英语原文共 21 页
一种新型电动汽车双速不间断机械变速器的设计与控制
胜南芳,简松,宋海军,余卓泰,费莉,张新元
1 .清华大学汽车安全与能源国家重点实验室,北京100084
2 .石家庄机械化步兵学院战斗训练实验中心,河北石家庄050083
摘要
传统的全电动汽车采用单速传动,成本低,结构简单。然而,随着这种传动系统的采用,电动汽车技术的发展对驱动电机的性能要求也越来越高。在电动汽车上引入多速或双速变速器,为提高整个动力系统的效率提供了可能。本文介绍了一种新颖的双速不间断机械传动(UMT),它由一个行星齿轮传动系统、一个离心式离合器和一个制动带组成,允许两个齿轮之间的无缝切换。此外,基于模糊逻辑控制器(FLC)的控制系统利用车速和油门踏板位置信号识别驾驶员的意图。与相同传动比下的优化AMT相比,新型的AMT具有更好的动力性和舒适性。将基于驾驶员意图识别的控制策略与传统的双参数换档策略进行了比较。并对最优换档控制算法的中间层进行了仿真分析。结果表明,采用FLC和最优控制方法的城市轨道交通对电动汽车的能效、动力性能和换挡舒适性都有显著提高。
关键词:电动汽车 AMT 不间断机械变速器(UMT) 模糊逻辑控制器(FLC)最优控制 无缝转变
1. 介绍
随着环境污染、全球变暖和石油资源短缺的加剧,政府部门对燃油经济性和排放都颁布了更加严格的规定。与此同时,电动汽车带来的零排放、独立于原油、高能效等优点,受到了汽车制造商和消费者的极大关注。
回顾电动汽车的发展历程,电动汽车的发展经历了三个阶段[1-3]。从1834年电动汽车问世到20世纪初,电动汽车经历了其发展的第一个关键时期。正是在这个时期,北美和欧洲的许多公司生产和销售电动汽车,而不是内燃机汽车(ICEV)。然而,由于电池技术的限制,电动汽车发展缓慢,而IECV的技术和制造经历了一个快速发展的时期。由于这个原因,从1930年代起电动汽车被ICEV取代。直到20世纪70年代初,当石油危机和环境问题出现时,一些国家开始寻找ICEV的替代品。因此,电动汽车,以及混合动力电动汽车(HEV)和燃料电池汽车(FCV)重新成为人们关注的焦点。
电动汽车比传统的化石燃料汽车拥有更先进的能源和更智能的能源管理。然而,电动汽车需要提高整体的成本效益,从而在市场上具有更强的竞争力。电动汽车需要关注的三大问题是电池性能和管理的优化、推进效率的提高和充电设施的布局[4,5]。
针对电动汽车推进系统的优化,做了大量的工作,包括对能源管理体系结构和建模的研究[6,7],对电动汽车先进电力系统的研究,以及对不同电机传动系统的比较[8]。此外,电动汽车传动系统的课题研究也正在进行中。目前的研究工作表明,用更适用的传动系统替代传统的单速减速器可以显著提高电动汽车的性能[9-14]。通过对几种标准驱动周期电动汽车的建模和仿真,将传统的手动变速器(MT)和无级变速器(CVT)与单速减速器进行了比较。双速自动手动变速器(AMT)介绍了电动汽车的仿真以及实验在试验台[14–16],和一个逆AMT研究干式离合器位于后方的传播,传统AMT的牵引中断可以取消[17]。还实现了双速双离合器传动(DCT)。此外,在文献[19,20]中,在传统的双速MT基础上增加了单向sprag离合器,设计了一种新型的双速变速箱结构[18]。虽然AMT在电动汽车上的实施可以提高能源效率,但由于受机构和原理的限制,变速过程中出现的电力中断会导致汽车的舒适性较差。因此,平稳的变速对电动汽车的传动系统是必要的和至关重要的[21]。本文介绍了一种新型的双速传动系统,利用其机械结构的优点,实现了无缝换挡。与[19-21]中由传统MT发展而来的传动系统相比,本文提出的新型传动系统实现了更紧凑的封装,更易于控制。
