英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
永磁同步电机调速控制的混合控制器
Cetin Elmas, Oguz Ustun
摘要
This paper introduces a hybrid controller (HC) which consists of a parallel connected sliding mode controller (SMC) and a neurofuzzy
本文介绍了一种由滑模控制器(SMC)和模糊神经网络controller (NFC) for the speed control of a permanent magnet synchronous motor (PMSM) drive.
控制器(NFC)并联连接的永磁同步电机(PMSM)调速控制的混合控制器(HC)。The aim of this study is to
这项研究的目的是
zhegrave;这xiagrave;ng项yaacute;n研jiū究de的mugrave;目digrave;的shigrave;是
obtain a controller that eliminates the chattering phenomenon and provides a fast and smooth dynamic response for the speed control of
获得一个控制器,消除抖振现象,并提供了一个快速,平稳的动态响应速度控制
huograve;获deacute;得yī一gegrave;个kograve;ng控zhigrave;制qigrave;器 ,xiāo消chuacute;除dǒu抖zhegrave;n振xiagrave;n现xiagrave;ng象 ,bigrave;ng并tiacute;提gōng供le了yī一gegrave;个kuagrave;i快sugrave;速 ,piacute;ng平wěn稳de的dograve;ng动tagrave;i态xiǎng响yigrave;ng应sugrave;速dugrave;度kograve;ng控zhigrave;制
a PMSM drive.
永磁同步电机驱动。
这项研究的目的是获得一个可以消除抖振现象,并提供一个快速平稳的动态响应的永磁同步电机调速控制的混合控制器。因此,系统采用误差法,由SMC控制器得到一个快速的瞬时动态响应,由NFC控制器得到一个稳定平滑的动态响应。为了说明控制器的性能,分别对滑模控制器、模糊神经网络controller (NFC) for the speed control of a permanent magnet synchronous motor (PMSM) drive.
控制器和混合控制器进行建模仿真,并将结果相互比较,最后做详细的讨论。
关键词:滑模控制 模糊逻辑控制 神经网络 永磁同步电机驱动
1 介绍
