英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
武汉理工大学毕业论文(设计)
外文翻译
学院(系): 汽车工程学院
专业班级: 汽服1401
学生姓名: 任振彬
指导老师: 吴婧
原文
Vehicle Self-localization with High-Precision Digital Maps
Andreas Schindler
Abstract
Cooperative driver assistance functions benefit from sharing information on the local environments of individual road users by means of communication technology and advanced sensor data fusion methods. However, the consistent integration of environment models as well as the subsequent interpretation of traffic situations impose high requirements on the self-localization accuracy of vehicles. This paper presents methods and models for a map-based vehicle self-localization approach. Basically, information from the vehicular environment perception (using a monocular camera and laser scanner) is associated with data of a high-precision digital map in order to deduce the vehiclersquo;s position. Within the Monte-Carlo localization approach, the association of road markings is reduced to a prototype fitting problem which can be solved efficiently due to a map model based on smooth arc splines. Experiments on a rural road show that the localization approach reaches a global positioning accuracy in both lateral and longitudinal direction significantly below one meter and an orientation accuracy below one degree even at a speed up to 100 km/h in real-time.
I. INTRODUCTION
In recent years, driver assistance systems contributed significantly to the reduction of traffic accidents and the mitigation of crash consequences. Wireless communication technologies as well as sensor data fusion methods across vehicles enable cooperative assistance functions. By sharing information on their local environments, the individual road users increase the robustness and completeness of knowledge on the surroundings and, thus, enrich the data basis for making decisions. Within the joint project Ko-PER, which is part of the research initiative Ko-FAS (cf. [1]), cooperative assistance functions are investigated in rural areas aiming to reduce crashes that occur at overtaking maneuvers, rearend collisions or hazardous situations of crossing pedestrians. However, the consistent integration of environment models as well as the subsequent interpretation of traffic situations impose high requirements on the self-localization accuracy of vehicles. More precisely, a longitudinal and lateral position accuracy below 1 m and an orientation accuracy in the magnitude of 1 ◦ are required in order to distinguish between two adjacent vehicles and to associate road users and individual lanes. Hence, the vehicle self-localization represents an essential and challenging component for any cooperative system.
Since standard GNSS based localization techniques often cannot provide positioning results with the required accuracy and reliability defined above due to multi-path scattering, shading effects caused by the environment and atmospheric disturbances (cf. [2]), alternative and complementary global localization techniques must be considered.
Originating in the field of robot localization, simultaneous localization and mapping (SLAM) approaches are widely investigated (cf. [3] for a survey) in order to determine a vehiclersquo;s pose
Andreas Schindler is with FORWISS, the Institute for Software Systems in Technical Applications, University of Passau, 94032 Passau, Germany schindler@forwiss.uni-passau.de
using a digital map created during driving. In the literature several vehicle self-localization approaches are known based on feature matching of laser scans like [4], [5], [6]. The work in [7] generates a feature map using aerial images. Road markings are detected based on stereo vision and characterized by their centroids, and the landmark association problem is realized by classical feature matching. In contrast, the approach in [8] uses texture interpretation to compare a texture feature map and image contents for a video-based self-localization in urban environments.