变速器控制系统的两个重要问题是变速决策和变速控制。在变速决策领域,AT中采用模糊逻辑技术来推断驾驶员的加速意图[22-24]。在AMT,司机的意图,道路负荷估计使用车辆速度、油门踏板位置及其变化的速度通过一个模糊逻辑模块[25-27],和发动机的扭矩和速度也用来评估的发动机工况[28]。除了上述参数外,还定义了相对油门踏板位置,以帮助评估驾驶员的期望加速性能,综合了驾驶员的驾驶状态和意图[29,30]。
在变速控制领域,对各种变速器的变速控制进行了优化研究。考虑到驾驶员输入和车辆结构的不确定性[29],可以将H1控制和LMI(线性矩阵不等式)方法引入变速控制器中,提供更好的性能[30-33]。最优控制方法已应用于车辆的离合器啮合[34-36],也已应用于混合动力汽车的变速指令[34,37,38]。采用动态规划法和最优控制方法,通过对AT换挡过程的性能指标进行最小化,得到了该系统的显式控制律。
本文针对在换挡杆改善动态性能,确保转变点更合适的选择和减少能源消耗,驾驶员意图识别的基于模糊逻辑的方法控制和最优控制算法实现换挡杆的电动汽车的传动控制系统。
在接下来的两部分中,给出了传动系统的机械布局和数学模型,包括两档状态和换挡过程。第四章设计了一种三层传动系统控制器,详细讨论了变速过程中的控制原理。最后,通过一组仿真结果,在第5节中给出了所提出的新型变速器控制系统的性能。
2. 新型变速系统的结构和原理
2.1 .变速器结构
在动力性能、经济性和舒适性这三个影响自动变速器设计的关键因素之间,如何达成妥协是关键,也是难点。采用改进的控制方法,对一种新型结构的变速器进行控制,使其具有更高的效率、更好的动态性能和更好的换档质量,是新型双速城铁的发展目标。在本节中,详细介绍了城市轨道交通的机械结构。
地铁采用单级行星齿轮系统和不间断换挡系统。该变速器的结构在某种程度上类似于传统的AT,但有两个显著的差异。转矩变换器通常用于常规的AT中,但由于其效率较低,目前的UMT中没有采用转矩变换器。此外,城市轨道交通的变速系统使用电动执行机构,而传统的AT使用液压执行机构。前者结构简单,部署方便,响应速度快。
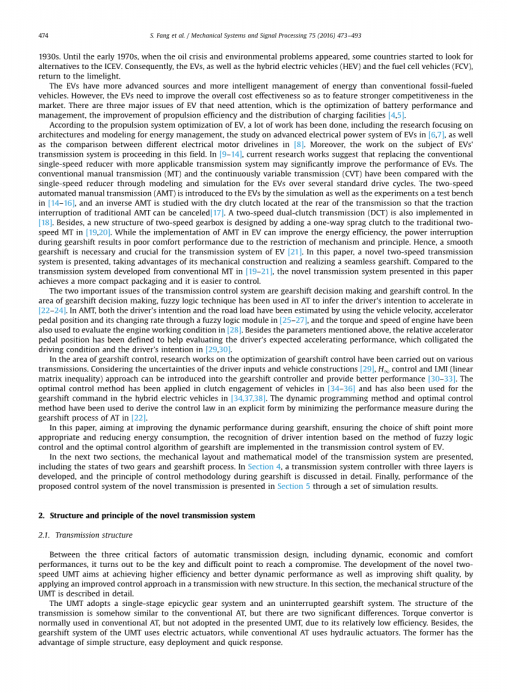
图1所示。新型双速变速器(1)一、(2)二档原理图。
图2所示。(1)离心式离合器与(2)制动带结构图。
根据行星齿轮系统的两个自由度,可以在一个紧凑的包装内实现齿轮速比的两个步骤。为了保证换档时功率的连续性,采用不间断换档系统,成本低,易于控制。离心式离合器和制动带组成变速器系统,如图1所示。离心式离合器配合制动带,使新型变速器实现无缝换挡,换挡质量优异,与普通电动汽车单级变速器具有竞争力。
单级行星齿轮系统由一个太阳齿轮、一个环形齿轮和一对行星齿轮组成。太阳齿轮作为输入,由驱动电机的输入扭矩驱动,而载体将输出扭矩传递给差速器。离心式离合器的结构图如图2(1)所示,与传统的鼓式制动器有一定的相似之处,但离合器蹄与离合器板是可旋转的,回弹力可由伺服电机调节。通过调节回簧与离合器蹄轴的相对夹角,可以改变回簧的回力矩,从而改变离合器蹄与离合器鼓之间的接触力。当相对角度为零时,回流扭矩为零,离心式离合器的摩擦扭矩达到最大值。与此相反,返回扭矩较大,离合器摩擦扭矩较小。变速系统的制动带通常是闭合的,并由电机用螺帽副控制,如图2(2)所示。
2.2. 工作过程
如图1所示,在第一挡时,环形齿轮由制动带固定。同时离合器蹄片受离心式离合器系统内部回弹提供的张力作用,与离合器系统的鼓没有接触,不产生摩擦力矩。因此,由每个齿轮的齿数决定的齿轮传动比大于1。离心式离合器在离合器蹄转速达到一定值后才开始啮合,在二档时松开制动带,使变速器整体运动,变速器传动比为1。
根据变速器输入输出轴的转速比,称为传动比,变速器的工作过程可分为三种状态:
- 第一齿轮,随着制动带的啮合,离合器在零扭矩下的传动比与第一节齿轮的传动比相等;
