英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
利用虚拟扬声器加权法对封闭空间中的混合扬声器阵列的优化设计
a清华大学汽车安全与节能国家重点实验室汽车工程系,北京,中国
b长安汽车全球研发中心,重庆长安汽车有限公司,重庆,中国
摘要:为了实现宽频带的声场再现,多种类型的扬声器正在被使用。再现精度不仅受到发送给扬声器的信号的影响,还取决于每种扬声器的位置和数量。本文研究了混合扬声器阵列的优化方法。提出了一种虚拟扬声器加权方法来优化每种扬声器的位置和数量。在这种方法中,提出了一个虚拟扬声器模型来量化扬声器数目增加时扬声器阵列可控性的增量。在优化混合扬声器阵列的同时,使用虚拟扬声器传递函数的增益来确定候选扬声器位置的优先级,从而优化每种扬声器的位置。然后,使用虚拟扬声器传递函数的相对增益来确定扬声器是否是冗余的,这优化了每种扬声器的数量。最后通过乘用车室内声场的再现实验验证虚拟扬声器的加权方法。结果验证了所提出的方法能够得到最优的混合扬声器阵列。
关键词:封闭空间 声场再现 多种类型的扬声器 阵列优化 虚拟扬声器
1、介绍
数十年来,空间声场的再现一直是人们关注的问题。在声场再现方法中,高阶高保真度立体声响复制 (HOA) [1–3]和波场合成(WFS) [4–6]被广泛研究。HOA和WFS可分别被认为是模式匹配方法和表面积分方法[7]。实际上,这些用于声场再现的方法必须克服由实际声音再现系统带来的限制。也就是说,必须将它们应用于有限空间支持的离散扬声器分布,改变方向性和可能的多路径传播,而监听域具有有限的尺寸。在一个封闭的空间里,边界的反射也需要在使用这些方法时加以解决。
在封闭的空间中再现声场的同时,通过多个声压点匹配来实现声场再现的场匹配方法[7]是切实可行的。其中最早的一个关于场匹配方法的研究是由Kirkeby和Nelson于1993年开发的[8]。然后,许多研究集中在场匹配方法[9-11]。在实施中,为了在宽频带中实现声音再现,总是需要多种类型的扬声器。例如,使用包括低音扬声器,超低音扬声器和扬声器在内的多种类型的执行器,以便在50 Hz〜10 kHz范围内实现航空器的声音再现[12]。在低频时,使用4个标准汽车音频扬声器和高频率的8个头枕扬声器,以便在完整的音频带中实现个人音频声音[13]。在这些研究中已经讨论了多种类型的扬声器对于声音再现的重要性,但是如何确定每种扬声器的位置和数量仍然是一个问题。
为了尽量减少声能泄漏和再现误差,Lilis提出了一种最小绝对收缩和选择算子(Lasso)来选择不同频率的扬声器的相应位置[14]。Radmanesh提出了一种结合套索和最小二乘法(LS)的两阶段算法,用于隔离宽带声音再现[15,16]。这两种方法可以优化扬声器位置,但是混合扬声器阵列中扬声器的最佳数量难以用套索法确定。
Asano基于扬声器与控制点之间传递函数的相关性,研究了在宽频带内扬声器配置的优化,并且使用Gram-Schmidt正交化来计算传递函数的相关性[17]。使用类似的优化思想来减少扬声器和麦克风的数量[18],并发现使用该方法获得的优化的源阵列也可以实现良好的再现准确性。
Khalilian描述了一种约束匹配追踪算法来优化扬声器的位置[19-21]。该算法首先基于期望的声场设计目标声传递函数,然后选择扬声器的位置以使实际的声传递函数最接近于目标声传递函数。
