俯仰角控制变速风力涡轮机
摘要:在风速超过额定转速及各种控制变量时,俯仰角控制是调节风机气动力矩的最常用手段作为风速,发电机转速和发电机功率。作为常规的沥青控制通常使用的是,该系统的数学模型应该是众所周知的。模糊逻辑的角度控制采用本文开发的,它不需要知道系统的平均风速是用于补偿非线性灵敏度。模糊逻辑控制策略有可能当系统包含强非线性,如风湍流强烈,或控制目标,包括疲劳载荷。模糊逻辑控制器的设计与传统的俯仰角控制策略与各控制变量进行比较。仿真结果表明,模糊逻辑控制器可以实现更好的控制执行性能比传统的俯仰角控制策略,即降低疲劳载荷,降低峰值功率和扭矩峰值低。
关键词-叶片气动,疲劳载荷,模糊逻辑控制,俯仰角,风力涡轮机.
I介绍
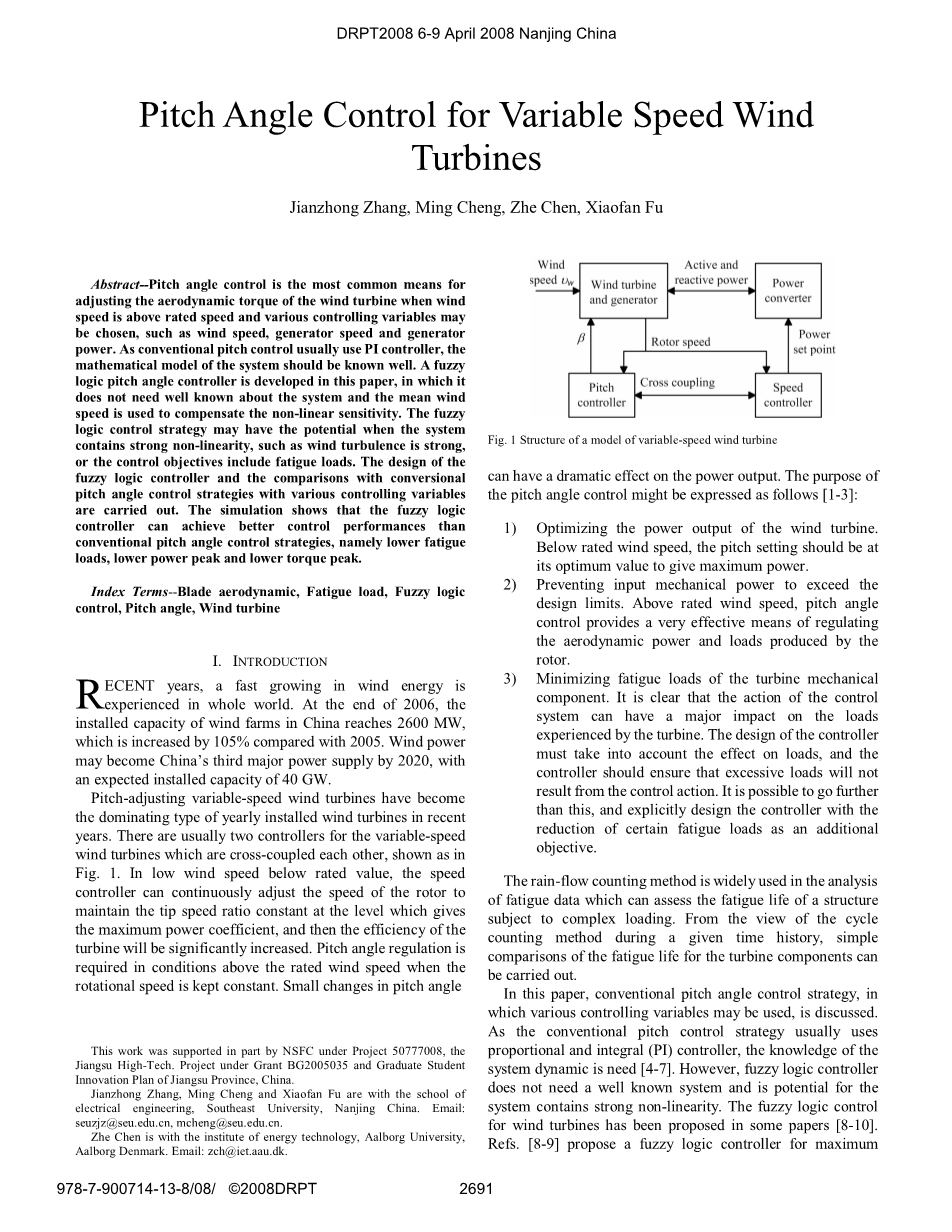
近年来,在世界各地的风力发电的快速增长是有经验的。2006年底,中国风电场装机容量达到2600兆瓦,比2005年提高了105%。风力发电可以通过2020成为中国第三大电源,与预期的40千瓦的装机容量。变桨距变速风力发电机组已成为年度的主要类型最近几年安装的风力涡轮机。通常有两种变速风力涡轮机控制器交叉相互耦合,如图1所示。在低风速下额定值,速度控制器可以连续地调整转子的转速,以保持在水平,给出的最大功率系数的前端的速度比常数,然后效率他涡轮机将显着增加。在额定风速时,在额定风速条件下,所需的俯仰角调节需要保持恒定。俯仰角的微小变化对输出功率有显著的影响。俯仰角控制的目的可以表示如下
- 优化风电机组的功率输出。在额定风速以下,其最佳值应为其最佳值。
- 防止输入机械功率超过设计极限。在额定风速以上,俯仰角控制提供了一个非常有效的手段,调节空气动力和负载产生的转子。
- 最大限度地减少涡轮机械部件的疲劳载荷。很明显,控制系统的作用,可以产生重大影响的负荷所经历的涡轮机。设计控制器的控制器必须考虑到负载的影响,控制器应确保过多的负荷不会导致控制作用。这是可能的,比这进一步,并明确设计的控制器与减少某些疲劳载荷作为一个额外的目标。