图3 简化了恒转矩条件下的上档顺序(1),恒转矩条件下再生制动时的下档顺序(2)。
图4 传动系统仿真模型框图
- 第二齿轮,与离合器啮合,制动力矩为零,且齿数比等于1;
- 换挡杆。
换档过程如图3所示,电动汽车分别经历上档和下档。
在图3第(1)部分的转矩阶段,离合器转矩逐渐增大,开始上档,从而引起制动转矩的减小。如图所示,在第一齿轮正常工作过程中离合器扭矩为零。当需要上档到第二档时,离合器蹄片的离心力克服了离心式离合器内回弹的影响。随着载流子转速的增加,与车辆速度成正比,离合器扭矩呈二次增长,导致制动带静摩擦扭矩相应减小。变速器输入输出轴的转速与传动轴的传动比保持不变,环形齿轮的转速为零,而环形齿轮的转速为零,直到制动带扭矩降至零。
在图3中第(1)部分的惯性相位开始时,制动力矩为零,从而使环形齿轮旋转。在离心式离合器摩擦力矩的作用下,环形齿轮与载体之间的转速差减小。在上档惯性阶段结束时,在离合器扭矩的作用下,行星传动系统各部件的转速趋于均匀。
图3中,制动带逐渐进入第(2)部分的扭矩阶段,开始下档,离合器扭矩随着载流子转速的降低而减小。在这一阶段称为转矩阶段,制动带滑动摩擦力矩定量值的增大弥补了离心离合器静摩擦力矩的减小,因此传动比保持不变。
当离合器转矩为零时,图3中第(2)部分的惯性相位开始,由于制动转矩的作用,环形齿轮减速。当环形齿轮停止转动时,惯性阶段就结束了。
3.传动系统动力学建模
为了评估新型双速城市轨道交通的动态性能,并为其设计合适的控制系统,建立了描述电动汽车动力总成系统的仿真模型。所实现的仿真模型包括驱动模块、电机、电池、变速器和车辆纵向动力学考虑电机时间常数,电池SOC的估计,以及半轴扭转动态的影响。在本节中,指定了传动系统的模型。
传动系统由电机、传动系统、末驱和车辆纵向动力学组成,如图4所示。将变速器输入轴和输出轴的弹性模型化为弹簧阻尼系统。此外,传动系统模型的其它部件也被视为刚体,通过刚体单元相互连接。
图5 电机特性图
3.1. 电动机
将电机建模为旋转刚体,忽略了电机的高频振动和转动惯量。电动机的转矩TM可以从一个查找表插值函数的油门踏板位置alpha;P和发动机转速omega;M
TM=fM(alpha;P, omega;m)
电动机的效率可以从测量特征地图内插如图5所示,电动机转速的函数omega;M和电动机转矩TM。将连接电机和变速器的轴建模为弹簧阻尼系统,弹簧系数为kS,阻尼系数为cS。轴的弹性方程为
TM=kS(theta;M-theta;S) cS(omega;M-omega;S)
角theta;M-theta;S轴的扭转角,和omega;S在下一节中解释。
3.2. 变速器系统
在稳态条件下,行星系统的动力学可以定义为:
omega;S=(1-iSPiPR)omega;C iSPiPRomega;R=i1omega;C (1-i1)omega;R
omega;S,omega;R和omega;C太阳齿轮的转动速度,环形齿轮和承运人。变速器的第一齿轮比为i1。iSP为行星齿轮与太阳齿轮速比的负值,iPR为环形齿轮与行星齿轮速比。传动系统总体方程如下:
其中J1、J2、J3、J4是由太阳齿轮惯量JS、载流子惯量JC、环形齿轮惯量JR、单行星齿轮惯量JP和质量mP计算得到的惯量的简写,如下图所示。RSP是太阳齿轮和行星齿轮中心之间的距离。n是齿数的数量
mCL每个离合器鞋的质量是,RCL和拼箱是等价的半径和手臂的力量计算离心力和离合器鞋的时刻,FS和LS是力和回位弹簧的长度,和mu;CL库仑摩擦系数。假设制动力矩TBR与外加电场力FBR[40]成线性关系。因此制动力矩可以写成
TB
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