永磁同步电机(PMSMs)在低功率的工业领域中应用十分广泛,因为它具有优越的特性,例如结构紧凑、高扭矩/重量比、高转矩/惯量比、转子损耗小等(Slemon,1994)。然而,永磁同步电机的性能对外部负载扰动非常敏感,对电机参数的依赖性很高。一些永磁同步电机控制技术,例如线性控制技术(Baik,Kim,amp; Youn,2000;Solsona,Valla,amp; Muravchik,2000),滑模控制技术( Karunadasa amp; Renfrew,1991;Lin amp; Chiu,,1998;Wai,2001)和智能控制技术(Lin,Wai,amp; Chen,1998;Rahman amp; Hoque,1998),已经发展到了可以克服速度和位置控制的相关问题。
由于拥有一个快速的动态响应,并且调速性能对电机参数的变化和外部负载扰动具有很好的鲁棒性,滑模控制技术(SMCs)在永磁同步电机的调速控制和位置控制方面得到了广泛的应用(Karunadasa amp; Renfrew,1991,Nandam amp; Sen,1990)。滑模控制技术由Itkis(tkis,1976)和Utkin(Utkin,1978)首次提出,而对滑模控制技术的应用情况的调查出自Hung(Hung,Gao,amp; Hung,1993)之手。目前,对滑模控制的基本观点是:系统的状态运动被限制为空间的预定路径,这在滑模控制里被称作滑动面,或理想的滑动面。理论上,如果系统的开关频率为无限大,则滑动面是平滑的。然而,在现实中开关系统的频率是有限的,因此滑动面不是平滑的,会产生抖动(Karunadasa amp; Renfrew,1991)。
模糊集合理论(FLCs)由Zadeh(Zadeh,1965)首次提出。在模糊集合理论提出之后,由其产生的模糊逻辑控器被广泛的应用于许多领域。模糊逻辑控制器无法用一个精确的数学模型表达,其主要部分由蕴涵模糊概念及其构成规律的一组语言控制规则集合构成(Lee,1990)。模糊变量已经经由可靠的参数和误差计算得到了相当不错的调整,而在近几年,神经网络(NNs)被用来调整这些变量。一般来说,这种控制策略被称为神经模糊控制(NFC)(Jang,1995)。神经模糊控制适用于具有多变量的非线性控制系统( Chen amp; Teng,1995;Lin amp; Lee,1991),而且它能给出一个平稳的动态响应。
最近,智能控制技术已经用来减少滑模控制中的抖动现象,其中大部分应用于调整滑动面的斜率。Brock(Brock,Deskur,amp; Zawirski,1999)等人运用模糊集合理论调整永磁同步电机滑模控制中的一个增益,Lin(Lin amp; Chiu,1998)提出了一种调整永磁同步电机位置滑模控制的滑动面的方法,Wai(2001)运用这个基于递归模糊神经网络(FNN)的策略对永磁同步电机位置控制的变量进行了调整。
本文介绍了永磁同步电机调速控制系统的混合控制策略。在驱动器中,SMC和NFC是并联连接的。这项研究的目的是获得一个可以消除抖动现象,并能提供一个快速、平滑的动态响应的永磁同步电机调速控制器。因此,采用误差法,该系统由SMC获得一个快速的瞬时动态响应,由NFC获得一个平滑的稳定平滑的动态响应。最后,控制器的性能指标由仿真实验来验证。该项实验研究使用TMS320F240芯片作为数字信号处理器(DSP),并将各仿真实验结果分别做对比。仿真实验结果表明,HC是一个可靠性高、高效率、对电机参数和外部负载扰动具有较好的鲁棒性的永磁同步电机调速控制器。
