计满足所有的项目要求,达到最佳阶段。具体来说,为了完成整个功能性设计,使其具有六个自由度,具备伸展到2米距离和在无人地面车辆的表面尺寸内折叠手臂的能力,我们首先确定了手臂的连杆长度。我们选择在设计中使用三个连杆,因为通过连杆与旋转底座和抓手的连接可以获得所需的六个自由度。按照需要2米伸展距离的要求,确定好链节的初始长度。
接下来这个阶段确定每个链节的形状,使用一种计算机辅助绘图软件(CATIA)绘制出第一个概念设计,确保链节可以在无人地面车辆上方折叠并且不超出其边界。绘制的第一个概念设计如图2所示。
图2:使用CATIA绘制的第一个概念设计
随后的设计更多地关注了可达性,尝试将各个关节的可旋角度最大化。接着,合理地选择每个线性致动器的尺寸和行程,以满足负载要求。在这个概念设计阶段中,链节尺寸发生了变化,如图3所示,必须达到平衡状态才能得到最佳的运动范围。最后,将抓手添加到设计中,进一步优化链节尺寸,尤其是减小链节尺寸以得到更轻的手臂。最终的概念设计如图4所示。
图3:第二个概念设计
图4:最终的概念设计
B.驱动电路
在完成机器人手臂的设计后,必须组装一套驱动电路。机器人手臂元件中,有4个线性致动器需要电路控制。这些致动器基本上都是直流电机,通过切换电机端子的极性来控制旋转方向。可以运行由继电器构成的H桥来驱动线性致动器。具体来说,预焊接的继电器模块能够实现使用一个微控制器直接控制电机,所以具有实用性,如图5所示。
图5:线性致动器的驱动电路示例
C.远程控制器
选择Arduino Mega微控制器,因为可以使用它自带的C语言轻松编程。它的代码包含一个库,能够将Arduino Mega微控制器连接到蓝牙适配器上,然后进一步连接到无线PS3控制器上,通过PS3控制器无线控制继电器。继电器控制线性致动器的直流电机中电流的流动方向,进而控制机器人手臂每个连杆的伸出和缩回。PS3控制器中的模拟按钮用于控制安装在旋转底座和抓手上的伺服电机的速运转度和方向。图6说明了电机的控制方案。
图6:控制流程图
三、机械分析
有必要分析机器人手臂的运行能力,因此进行以下计算以确保机械设计符合预定的要求。
A.转矩计算
为了计算基座和抓手电机的转矩,我们使用了牛顿第二定律。定律t= Ia表明旋转物体所需的扭矩等于物体的转动惯量乘以角加速度。优先将机器人手臂和抓手的角加速度选用较小值,使手臂的运动平稳流畅,相应地,转动惯量成为了影响转矩的主要参数。所使用的电机提供非常高的转矩,这得益于它们使用了传动比为7:1的齿轮,提供了高转矩和低转速,使其适用于该机器人手臂。
B.力学分析
为了给机器人手臂选择合适的尺寸,我们需要对此次机械设计进行力学分析。 假设忽略不计静态分析和动态分析获得的结果之间的差异,并且考虑到手臂的移动非常缓慢,我们决定使用静力学分析。将一个简易的10公斤负载以Y轴方向上垂直力的形式施加到手臂抓手的尖端,并且将机器人手臂部件的所有重量都加上,包括致动器的重量和铝制连杆梁的重量,如图7所示。将机器人手臂的基座设置为固定的,使用牛顿定律进行简单的静力学分析。
*假定链节1,2,3和4为“二力杆件”
图7:作用在机器人手臂上的力。
当手臂处于不同状态时,分别进行静力学分析;三种状态分别是手臂完全向前伸展时,手臂伸展达到最大的高度时,以及手臂向下倾斜,抓取靠近无人地面车辆的物体时。其中,当手臂完全向前伸展时,手臂产生的力最大。在静力学分析中,我们发现了由负载和链节的重量引起的反作用力。这些反作用力作用在将链板连接在一起的链节和引脚之间的接触点上,可以通过这些力对手臂的各个部分进行应力分析。从抓手开始,一直到基座节点,进行力学分析,如图8-12所示。在每个引脚处,将累积产生的载荷加到前面部分的重量中。
图8:抓手上的反作用力
图9:第二个链节致动器上的反作用力
图10:第二个链节上的反作用力
图11:第二个链节致动器上的反作用力
图12:第一个链节上的反作用力
C.应力分析
