英语原文共 14 页
与前馈相关的VSC-HVDC的次同步扭转相互作用电流控制器的补偿
摘要
涡轮发电机单元与高压直流电(HVDC)系统之间的次同步扭转相互作用(SSTI)行为一直是电力系统中重要的研究内容。过去,具有线换向变换器(LCC)-HVDC的SSTI的特性已经得到了很好的研究。 随着基于电压源转换器(VSC)的HVDC的发展,一些研究人员发现转换器的不同控制参数对系统中连接的同步发电机的电气阻尼有冲击影响。但是,现有结果并未显示SSTI的具体机制。 在这项研究中,研究了具有VSC-HVDC的SSTI,其受到AC电流控制器中的电压前馈(VVF)补偿的影响。不对称VVF在d轴和q轴上对电阻尼的影响值得特别关注。首先,开发了集中在交流电流控制器上的VSC-HVDC的通用输出阻抗模型。然后研究补偿因子(和滤波器带宽()对转换器带宽和电阻尼的影响。最后,给出了基于前者分析的SSTI抑制方案。在PSCAD / EMTDC中进行仿真研究,仿真结果验证了分析结果和提出的抑制方案。
1引言
如今,随着风电和光伏等可再生能源发电的快速发展,以及新技术在柔性交直流传输系统等电力系统中的应用[1],电压源转换器(VSCs)被广泛应用于电力系统。因此,VSC的评估,包括其电路参数,控制策略和控制参数,对电力系统的稳定性已成为一个非常重要的研究课题[2,3]。研究VSC-高压直流电(HVDC)对次级同步扭转相互作用(SSTI)[4]与附近涡轮发电机(TG)单元的影响最重要的一个主题是值得研究的。
过去,具有线换向变换器(LCC)-HVDC的SSTI的特性已经得到了很好的研究。在这种情况下,LCC-HVDC的存在降低了净阻尼,并将与附近的同步发电机(SGs)一起导致SSTI。许多研究人员提出了几种抑制或抑制振荡的方法和技术,例如应用次同步阻尼控制器[5]。
然而,与传统的LCC-HVDC相比,很少有研究报道VSC-HVDC对SSTI的影响和抑制策略的发展。一些文献表明,VSC可能对相邻TG单元的阻尼有影响,但其极性和大小与其特定的控制策略和参数密切相关。文献[6]基于对VSC输出阻抗的建模和分析进行了研究,并且研究表明,如果在一些控制参数的情况下VSC输出阻抗对于某些频率具有负实部。因此,VSC可能对系统产生负阻尼。 在文献[7]中,提出了一个小信号模型来考虑VSC之间的动态相互作用。但是,该模型没有考虑交流电流回路。在文献[8]中,已经表明基于VSC的系统可以通过其增量输出阻抗/导纳与电附近的同步电机相互作用,并且可以通过重新整形输出阻抗来抑制相互作用。在文献[9]中,转换器的输出阻抗由改进的控制方法形成,以满足阻抗稳定性要求,但没有给出电网电压前馈对系统的影响。