雨流计数法是一种广泛应用于疲劳数据分析的方法,它可以对复杂载荷下的结构疲劳寿命进行评估。从循环计数法中的观点在给定的时间历史,简单的比较,可进行涡轮机组件的疲劳寿命。在本文中,传统的俯仰角控制策略,在不同的控制变量可以使用,进行了讨论。与传统的变桨距控制策略通常采用比例积分(PI)控制器,系统的动态的知识是需要[4-7]。然而,模糊逻辑控制器不需要一个众所周知的系统,是潜在的系统包含强大的非线性。风机的模糊控制已在一些文献[8-10]提出。重新FS。[8-9]提出一个模糊逻辑控制器的最大功率点跟踪(MPPT)控制和参考文献[ 10 ]提出了一种基于模糊逻辑桨距角控制器的电力系统稳定。
本文以前面内容提到的三种用途为基础,设计、分析了一种模糊逻辑螺旋角控制器。并且用不同螺旋角控制策略进行仿真和比较,最后在文末给出了实验结果。
- 风力发电机组建模
- 风力发电机组的功率捕获
风中含有的能量和风速的立方成正比,可以用以下公式表示:
(1)
这里是空气密度,是叶片扫过的面积是风速,一个风力发电机组因为Betz限制的原因只能从风中获得一部分能量(最多是全部能量的59%)。用来描述发电机组的功率系数,它与叶片桨距角和叶尖速比有关。因此风力发电机组从风中获得的能量为:
(2)
其中是发电机组的功率系数,是叶片桨距角,是叶尖速比。叶尖速比定义为叶片尖端的速度和风速的比值。
(3)
其中为涡轮机转子的速度,是风力涡轮机叶片的半径。
图2 功率系数特性
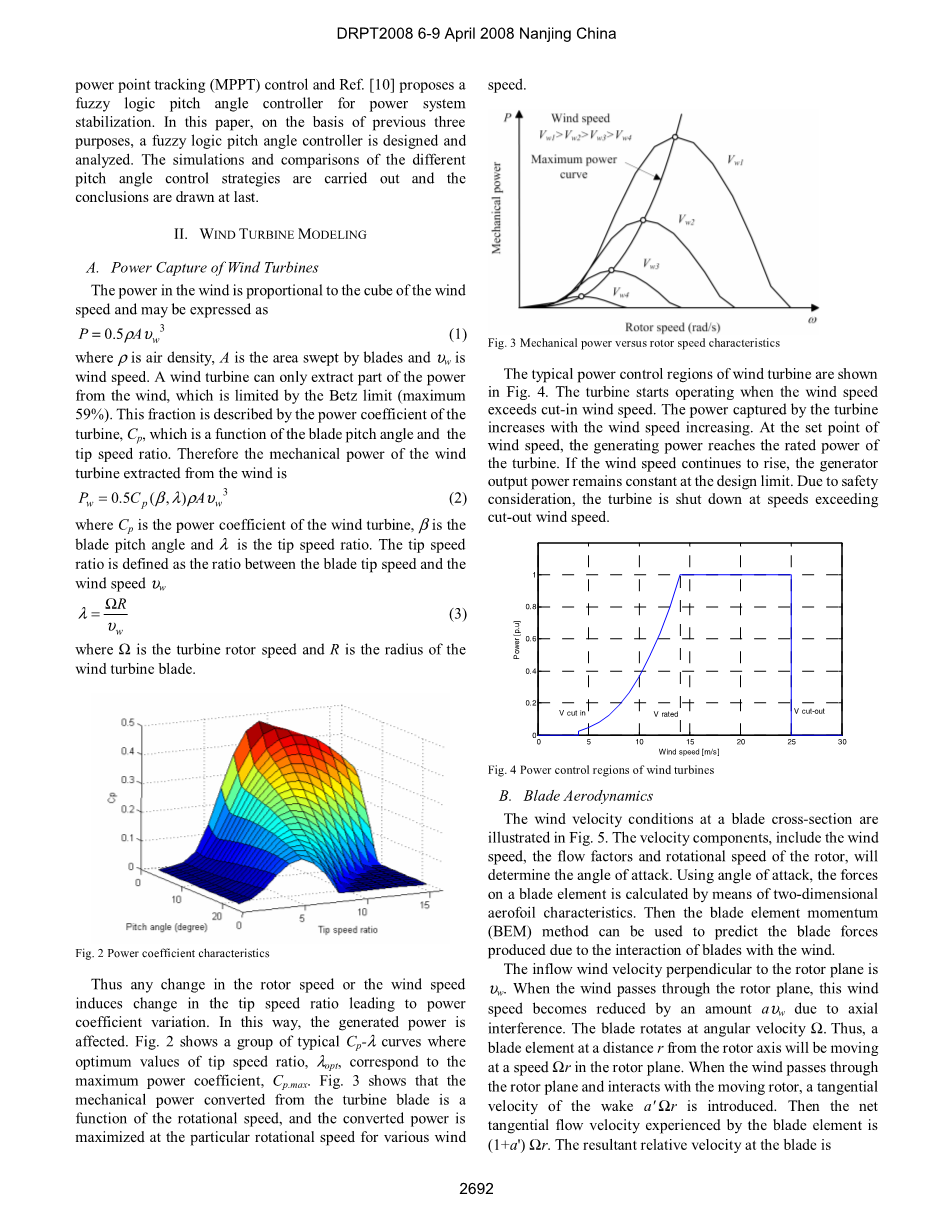
因此,风速或者是转子转速的任何变化会引起叶尖速比的变化,从而导致功率系数的变化。图2表示一组在叶尖速比最优(功率系数最大时对应的叶尖速比)的情况下的的曲线。图三表示从涡轮机叶片转化的机械能量是角速度的函数,在不同风速的情况下,角速度存在一个值使转化效率最大。
图三 机械能量与角速度的关系
图四表示风力发电机组的典型功率控制区域,当风速超过切入风速,涡轮机开始工作。由涡轮机捕获的功率随着风速的增加而增加。在风速达到设定值时,涡轮产生的功率达到额定功率。如果风速继续上升,发电机输出功率保持设计值不变。出于安全考虑,涡轮机在速度超过切出风速时即停止工作。
图四 风力发电机组功率控制区域
