
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
New Integrity Concept for Intelligent Transportation Systems (ITS) for Safety of Live (SoL) applications
H. Beckmann, V. Kropp, B. Eissfeller
Institute of Space Technology and Space Applications University FAF Munich
Munich, Germany Hanno.beckmann@unibw.de
Abstract
The paper focuses on a robust and precise car navigation system, combined with an ITS Car-2-Car platform. The system can also be used in GNSS denied or spoofed scenarios. It is based and designed for so called On Board Units (OBU), which are already used for professional road tolling and tracking applications. The system combines GNSS and dead reckoning (DR) trajectories, based on odometry and inertial navigation to provide a reliable Position, Navigation and Timing (PNT) with integrity information. This PNT estimation is shared with other road users via Car-2-Car communication and combined with an automotive radar system for distress warnings and PNT validation.
Keywords—GNSS, integrity, odometry, IMU, jamming, spoofing, AHRS, Car-2-Car, ITS, RADAR
I. INTRODUCTION
Global Navigation Satellite Systems (GNSS) have deeply entered the consumer market and are widely used for car navigation systems. GNSS based service applications offer a number of opportunities to the transportation market. Professional and reliability critical applications like road tolling, anti-theft systems and dangerous goods tracking have already been implemented into some of vehicles. There is a continuing development of modern features and additional intelligence of future services. These applications are highly sensitive to the appearance of jamming devices, on account of weaknesses of current satellite navigation systems: the extremely low signal power.
Beyond navigational aspects, the Position Navigation and Timing (PNT) provided by GNSS are also used as input parameters for vehicle systems, such as Car-2-Car communication and autonomous driving. At the systemsrsquo; performance level the service is improving according to the ongoing development of standards and applications.
The main focus is put on integrity of required information and safety warnings which will be transmitted to stakeholder groups. For Safety of Life (SoL) applications it is essential to obtain reliable position and time information with the required confidence level. Up till now, research in Car-2-Car communications does not involve integrity of the transmitted information, but use only checks of GNSS sub-trajectories.
The Multi RAIM II project studies new RAIM concepts for Multi-GNSS usage in many different user groups like maritime, avionics, rail and road users. For this paper we concentrate on automotive users, because itrsquo;s the main focus of the projectrsquo;s research work and includes also the development of a hardware demonstrator to show the practical impact of new RAIM concepts and additional mitigation techniques based on external sensors.
The next sections of this paper are structured as follows: At first an overview of the general system concept including a rough description of the subsystems is given. Thereafter a closer look on the details of the basic RAIM concepts and the DR – GNSS coupling techniques and DR – GNSS cross checks are provided. In the last section test results of the improved hybrid DR – GNSS coupling interface are provided. The last section provides an overview on future applications for Safety of Life (SoL) applications for road users.
II.OVERALL SYSTEM CONCEPT
Our research work in the Multi RAIM II project is a multi- sensor approach: combining vehiclesrsquo; internal sensors like odometric wheel speed sensors, long range radar and an IMU (inertial measurement unit) with a GNSS receiver. In addition, this receiver is capable to perform Receiver Autonomous Integrity Monitoring (RAIM) for multiple GNSS to improve the reliability of the PNT solution. The platform concept of the Multi RAIM II system is shown in Figure 1.