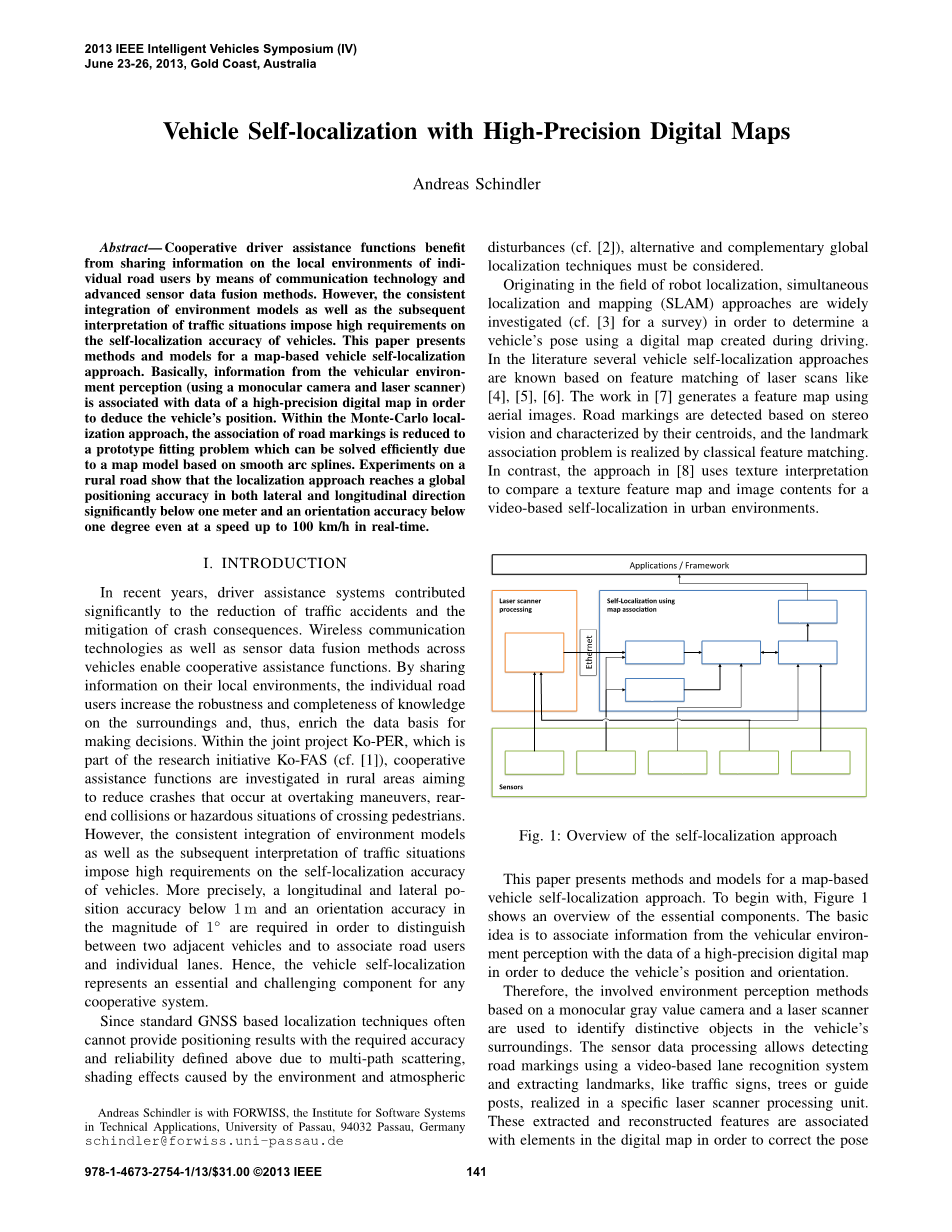
Fig. 1: Overview of the self-localization approach
This paper presents methods and models for a map-based vehicle self-localization approach. To begin with, Figure 1 shows an overview of the essential components. The basic idea is to associate information from the vehicular environment perception with the data of a high-precision digital map in order to deduce the vehiclersquo;s position and orientation.
Therefore, the involved environment perception methods based on a monocular gray value camera and a laser scanner are used to identify distinctive objects in the vehiclersquo;s surroundings. The sensor data processing allows detecting road markings using a video-based lane recognition system and extracting landmarks, like traffic signs, trees or guide posts, realized in a specific laser scanner processing unit. These extracted and reconstructed features are associated with elements in the digital map in order to correct the pose estimation, which is roughly initialized with GPS. Intrinsic measurements of the vehicle dynamics, like the velocity and the turn rate, determine the motion model parameter of the vehicle.
Within the reference implementation, the probabilistic self-localization approach is realized using a Monte-Carlo Localization (MCL) technique (cf. [9]). Regarding the measurement update of the state estimation algorithm, the association with corresponding map elements is reduced to a prototype fitting problem.