- 叶片空气动力学
图5表示在一个叶片横截面的风速状态。速度分量,包括风力速度,窜流系数和转子的速度决定冲角的大小。使用冲角,叶片部分受到的力可由二维的机翼属性来计算。然后,动量-叶素理论(BEM)可用于预测与风叶片相互作用而产生的力。垂直于转子平面的流入风速为。当风通过转子平面,风速会因轴向干扰减少到。叶片角速度为。因此,在旋转平面,扇叶上一个离旋转轴距离为的点的速度为。当风经过转子平面然后与移动转子相互作用,可以推出切线速度为。那么通过扇叶部分的净切向流速度为。叶片的相对速度为:
(4)
这里为叶片的相对速度为,和是窜流系数,是叶片上的点到旋转轴的距离。由空气动力学可知,所得的相对速度在叶片上产生了力,因此这个升力是:
(5)
拉力为:
(6)
这里是升力系数,是拉力系数,是扇叶弦长。
图五表示,在螺距调整变速风力涡轮机中,当桨距角增大时,冲角减小。同时升力减小,这会减少风力发电机组的机械转化效率。根据桨距角控制理论,低于额定风速的初始角为。当入风的速率在0范围内,桨距角的最优值可以用动量-叶素理论(BEM)确定。就像图四所示,风力发电机组的功率随着风速的增加而增加。需要考虑在强风情况下,风力发电机组的过载和损坏概率。这个可以通过调整进入风扇发电机组的风量来实现。在这个区域功率会保持在它的额定值。图六显示了用BEM模型在1.5MW的风力发电机组中,桨距角与入风速度的函数曲线。
图六 叶片上的点在扇叶横截面的速度和受力
- 桨距角控制的传统方法
如图二所示,在强风下,调整叶片的桨距角是一个很有效的方法来调节限制发电机组。螺旋舵机可以用液压或电力系统把扇叶调整到合适的位置,叶片节距调节速度约为旋转速度的5-10%[10]。为了防止常规操作时的发电机组的过载情况,这里选择的速度为8%。
传统的叶片俯仰角控制策略如图7所示。俯仰角的参考,是由输入值的控制,这可能是如下:
- 风速,如图7所示(一)。理想情况下,俯仰角的参考,可以得到从俯仰角与风速的曲线,如图6所示。这种控制策略很简单风速直接测量。然而,这是不是一个适当的程序,因为它是不可能测量的风速精确。
