英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
重型自动变速器系统离合器执行器的系统建模和压力控制
孟飞、张慧、曹东渠、IEEE成员、陈慧妍
摘要 — 离合器压力的精确控制对于需要离合器致动器的快速响应的重型自动变速器应用是关键的,具有减压阀(PRV)的常规离合器致动器系统不适用于这种应用。这是由于需要大的瞬时流量和用于通电切换的高输出功率的事实。在本文中,为重型自动变速系统开发了先导式PRV。开发的PRV可以使离合器致动器系统同时具有快速响应和高流量。PRV利用具有高速比例电磁阀(PSV)的三级结构作为先导级,以在阀响应和流量之间进行权衡。首先,基于流体动力学开发了用于离合器压力控制系统的线性化输入—输出动态分析模型。然后,识别参数,并通过使用实验数据验证该模型。对于经验证的输入—输出模型,在测试设置中设计和实施开环和闭环(反馈)压力控制策略从实验结果推导出反馈控制可以产生出色的控制精度。 开发的离合器执行器系统适用于重型自动变速器。
索引术语—离合器执行器系统,离合器压力控制,重型变速器,减压阀(PRV),系统建模。
I. 引言
过去十年中对车辆技术的关注越来越多; 参见[1] - [6]及其中的参考文献。在所有热门话题中,自动变速器是一个具有挑战性的。全自动变速器是根据发动机负载和车辆速度的变化提供所需传动比的装置[7] - [9]。为了实现该主要功能,自动变速器需要自动接合和分离诸如分离离合器和制动器的一对摩擦元件。在换档阶段,使即将接合的离合器的接合和脱离的离合器的分离同步可以实现换档的功能[10] - [13]。为了实现平稳的换档,通过离合器致动器系统的对离合器和离合器的精确控制是重要的[14],[15]。在文献中,存在用于不同变速器的离合器控制的许多不同类型的致动器系统; 参见[16] - [20]及其中的参考文献需要提及的是,对于重型自动变速器,最常见的配置是使用液压致动器,由于较高的功率重量比和自润滑的优点。