在一般意义上,VSC的参数,如比例积分(PI)控制器和滤波器,是考虑到转换器的性能而设计的[10]。通过改变控制器和电路参数来增加VSC的输出阻抗是不合理的。此外,在一些实际工程应用中,交流电流控制器中的电压前馈(VVF)不对称,并且尚未研究非对称VVF对SSTI和系统阻尼的影响。
在上述研究的推动下,研究了在AC电流控制器中受VVF影响的VSC-HVDC的SSTI。可以看出,由于不同的控制参数,d轴和q轴上的不对称VVF对电阻尼具有不同的影响。然后,本研究提出了一种简单有效的抑制方案,该方案基于公共耦合点(PCC)q轴电网电压和带通滤波器的改进VVF,以增强系统电阻尼。所提出的抑制方案不仅可以在不改变PI控制器和硬件参数的情况下简化控制器设计,而且与d轴和q轴中使用的电网电压相比也可以实现类似的补偿效果。
本文的其余部分组织如下。 第2节给出了所研究的电力系统的详细模型,包括SG建模和VSC建模。第3节分析了对称和非对称VVF对电阻尼的影响。第4节介绍了基于前一种分析的SSTI抑制方案。第5节介绍了时域仿真的结果,以证明所提出的抑制方案的适用性。结论见第6节。
2 系统建模
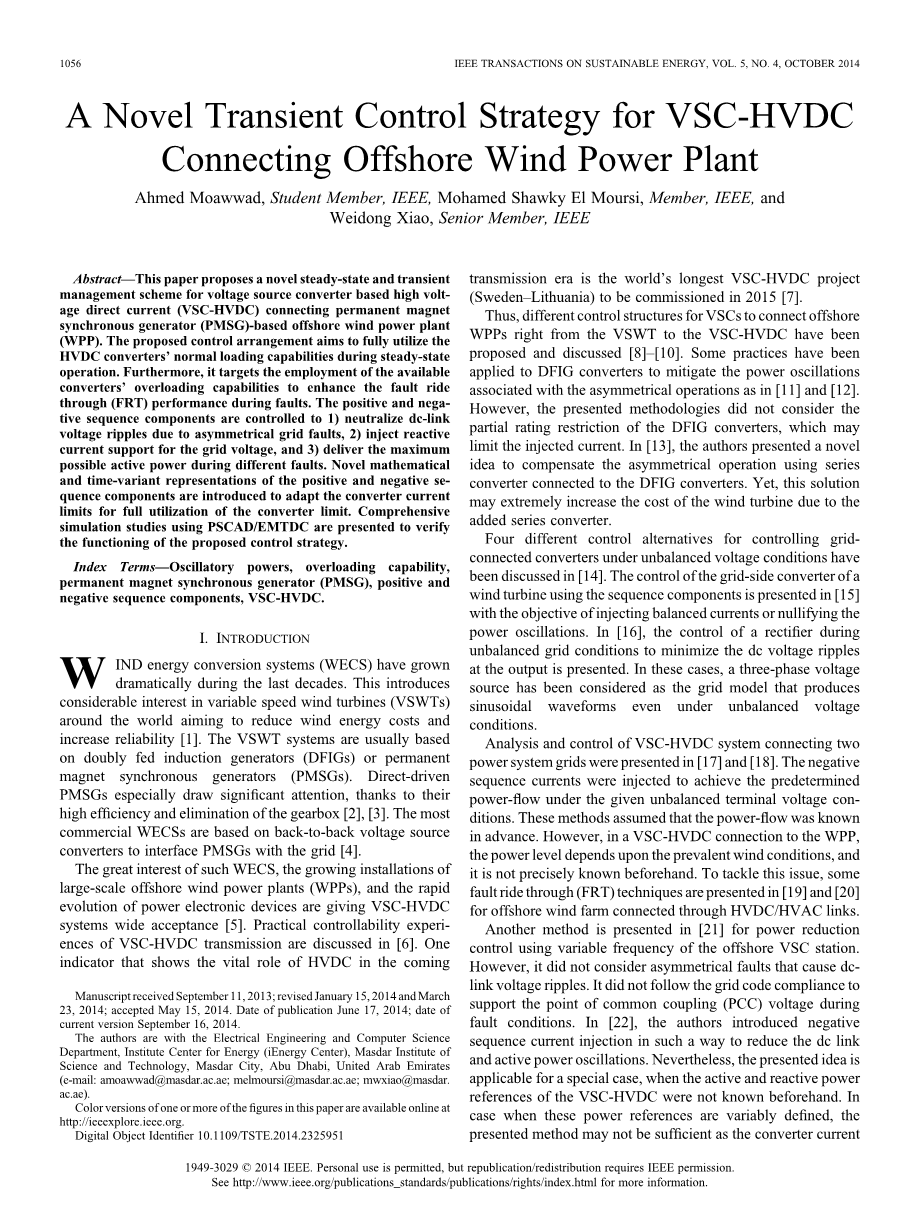
在这项研究中,所研究的电力系统基于IEEE第一基准模型进行亚同步谐振(SSR)研究,没有串联补偿[11]。所研究系统的结构如图1所示。该系统由具有多质量涡轮机的同步电机组成,其通过输出阻抗连接到PCC,该输出阻抗包括变压器泄漏电感。此外,还有两个连接到PCC的其他元件:具有无限源的栅极,其具有阻抗和具有等效阻抗的VSC-HVDC。和是发电机端电压和输出电流,是转子速度。 和是VSC-HVDC的输出电压和电流。和是无限电源的输出电压和电流。假设所有变量都以每单位数量表示。
图1 研究系统图
2.1 网络建模
需要在dq坐标系中分析正在研究的整个系统,并且必须将网络阻抗从坐标系转移到该系。因此,可以通过用代替s来获得该系统中的阻抗,其中是系统基本角频率。网络阻抗在dq坐标系中假设为,并且可以表示为式(1)。其中是等效的网络电感,是网络电阻。
2.2 同步电机建模
凸极同步电机通常在dq转子参考系中建模。
其中I是同步电机绕组电流矩阵,V是电压矩阵,L是电感矩阵,R是电阻矩阵,N是速度电压矩阵。系统在工作点上线性化,同步电机的电传递函数模型可表示为
图2显示了状态变量之间的关系,其中A,B,C和D是状态空间矩阵。所有的模型矩阵,推导过程都在文献[12]中说明。根据复扭矩系数法[1],系统的电阻尼可表示为