我们使用了CATIA对机器人手臂的部件进行应力分析;CATIA附带了适用于不同CAD绘图格式的应力分析和模拟工具。首先必须将材料分配到需要测试的部分;使用CATIA分配材料,软件将自动给出部件相应的机械特性。将铝材料分配完毕后,就可以设置部件上不同点处的力;根据静力学分析获得的结果设定这些力。接下来,对部件进行网格划分,软件可以计算出作用在部件上的应力。我们使用了CATIA提供的von mises压力屈服准则。我们根据算出的von mises最大应力改变部件的尺寸,以减小应力[8],在应力分析过程中我们使用的安全系数为4。图13和图14同时展示了第一和第二链节反复循环运动产生的应力。
图13:第一个链节上的应力
图14:第二个链节上的应力
D.避免倾翻
在处理危险物品时,安全地操作手臂是十分重要的,所以要进行倾翻分析以获得关于负载极限的信息,用于稳定性能。我们使用了MATLAB来设置倾翻方程并获得极限提升负载曲线图。该分析假定车辆的边缘是轴心点,无人地面车辆在平坦的表面上运行。在手臂处于不同状态时(伸展时),手臂都会对应一个特定的负载范围,操作员需要十分注意,避免系统变得不稳定。
我们使用MATLAB代码计算手臂在处理负载过程中处于不同角度和伸展状态时的合力矩,并将它与无人地面车面的重量产生的合力矩进行比较。两个合力矩相等处的点是不稳定点,这些点应该被避免。车辆的重量为200公斤,为了安全起见,在倾翻计算中将它看作150公斤。在全伸展和半伸展状态时计算手臂翻转的能力。将离轴心点0.47米的无人地面车面的中心看作是它的质心。将每个部分的中心看作是该部分的质心。图15展示了可能导致手臂和无人地面车辆翻转的力。图16展示了最终的极限提升负载图,显示了手臂处于不同伸展状态时允许承受的最大有效载荷。
图15:可能导致手臂倾翻的力
图16:机器人手臂处于不同伸展状态时的额定有效载荷
四、测试
在这一节中,我们将完成并测试由扭矩,力和应力分析所确定的机械设计。首先,建立一个木制模型来验证手臂的功能,然后构建并测试最终的手臂样品。
A.假设
在机器人手臂的设计过程中,为了简化设计或帮助做出某些决定,通常我们会提出假设。考虑到系统运动的速度足够慢,在确定手臂的驱动要求时,做出的主要假设之一是忽略手臂的加速。这样便于进行静力学分析,大大简化了计算连杆间的反作用力和致动器所需的扭矩的过程。在选择线性致动器时,将这些扭矩乘以安全系数以进一步提高手臂的性能。
B.机械设计测试
建议在制造铝制部件之前就测试机器人手臂机构。最开始用木头制造的机器人手臂进行测试。测试木制机器人手臂模型时需要测试其伸展性能,回缩性能,移动范围,可达性和折叠性。由于木材的强度无法与分析时使用的高强度铝合金相比,木质模型无法承载较高的有效载荷。然而,木制手臂的测试取得了成功,并且这个测试还帮助完成了控制器的开发。
图17:机器人手臂的木制模型
在最开始的测试之后,使用高强度的铝加工出手臂的部件,让组装出铝制机器人手臂。接着,我们测试了手臂的伸展特性和回缩特性,在测试中,手臂以最小的振幅展示出稳定的运动。同时,在伸展至目标物体时,手臂的速度也处于合适范围,特别适合操作人员来控制手臂。特别在爆炸军械处理的应用中,需要精确的运动,可能会难以控制快速运动的机器人手臂。之后,我们测试了抓手的功能,发现它能够以一种理想的方式抓取物体,但是随着抓爪的移动,轨道中的摩擦变得越来越明显。有时,这会导致抓手在致动器推动它时发生倾斜,但它仍然能够承载物体。在最后的测试阶段中,手臂装载了不同的物体,使用了所有的自由度来操纵它们,该测试展示了手臂在承载不同的有效载荷时,处于不同位置时的功能。图18和19展示了手臂在处于完全伸展时的位置以及伸出1米时的位置。
图18:向上完全伸展时的机器人手臂
图19:伸出1米时的机器人手臂
C.结果
在多次测试了机器人手臂后,得出结论:在额定电流范围内,电气线路在连续操作时十分稳定;所有的线性致动器都与熔断器相连。因此,手臂能够满足安全操作的条件,同时系统故障的风险最小。更重要的是,机器人手臂在最
全文共7580字,剩余内容已隐藏,支付完成后下载完整资料

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14717],资料为PDF文档或Word文档,PDF文档可免费转换为Word