在液压致动器系统中,共同的策略是使用调节器压力阀来响应车辆速度。调节器压力阀具有产生作用在活塞上的流体压力的功能,压力将迫使离合器和制动器接合或脱离。因此,一旦摩擦部件已经被设计,压力控制对于换档性能是非常关键的。理论上,希望对致动器具有快速响应和精确的调节器压力,但为了满足实际需要,致动器系统也应该高效和简单。
为了提高液压致动器系统的可控性和灵活性,电磁阀控制技术在过去几十年中已经引起越来越多的关注。对于重型自动变速器中的离合器液压致动器系统,电磁阀可以分为三种类型,即伺服阀,开/关电磁阀和比例电磁阀(PSV)。伺服阀致动离合器解决方案提供了一些优点,如快速和精确的压力控制性能[16],[21]。然而,伺服阀系统需要可持续的清洁环境,以避免阀芯卡住。制造商在降低成本的前提下改进系统可能是一个挑战。开/关电磁阀具有相对低的控制精度。然而,由于低成本,开/关电磁阀已经在工业中广泛使用。在[22]中,分析了一种新颖的离合器致动器系统。 该系统包括一个开/关电磁阀和一个内部反馈阀芯作为压力调节单元。目前,具有电液比例控制特性的先导操作的两级压力调节阀被指出是用于离合器的实时最佳控制的最成本有效的[23]。与on / off电磁阀驱动减压阀(PRV)相比,PSV驱动的PRV可以连续跟踪控制信号,控制精度几乎与伺服阀相同。
在PSV驱动的减压/减压阀领域已经做了大量的工作。通过建模,模拟和实验方法研究了不同类型的这些系统的静态和动态特性[24],[25]。然而,在所有这些现有研究中,使用分析方法,并且在实践中对于离合器致动器系统不容易实现方法。离合器致动器系统不仅对扰动不太敏感,而且对于低成本,强鲁棒性和精确跟踪控制性能的要求不太敏感。因此,有意义的是设计一个简单而有效的控制器,并研究PSV操作PRV的实际离合器控制应用的详细研究。
本文旨在对PSV操作的PRV进行更详细的分析,用于重型自动变速器的真实离合器执行器系统。对于系统建模,PSV的稳态和动态特性,PRV的线性化输入输出传递函数和湿式离合器致动器都被考虑。为了实现离合器致动器系统的成本有效和简单的要求,应用了具有高速PSV作为先导级的典型的三级结构。已经研究了模拟和实验结果,包括电压信号的变化对比例电磁阀对阀性能的有效性。