一些搜索算法,如遗传算法(GA),模拟退火算法(SAA)等,也被认为是对声音再现系统的优化。为了找到一个最佳的扬声器阵列来平衡具有串音消除的三维音频系统的性能和鲁棒性,Bai提出了一种结合Taguchi方法和遗传算法[22]的方法。为了实现个人音频系统,Coleman根据亮区和暗区之间的对比度表现,明亮区域内声场的阵列和平面性,评估了各种控制系统的性能,然后采用序列正反向搜索(SFBS)优化控制系统的配置[23,24]。Olik研究了不同的系统配置,以一阶反射[25]让不同的个人声音再现。枚举方法被应用于为汽车客舱内个人音频系统的高频率扬声器配置提供设计指导[26]。
上述研究已经验证了这些搜索算法可以有效地优化再现系统的配置,但是大多获得不对称的源阵列。上述方法几乎没有考虑宽频带混合扬声器阵列的优化问题。本文提出了一种虚拟扬声器加权方法来解决这个问题。第2节描述了用于计算空间声音再现的扬声器阵列的权重的方法。第3节提出了一个虚拟扬声器模型来量化扬声器阵列的可控性。虚拟扬声器传递函数的增益被用于确定候选扬声器位置的优先级,这优化了每种扬声器的位置。虚拟扬声器传递函数的相对增益被用于确定扬声器是否是冗余的,这优化了每种扬声器的数量。第4节描述了在一个宽频带内多种扬声器阵列的优化。最后在第5节中,实验结果验证了所提出的最佳混合扬声器阵列可以达到很好的重现精度。
2、封闭空间内的声场再现
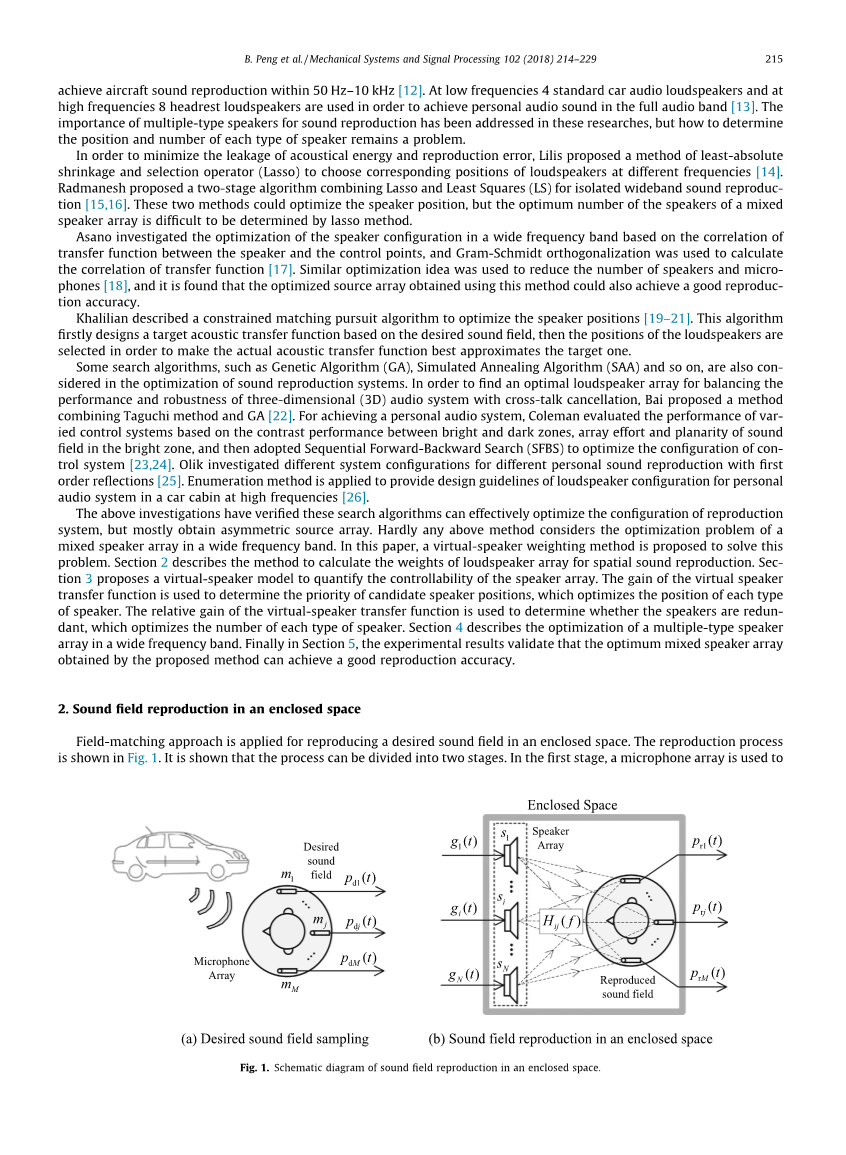
应用场匹配方法在封闭空间中再现期望的声场。再现过程如图1所示。结果表明,这个过程可以分为两个阶段。在第一阶段,麦克风阵列被用来获取期望的声场。在满足空间采样定理的同时,所需的声场可以用多个控制点的离散声压来表示[10]。采集之后,可以获得所需的声压矢量pd(t)=[pd1(t),pd2(t),hellip;,pdM(t)],其中M是麦克风的数量。
期望的声场
再现声场
扬声器阵列
麦克风阵列
图1 封闭空间中的声场再现示意图
在第二阶段,扬声器驱动信号矢量g(t)=[g1(t),g2(t),hellip;,gN(t)] 用于控制扬声器阵列,其中N是扬声器的数量。再现的声压矢量pr(t)=[pr1(t),pr2(t),hellip;,prM(t)]可以使用相同的麦克风阵列来获得。
由于再现系统的不适定性的,Tikhonov正则化被用来寻找一个更强大的解决方案。规则化的声场再现问题可以在频域中表示为:
[||Pr(f)-|| lambda;2(f)||] (1)
在公式(1)中,||·||2代表矢量的2范数。Pr(f),Pd(f)和G(f)分别表示傅里叶变换pr(t),pd(t)和g(t)。lambda;(f) 是正则化参数并且lambda;(f)gt;0。在封闭的空间,可以用公式(2)来描述g(t)和p r(t)之间的传递关系。
Pr(f)= G(f)H(f) (2)
在公式(2)中,H(f)是再现系统的电声传递函数矩阵,可以描述为公式(3)。
G(f)= Pd(f)HH(f)[H(f) HH(f) (f)IN]-1
在公式(4)中,[·] -1意味着矩阵求逆,(·)H意味着矩阵的厄米转置。IN是维数N的单位矩阵. lambda;L(f) 是使用L曲线方法确定的正则化参数[27]。
公式(4)意味着G(f)的质量受到H(f)的影响,这意味着再生误差的潜在下降受到H(f)的限制。在确定麦克风阵列的同时,由封闭空间的声学特性,H(f)由扬声器的辐射特性和布置来确定。因此,通过优化扬声器的位置和数量来改进H(f),可以减少再现误差。