图2 同步发电机的电传递函数模型
2.3 VSC-HVDC建模
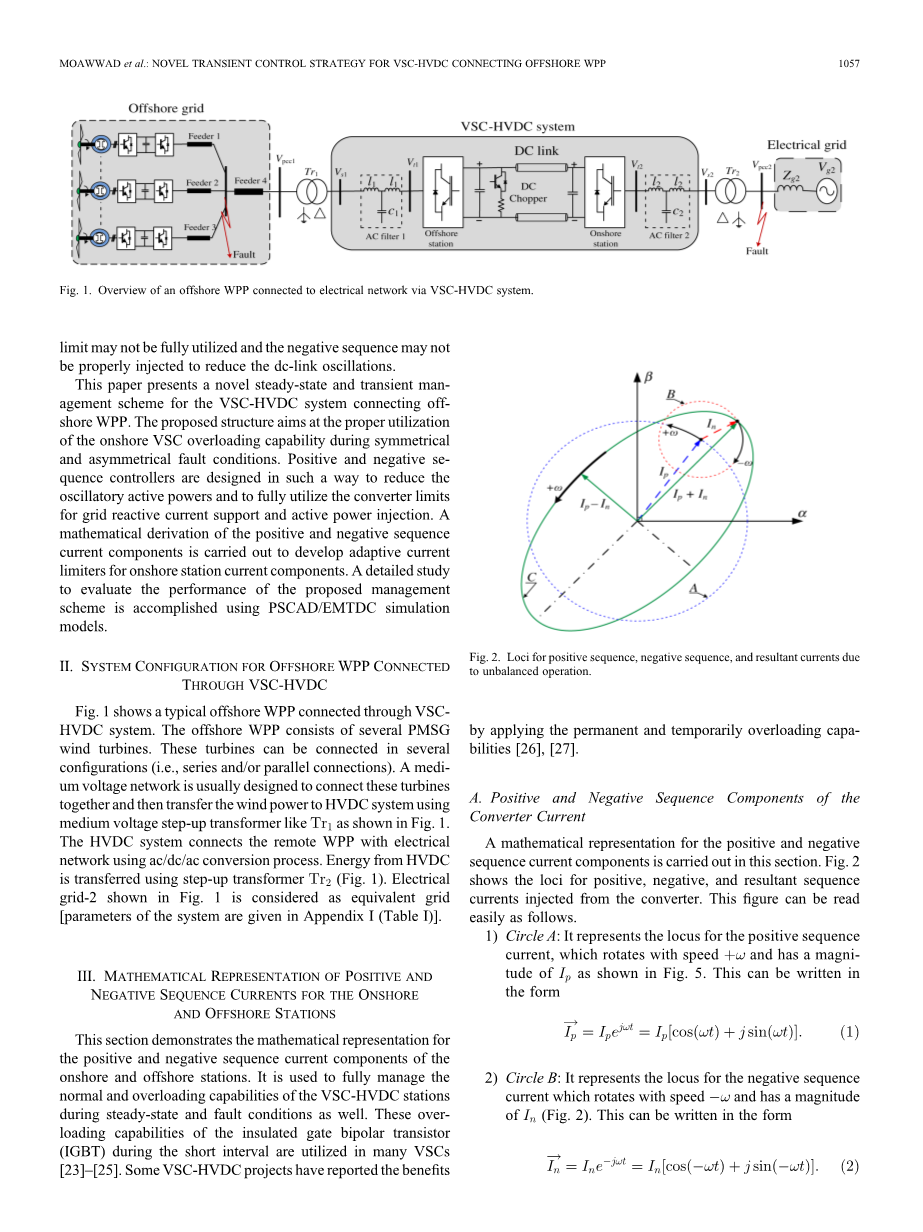
本研究的重点是VSC-HVDC电网侧交流电流控制器,其控制结构如图3所示。以下VSC的动态方程在同步参考系中
图3 电网侧交流电流控制器的结构
交流电流控制器通常由PI控制器,交叉耦合项和VVF组成。电流控制的功能是使跟踪参考,并且VVF增强电流控制精度以抵抗电网电压干扰。图4给出了交流电流控制器的示意图。 控制算法可以是
图4 交流电流控制器示意图
其中由一阶低通滤波器馈送的电网电压,是滤波器的d轴和q轴带宽,,是表示电压补偿程度的电网电压补偿系数。脉冲宽度调制(PWM)转换器的开关频率通常大于1 kHz,与控制系统相比非常快。因此,我们可以假设。 结合(6)和(5),我们可以得到以下等式:
从(9)可以看出,由两部分组成:闭环电流控制动态fcc(s)和等效输出阻抗。因此,在(10)中获得VSC的等效阻抗矩阵的结果表达式作为对角矩阵。矩阵的对角元素可以分别被视为和
因此,从同步电机看到的等效网络阻抗给出为
3 受VVF影响的电气阻尼
3.1 系统参数
正在研究的系统基于IEEE第一基准模型,连接了892.3MVA VSC-HVDC。同步电机的电气参数可以在文献[11]中看到。发电机的多质量涡轮机由六部分组成,即高压气缸,中压气缸(IP),低压气缸A(LPA),低压气缸B(LPB),发电机(GEN)和励磁机(EXT)。扭转模式和频率列于表1中。在下面的图中,这些扭转模式将以小点的形式标记在x轴上。
表1多质量涡轮机和扭转模式
模式 HIP-IP IP-LPA LPA-LPB LPB-GEN GEN-EXT
频率 15.71 20.21 25.55 32.28 47.46
标幺值 0.31 0.40 0.51 0.65 0.95
为简单起见,VSC-HVDC模型仅关注AC电流控制器,考虑VVF的影响。当电流回路的动态响应保证稳定时,电流控制器的带宽通常选择为开关频率的20%。当开关频率为2kHz时,基于50Hz的工频,带宽为8pu。滤波器电感和电阻分别为0.15和0.015pu。因此,和可以计算为,。具体的设计方法可以在文献[8]中找到。等效网络电感为0.33 pu,表示弱电网,忽略网络电阻。系统电阻尼的相应数值计算通过使用MAPLE完成。
3.2 具有对称VVF的交流电流控制器
当交流电流控制器中的VVF在d和q轴上对称时,VSC的等效阻抗是对称的。只有当整个系统的阻抗为正时,系统才会消散干扰的能量,这反映了正阻尼特性。VSC阻抗的实部可以通过(10)计算,并且当VSC的阻抗为正时