本文的其余部分安排如下。在第二部分,我们介绍离合器执行器系统的系统设计,操作原理和系统建模;在第三部分,仿真模型将与实验数据验证;为此,第四节中给出了模拟和实验结果,显示了开发系统的动力学性质。
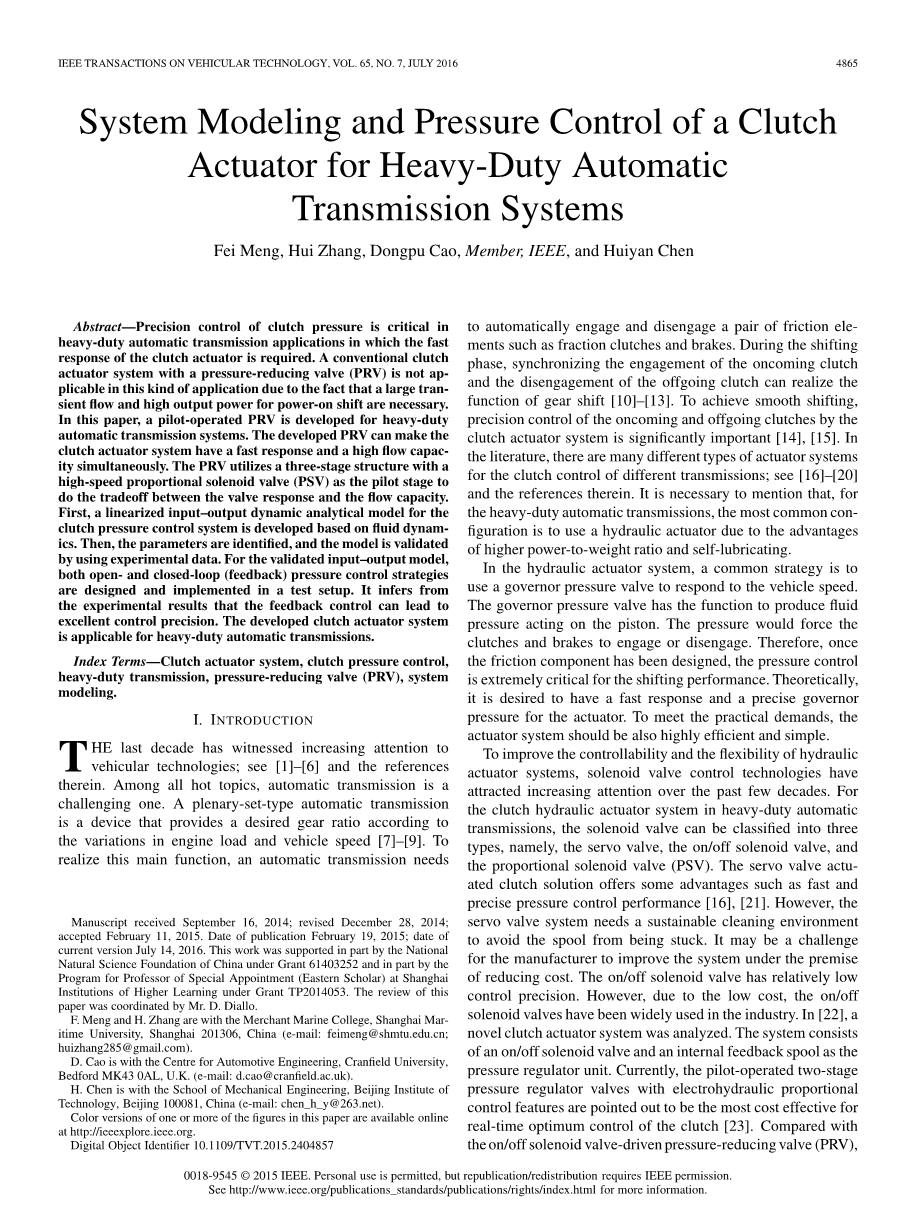
图1.系统工作原理。(a)离合器致动器控制系统的示意图。 (b)离合器填充过程中的活塞和PRV运动。
手稿收到2014年9月16日; 修订于2014年12月28日;接受2015年2月11日。出版日期2015年2月19日; 当前版本的日期2016年7月14日。这项工作部分由中国国家自然科学基金会授予61403252资金部分支持,部分由特殊任命教授(东方学者)在上海高等教育机构的计划支持,批准TP2014053。迪亚洛先生协调了本文件的审查。
F. Meng和H. Zhang与上海海事大学商船学院,上海201306(电子邮件:feimeng@shmtu.edu.cn; huizhang285@gmail.com)。
D. Cao与英国贝德福德MK43 0AL,克兰菲尔德大学汽车工程中心(电子邮件:d.cao@cran fi.ld.ac.uk)。
陈晓波,北京理工大学机械工程学院,北京100081(电子邮件chen_h_y@263.net)。
本文中一个或多个图的颜色版本可在http://ieeexplore.ieee.org在线获得。
数字对象识别符10.1109 / TVT.2015.2404857
II.系统操作原理和系统建模
这里,将介绍离合器致动器系统的工作原理。 因此,基于介绍,建立了每个部件的建模工作。
- 操作原理
用于重型自动变速器的离合器致动器系统的PSV引导的PRV如图1所示。如图1(a)所示。
该系统可实现自动化和高质量的离合器控制。该系统分为三个部分,即PSV,PRV和离合器/制动器组件部件。PSV的主要功能是接收控制信号并提供控制压力以操作PSV。PRV用于控制从泵流入离合器室的高压流体。此外,离合器/制动器组件部件可以接合和脱离摩擦元件。