3、使用虚拟扬声器模型的可控性加权
为了优化在宽频带中用于声音再现的混合扬声器阵列,提出了一种虚拟扬声器加权方法。在该方法中,可以使用由下面引入的虚拟扬声器模型量化的扬声器阵列的可控性增量来确定候选扬声器位置的优先级。
首先,将位置序列号集合表示为R={1,2,hellip;,u,hellip;,N},其中u是候选位置的序号。然后,Hu(f)被定义为在第u个位置处的扬声器的传递函数向量,如公式(5)。
Hu(f)=[ Hu1(f),Hu2(f),hellip;,HuM(f)]
3.1、单扬声器条件下的可控权重
在声音再现控制中,可控性是指声源控制控制点声压的能力。当第u个位置只有一个扬声器时,可控制性可以直接反映在扬声器传递函数的增益上。增益越大可控性越大。所以单扬声器的可控性可以通过传递函数向量的2范数来量化,它代表了扬声器在频率f处对麦克风阵列的整体增益。扬声器获得最大增益的候选位置表示为v1(f),其被定义为公式(6)。
在这个位置上的扬声器的可控增量Cv1(f)是利用公式(7)。
递增用于强调通过增加一个扬声器引起的可控性。在下面的章节中,当新的扬声器被添加到扬声器阵列中时,将使用可控增量来描述由新扬声器引起的阵列的增加。
3.2、多扬声器条件下的可控权重
虽然在扬声器阵列中有多个扬声器,但由于扬声器传递函数的增益不能直接量化由位置u处的另一个扬声器引起的可控制增量,因为存在不同扬声器之间的声场耦合。在这种情况下,可控性增量通过虚拟扬声器传递函数的增益来量化。
当j(1le;j<M)个扬声器(s1,s2,hellip;,sj)处于最佳j位置时,其位置分别记为v1(f), v2(f),hellip;, vj(f)。因此,j个扬声器的位置集合Rvj(f)由方程(8)表示。
Rvj(f)={ v1(f), v2(f),hellip;, vj(f)}
然后,可以从剩余的位置中选择扬声器应该引起最大可控性增量的第(j 1)个位置。
如图2所示,如果第 j 1个扬声器sj 1放置在位置u,则由sj 1产生的声音可以分为两部分:
(1)前j个扬声器可以产生的声音;
(2)只有虚拟扬声器j 1可以产生的声音。
由sj 1产生的声音的第一部分是在前j个扬声器的声音所产生的空间S j中。这部分声音对扬声器阵列的可控性没有贡献,因为它可以被前面的j个扬声器的声音所取代。
由sj 1产生的声音的第二部分是空间SM-j,它与空间S j无关。声音的第二部分可以提高扬声器阵列的可控性,并且被认为是由虚拟扬声器产生的。
虚拟扬声器模型如图3所示。所以S j的传递函数向量Hu(f)也可以分为两部分:
(1)u(f):Hu(f)在空间S j的投影;
(2)u(f):空间中的Hu(f)的投影和虚拟扬声器sj 1的传递函数矢量。
利用前面的j个扬声器的传递函数向量可以得到空间S j,如公式(9)。
S j=span{ Hv1(f),Hv2(f),hellip;,Hvj(f)}
因此,可以使用前面的j个传递函数向量的线性组合来表示u(f)。空间S M-j是S j的补充空间。那是,
S M=S M-j S
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[466641],资料为PDF文档或Word文档,PDF文档可免费转换为Word