2 永磁同步电机驱动系统的建模
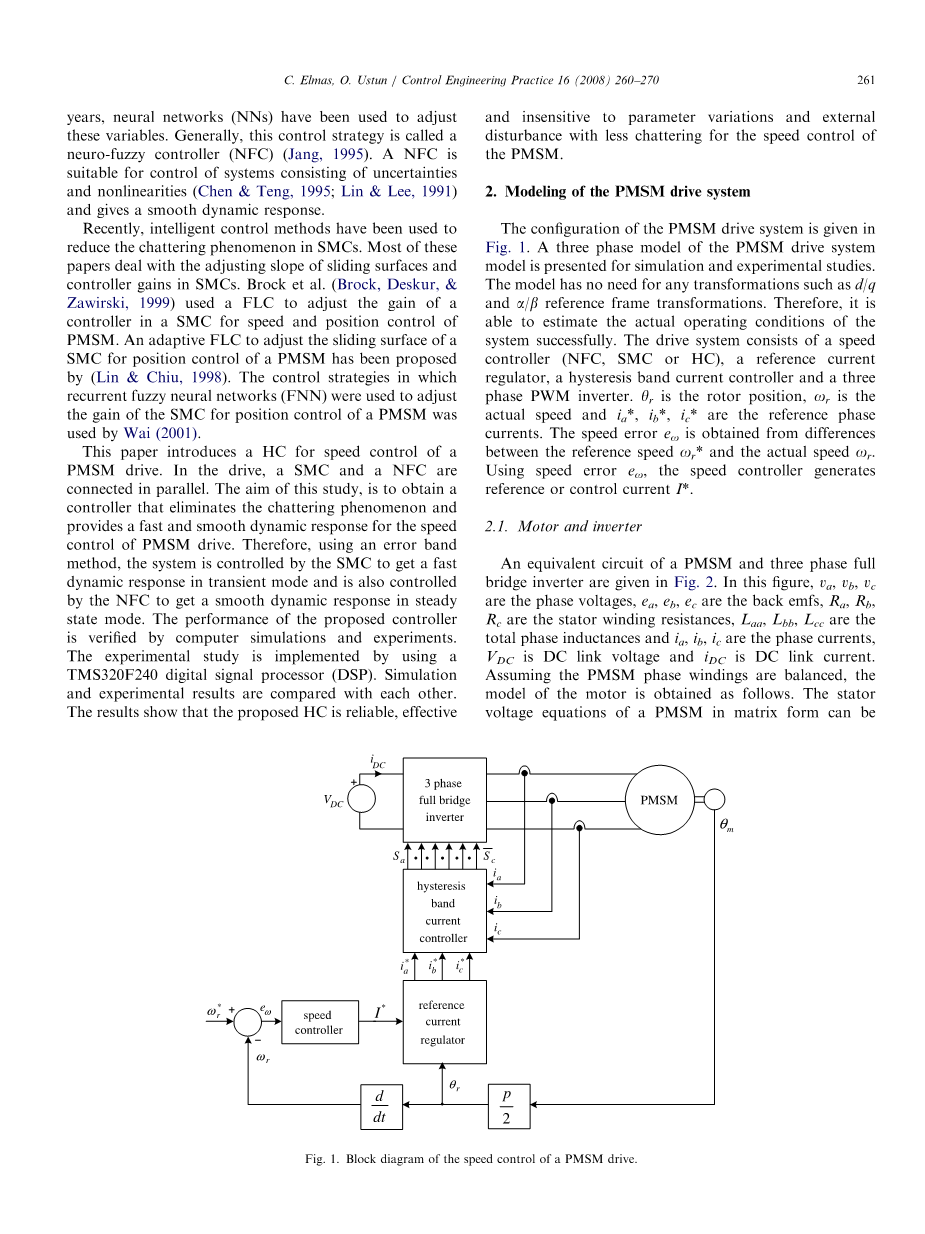
如图1所示为永磁同步电机驱动系统的结构示意图,这个三相的永磁同步电机驱动系统的模型用于仿真实验研究。这个模型不需要进行变换和参考帧变换,所以它可以成功地评估系统的实际条件。驱动系统包含一个速度控制器(NFC,SMC或HC)、一个参考电流调节器、一个滞环电流控制器和一个三相逆变器。其中,是转子位置,是实际转速,、、分别为对应的三相额定电流,转速差是设定转速和实际转速的差值。速度控制器通过转速差生成参考电流或者控制电流。
图1 永磁同步电机调速控制原理框图
2.1 电机和变频器
如图2所示,为永磁同步电机等效电路和三相整流桥电路。在图2中,、、为三相电压,、、为反电动势,、、为三相定子绕组电阻,、、为三相自感,、、为三相电流,为直流电压,为直流
图2 永磁同步电机等效电路和逆变电路
电流。假设永磁同步电机三相绕组平衡,则得到电机模型如下所示。永磁同步电机的定子电压方程可以表示为
- 式中的电感关系可以表示为
其中,为总电感(漏感 自感),为漏感,为自感,为互感,为同步电感。(1)式中的反电动势关系可以表示为
- 式中的相电流关系可以表示为(6)式中的空间状态方程。
转子的速度和位置的空间状态方程为
其中,为同步电机的电磁转矩,为负载转矩,为惯性力矩,为摩擦力矩,为永磁同步电机的极对数。
2.2 滞后脉冲宽度调制
滞后电流控制器用于产生脉冲宽度调制信号,其函数可以表示为
其中,分别表示、、,表示滞环电流控制器的函数,、、为滞环电流控制器的三个函数值,为额定相电流、、,为实际相电流、、。运用上述函数,三相电压、、可以用直流电压表示为
2.3 转矩
运用电磁场理论可以得到永磁同步电机的转矩表达式(Batzel amp; Lee,1998),转矩表达式为
假定同步电机为隐极式,运用式(11)可以得到机械转矩为
假定永磁同步电机的三相绕组为正弦绕组,则相电流可以表示为
将(13)式带入(12)式,可以得到转矩表达式
其中,为相电流幅值,可以用代替。将带入式(14),则转矩表达式为
式中电磁转矩直接与相电流幅值相关。由式(7)可以看出,电机转速与电磁转矩相关,所以,额定电磁转矩的定义式为
其中,为图1中的速度控制器的输出,称为给定电流或控制电流。
3 混合控制器的设计
滑模控制器不易受到参数变化和外界干扰的影响,虽然存在抖动,但并非自身产生,而是系统产生。特别强调的是,抖动会让控制系统在高频段运行不稳定,并且很容易受到外部因素的干扰。此外,它还会加速电机运动部件的磨损,导致电路过热。SMC有三种运行模式(直达模式,滑动模式,稳定运行模式),直达模式中不存在抖动,但滑动模式和稳定运行模式中存在抖动。NFC的有点事它不需要一个很精确的数学模型,而且它的抖动比SMC的要少得多。然而,NFC比滑模控制更加容易受到参数变化和外部扰动的影响。混合控制器的设计,吸收了它们各自的优点,而消除了它们的缺点,如图3所示。混合控制器由NFC、SMC和误差比较器构成,控制器的输入为转速差,输出为控制电流。在每种情况下,只有一个控制器运行,而误差的大小将决定哪一个控制器运行。如果转速差不在范围内,则SMC(I)运行并输出,否则FNC(II)运行并输出。误差表达式为