离合器/制动器接合和分离过程分析如下。 1)当通过检测发动机负载和车辆速度需要换档时,变速器控制单元(TCU)发出几个控制信号以间接控制离合器填充和倾卸。例如,在离合器填充的情况下,TCU控制信号由功率放大器元件放大,例如绝缘栅双极晶体管; 放大的电压施加到比例电
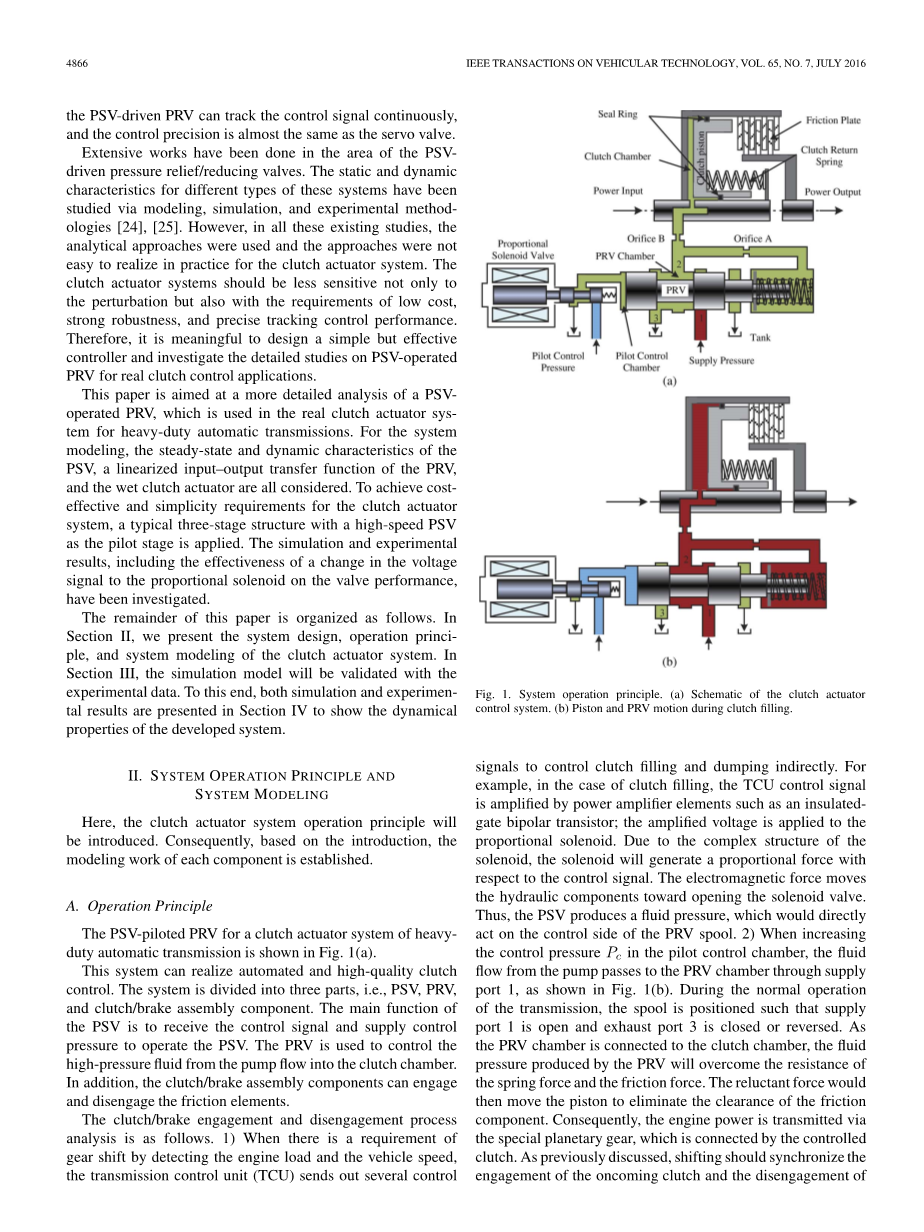
图2. PSV的稳态压力输出性能 图3. PSV的动态压力输出性能(a)上升(b)向下
磁阀。 由于螺线管的复杂结构,螺线管将产生相对于控制信号的比例
力。 电磁力使液压部件朝向打开电磁阀移动。因此,PSV产生流体压力,其将直接作用在PRV阀芯的控制侧。 2)当增加先导控制室中的控制压力P时,来自泵的流体流通过供给口1进入PRV室,如图1(b)所示。 在变速器的正常操作期间,滑阀定位成使得供给口1打开并且排气口3关闭或反转。当PRV室连接到离合器室时,由PRV产生的流体压力将克服弹簧力和摩擦力的阻力。 然后,该磁阻力将移动活塞以消除摩擦部件的间隙。 因此,发动机功率通过由受控离合器连接的特殊行星齿轮传递。 如前所述,换档应该使即将接合的离合器的接合和待分离的离合器的分离同步。 一旦离合器接合控制信号被发出,离合器分离控制信号也同时被供给。 与用于离合器接合控制的升高的电压不同,离合器分离控制将降低电压。
- 系统建模
1)PSV型:在实际的离合器致动器系统中,来自控制器的指令占空比被施加到500Hz脉冲串,并且驱动电路将脉冲信号转换为螺线管电流,如前所述。 然而,由于PSV物理模型的复杂性,使用PSV的实验输入 - 输出响应而不是导出动态模型。 在本文中,所使用的PSV是由HydraForce开发的直接作用,阀芯型和减压/泄压阀。 比例控制电磁阀产生直接施加到PRV的控制压力。 PSV的主要规格包括10-15bar的供电压力,由车辆电源提供的24V驱动电压和-40°C-120°C的工作温度范围.