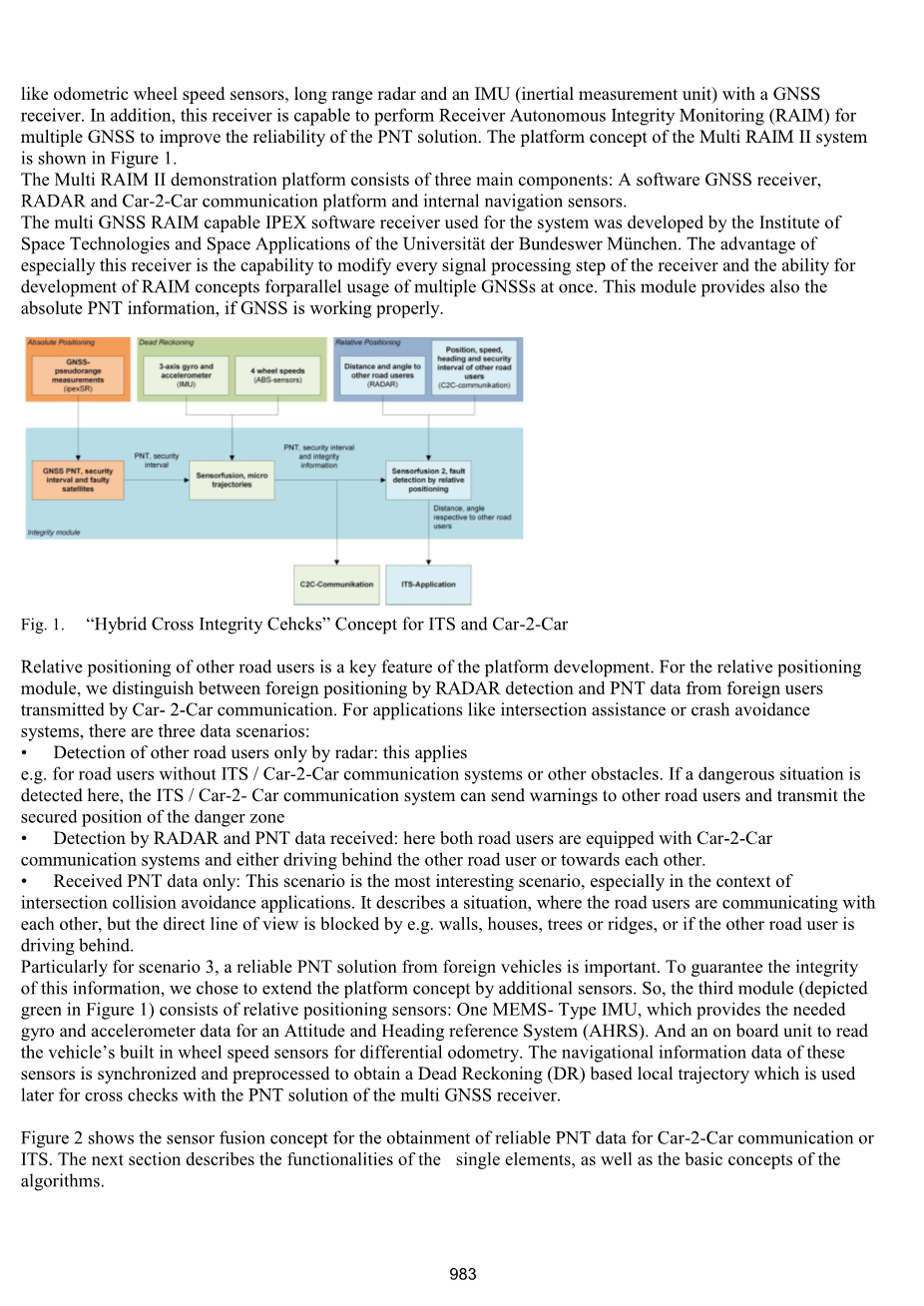
The Multi RAIM II demonstration platform consists of three main components: A software GNSS receiver, RADAR and Car-2-Car communication platform and internal navigation sensors.
The multi GNSS RAIM capable IPEX software receiver used for the system was developed by the Institute of Space Technologies and Space Applications of the Universitauml;t der Bundeswer Muuml;nchen. The advantage of especially this receiver is the capability to modify every signal processing step of the receiver and the ability for development of RAIM concepts forparallel usage of multiple GNSSs at once. This module provides also the absolute PNT information, if GNSS is working properly.
Fig. 1. “Hybrid Cross Integrity Cehcks” Concept for ITS and Car-2-Car
Relative positioning of other road users is a key feature of the platform development. For the relative positioning module, we distinguish between foreign positioning by RADAR detection and PNT data from foreign users transmitted by Car- 2-Car communication. For applications like intersection assistance or crash avoidance systems, there are three data scenarios:
bull; Detection of other road users only by radar: this applies
e.g. for road users without ITS / Car-2-Car communication systems or other obstacles. If a dangerous situation is detected here, the ITS / Car-2- Car communication system can send warnings to other road users and transmit the secured position of the danger zone
bull; Detection by RADAR and PNT data received: here both road users are equipped with Car-2-Car communication systems and either driving behind the other road user or towards each other.
bull; Received PNT data only: This scenario is the most interesting scenario, especially in the context of
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[151440],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