II. DIGITAL MAP
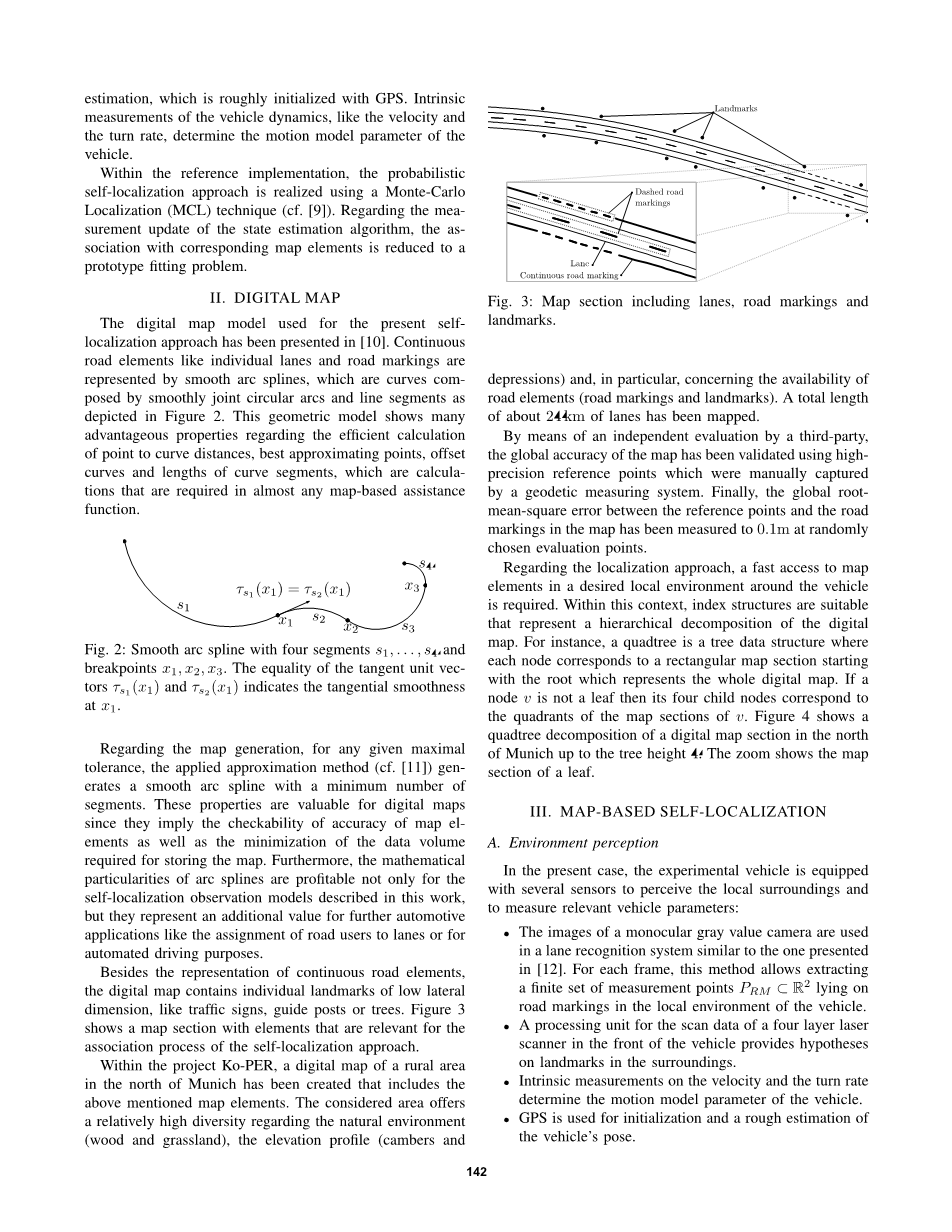
The digital map model used for the present self-localization approach has been presented in [10]. Continuous road elements like individual lanes and road markings are represented by smooth arc splines, which are curves composed by smoothly joint circular arcs and line segments as depicted in Figure 2. This geometric model shows many advantageous properties regarding the efficient calculation of point to curve distances, best
全文共33819字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11792],资料为PDF文档或Word文档,PDF文档可免费转换为Word