为了减小负阻抗的范围,优选小的或。图5示出了同步电机直接连接到VSC-HVDC而的情况。 它表明和都会增加VSC等效阻抗的负频率范围,并增加系统的负阻尼区域。因此,更多的扭转模式将进入负阻尼区域,这更可能激发SSTI。然而,与转换器的动态性能密切相关,不能任意改变。因此,应更加注意VVF对系统电阻尼的影响。
图5积分系数和对称VVF对输出阻抗和电阻尼的影响
3.3 具有不对称VVF的交流电流控制器
根据上述研究,低通滤波器带宽对系统阻尼有很大影响。另外,在一些实际系统中,由于不同的控制方法和策略,以及一些实际项目的实际需要,d轴和q轴电压前馈可能不同。这意味着滤波器带宽和,以及电网电压和的补偿程度可能不相同。上述四个参数对系统电阻尼的影响分别如图6至图9所示。
图6 对系统电阻尼的影响
图7 对系统电阻尼的影响
图8 对系统电阻尼的影响
图9 对系统电阻尼的影响
系统参数是P = Q = 0并且,。在图6和7中,只有d轴具有电压前馈补偿。图6显示从0.2变化到1.0pu,而对系统电阻尼的影响不明显,即使在的范围内也不显着。图7显示从0.5变化到1.5pu,而,对系统电阻尼的影响也不明显,系统电阻尼在范围内下降得更明显。
与上述现象相反, 在图8和9中,只有q轴具有电压前馈补偿。在图8中,随着从0.2增加到1.0pu,中频和高频()频带的系统电阻尼与变化相比有显着下降。随着的增加,较高频率的扭转模式将首先进入负阻尼区域。图9示出了当增加时,中频带中的系统电阻尼()减少很多。阻尼最低点的频率也在增加。这将导致低频扭转模式首先进入负阻尼区域。结果,与d轴相比,q轴的电压前馈补偿对系统电阻尼具有决定性影响。造成这种现象的原因主要是由于同步电机的d轴和q轴电位的不对称性。随着q轴滤波器带宽和电压补偿度的增大,系统阻尼将显着减小,这将导致更多的扭转模式处于负阻尼区域,增加SSTI的概率。
4 建议的SSTI抑制方案
根据上述研究,q轴电压前馈对系统电阻尼的降低起着决定性的作用。因此,通过修改q轴电压前馈控制来创建额外的有源阻抗并避免SSTI是合理的。所提出的SSTI抑制方案可以在图10中看到。该方案基于使用由传递函数处理的q轴电网电压,并且输出信号在电流控制环路之前的求和点处相加。在瞬态过程中,同步机端子电压的幅度与转子速度成比例,这意味着电流和电磁转矩也与转子速度成比例。通过使用电流环的快速调整,所提出的SSTI抑制方案可以快速注入阻尼信号以增强系统阻尼。可以设计为带通滤波器,其产生零DC增益并且有助于围绕中心频率整形转换器阻抗而不影响外环动态。添加有源阻尼后,原始VSC等效q轴阻抗更新为