其中,为误差变量,为正值。
3.1 滑模控制器的设计
永磁同步电机调速控制系统的滑模控制器如图3所示。SMC的准确模型由Karunadasa and Renfrew (1991)提出,并用于永磁同步电机的位置控制。因此,这个模型也适用于永磁同步电机的调速控制。
图3 基于HC的永磁同步电机调速控制原理框图
对于SMC,状态方程可以写为
其中,为转速差,为电机转速的导数。
为给定转速,为负载转矩。(19)-(22)式写成矩阵形式,为
在滑模控制中,滑动面的增益与斜率可由式(23)得到,滑动面函数及其导数为
其中,为滑动面函数,为滑动面函数的时间导数,是滑动面函数的斜率。
其中是控制电流,和式控制器增益。切换面的滑动模式要求值在0附近,这样,表达式为
因此,、和的表达式必须在的条件下才能成立。对于,在任一种情况下都是正值。因此,括号内的表达式一定小于零。因此有
的值可以是正的,也可以是负的。所以,括号内的表达式必须一起处理。因此有
其中,和分别是的上限和下限。和的表达式为
对于,有
其中,、、用作永磁同步电机调速控制的仿真实验参数。
3.2 模糊神经网络控制器的设计
图3显示了基于NFC的永磁同步电机调速控制的原理框图。NFC由模式集合、反复传播离线学习算法和神经网络组成,模糊神经网络通过离线学习算法运作,离线学习通过对电机动态信号的分析实现了一个模式集,该模式集是一个由、和组成的查询表,是模式集中模式的数目()。查询表应用于离线学习。NFC有两个输入,即转速差和转速差的导数,输出是控制电流的变化量。NFC的四层神经网络如图4所示,I、II、III、IV分别为网络的输入、隶属函数、模糊规则库以及网络的输出。
3.2.1 前馈算法
层I:在这一层中的节点的输入和输出可以表示为
其中,和为输入,和为输入层的输出。在这一层中,权重是统一和固定的。
层II:在这一层,每个节点执行一个模糊集,并且隶属函数采用高斯函数的形式,即
其中,、和、分别是高斯函数的平均值和标准偏差,在这一层中有个节点。
层III:这一层表示在FLC中应用的规则库,在这一层中,一个积算子表示一个节点的规则,即
其中,权重层和规则库层之间的链接权重是统一的。
层IV:这一层包括在FLC中的推论和模糊化,模糊化采用中心面积法,即
其中,为FLC中的输出隶属函数的中值,为规则层的输出,和分别为中心面积法中函数的分子和分母。在NFC中,学习算法的目的是调整、、、和的权重。在学习算法中采用可检测的梯度下降法,并运用离线法对NFC进行测试。为了描述反向传播学习算法,将误差准则定义为
其中,表示所有模式()中的最大数。对于每个模式,误差值可以表示为
其中,为期望输出,为实际输出。此外,和控制电流的变化量是相等的。
图4 模糊神经网络原理图
3.2.2 反向传播学习算法
层IV:层IV的输入误差表达式为
的变化量为
运用式(41)的值,得
其中,为的学习比率。
层III:在这一层中,从层IV中得到的误差为
层II:从层III中得到的误差为
此外,在这一层中,、、和的变化量为
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147625],资料为PDF文档或Word文档,PDF文档可免费转换为Word