PSV的稳态和动态控制压力特性如图1和图2所示。这个阀是常闭PSV,这意味着没有流出,除非施加励磁电流。近似地,类似于普通PSV,输出压力与施加到螺线管的励磁电流成比例。注意,存在范围从0到0.15A的死区。螺线管的操作区域是大约0.15-0.5A,这不同于大约0.15-0.5A的关闭过程,这不同于具有电流的关闭过程 为0-0.38A,如图1所示。显然,与大多数PSV类似,对于PSV的输出压力,由于磁性材料的特性,在施加到螺线管的上升和下降励磁电流的过程中存在滞后效应。
图3示出当向螺线管施加开/关24-V电压时的电流和压力阶跃响应。当脉冲开启时,电流响应可以分为两个相位。第一阶段是初始牵引阶段,在该阶段磁力克服弹簧力并移动柱塞。PSV完全打开。PSV的平均压力响应时间约为9ms,如图6所示。另一个阶段是电流达到最大值,约为1.15A。当脉冲关闭时,柱塞移动以关闭输入端口并返回到初始位置。该过程从最大值持续约5毫秒到零压力。
2)PRV型号:为了分析管线压力调节系统的行为,我们首先考虑主室内的动力学。PRV的简化结构如图1所示。PRV的功能是放大用于离合器芯片控制的功率。为了防止摩擦片失效,最好减少摩擦片的滑动时间。PRV不仅应满足功率要求,而且应具有快速响应。因此,进一步探索PRV建模和设计是重要的。在下面,我们将介绍PRV分析的详细模型。
模拟过程将忽略由于泵充分补充导致的油道泄漏和流体油的压缩,其现象是右侧检测室的压力不能达到供给压力。 由于阀芯位置与其平衡的变化较小并且相对较慢,因此这里仅考虑静态流。 然后,线轴运动方程可以描述
(1)
其中Pc是控制压力,Sc是阀芯开始面积,Pd是右感测室的压力,Sd是阀芯端面积,Ms是阀芯质量Ke=Ks 0.43w(Pz0-Po0) 表示流动力弹簧刚度,Pz是供给压力,Po是减小的压力,Pz0和Po0压力的标称值.Ks是弹簧刚度,w是主孔的面积梯度,xm表示阀芯位移。
应用(1)的拉普拉斯变换:
(2)
如前所述,对于离合器 - 离合器自动变速器控制,来回和离开的离合器控制应该同步。 这推断出需要分别考虑PRV的两种情况,即离合器填充和倾倒阶段。在离合器填充过程(xmge;0)中,如图6所示。 如图4所示,由PSV控制输出的控制压力直接作用于PRV。 当控制压力增加时,阀芯向右移动,供应口将打开。 然后,高压流体可以流入连接到离合器室的PRV室。 受压流体向前推动离合器活塞。 右感测室的流量将随着PRV打开过程而改变。 基于连续理论,右感应腔室的连续性方程可以通过:
(3)
其中Qin和Qout分别表示流入和流出所感测的室的流体。beta;是流体的体积弹性模量,P是压力。V是感测的室的体积。考虑到阀芯的运动方向,体积可以表示为:
(4)
其中Vin it是所感测的室的初始体积。 流体通过通道流入感应腔室。 限流器的连续性方程可以用以下线性方程获得:
(5)
其中Kd是水渠的流动压力系数。
被感测的室的泄漏被忽略。 因此,在一些操作之后,可以从(3) - (5)获得右感测室的线性化连续表达式:
(6)
右感测室P的压力可以通过(6)求解。 将其代入(2)在一些操作后产生:
(7)
其中omega;0=beta;eKd / Vd是右感测腔室的中断频率。定义机械固有频率为omega;n= (K e/ Ms)1/2。将其代入(7):
(8)
控制室的线性化连续表达式可以表示为 (9)
其中Kc是PRV输入通道的流量压力系数,QL是离合器流量,Kq是PRV输入通道的流量增益,Kl是泄漏系数,Vt是PRV腔室的总容积。
使用(9),我们可以获得以下等式:
(10)
其中omega;1=beta;eKac / Vt是PRV腔室的断裂频率,Kac = Kc 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139502],资料为PDF文档或Word文档,PDF文档可免费转换为Word