(见(14))
图10 建议的SSTI抑制方案
应设计的参数,以便使次同步区域中的正阻抗和系统电阻尼最大化,尤其是在扭转模式附近。设计了一种弱阻尼系统,系统参数为,,, 可以更清晰地显示主动阻尼方法的有效性。在这种情况下,存在一个大的负电阻尼区域,这可能导致一些扭振模式在扰后不稳定。图11和12示出了相应的系统电阻尼曲线以及具有和不具有SSTI抑制的的的参数是,,,;,,,。很明显,在不同系统情况下,采用SSTI抑制方案的和系统电阻尼的实部在子同步区域变为正。因此,所有扭转模式都将处于正电阻尼区域。
图11 的输出阻抗和系统电阻尼(实线:未补偿),(虚线:补偿),p=0 p.u
图12 的输出阻抗和系统电阻尼(实线:未补偿),(虚线:补偿),p=1.0 p.u.5
5 时域仿真结果
为了验证所提出的主动抑制方案的分析结果和有效性,在PSCAD / EMTDC中建立了如图1所示的详细时域模型。同步电机和网络参数可以在IEEE第一基准模型中找到。忽略VSC-HVDC的功率控制环和锁相环,VSC-HVDC的参数在3.1节给出。通过监测质量LPB-GEN和GEN-EXT之间的机械扭矩来确定系统的稳定性。瞬态干扰(三相故障)在t = 8.0 s时发生10 ms以激发系统动态。如图13所示,当VSC-HVDC未连接到系统时,可以清楚地看到扰动后的系统可以快速恢复稳定性,相应的扭转模式处于正阻尼区域。图14示出了当具有对称VVF的VSC-HVDC连接到没有抑制方案的系统时,轴的质量之间的扭矩明显地被激励并且不会聚。这表明VSC在系统上引入了负阻尼。图15示出了VSC-HVDC对SSTI的影响,其中q轴上提出了抑制方案。 清楚地表明,SSTI抑制方案改善了系统阻尼和SSTI的发生。
图13系统未连接VSC-HVDC时的和
图14 系统与VSC-HVDC连接时,未采取抑制方案的和
图15 系统与VSC-HVDC连接时,采取抑制方案的和
6 结论
在这项研究中,研究了具有VSC-HVDC的SSTI受AC电流控制器中的电压前馈(VVF)补偿的影响。研究了不对称VVF在d轴和q轴上对电阻尼的影响。它表明,q轴电压前馈对系统电阻尼的变化起着决定性的作用。提出了一种SSTI抑制方案,该方案使用由带通滤波器处理的q轴电网电压。所提出的抑制方案不仅可以在不改变PI控制器和硬件参数的情况下简化控制器设计,而且与在d和q轴中使用电网电压相比也可以实现类似的抑制效果。时域仿真结果验证了分析结果和提出的抑制方案。<!--资料编号:[5814]