- 不可能精确地测量风速,发电机转子转速,如图7所示。控制转子的速度相比,其参考。的错误信号,然后发送到等皮控制器,并产生的参考值的俯仰角,
- 发电机的功率,如图7所示(c)。发电机功率的误差信号被发送给一个控制器。PI控制器生产基准俯仰角尾参考TH的非线性变化大风速,如图6所示的俯仰角与风速,意味着一个非线性控制的必要性。当风速接近额定值时,气动不敏感扭矩俯仰角很小。因此,需要一个更大的控制器增益比在更高的风速,在那里一个小的变化,在俯仰可以有一个大的转矩的影响。频繁的部件UE的敏感性几乎呈线性俯仰角的变化,因此可以通过改变控制器的整体增益线性反比的俯仰角补偿。这样的修改增益与工作点被称为增益调度[ 5 ]。
在系统动态不强时,传统的俯仰角控制策略与增益调度性能良好。然而,在不同的空气动力扭矩对俯仰角的敏感性各不相同在增益调度中作为线性变化的处理方式,由于其对涡轮动力学的影响,强烈地与俯仰控制器耦合,可能需要修改增益进一步安排,以确保在所有风中良好的性能。
图7俯仰角控制策略。(一)风速;(二)发电机转子速度;(三)发电机功率。
模糊逻辑控制
基于规则的模糊逻辑控制器是有用的当系统动力学是众所周知的或当他们包含显着的非线性,如联合国固定风有大动荡。TH先进的控制策略是更利于减少疲劳载荷的控制动机之一。模糊逻辑控制器应用推理,类似于人类如何做出决策,从而控制器规则包含系统的专家知识。模糊逻辑控制的大优点应用到风力涡轮机,涡轮机系统既不需要准确地描述教育也不需要是线性的。图8所示模糊逻辑的设计过程。输入和输出隶属函数如图9所示。三角对称的隶属函数适用于输入和输出,使更多的敏感性,尤其是变量趋于零价值。根据系统参数可调整变化宽度。
图8模糊逻辑控制策略
如图8所示,该模糊控制器是基于其参考价值∆P功率偏差、采样时间delta;在变化(∆P)如下:
喜欢是在额定功率的系统和PG是测量发电机功率。平均风速upsilon;WM,作为第三个输入变量,来补偿非线性灵敏度有用俯仰角的风速。表一列出了控制规则的输入和输出变量。在模糊系统、模糊集被认为是九大变量:负(NL),负中大(NML),负中(nm),负小(NS)、零(泽),正小(PS),正向介质(PM),阳性中大(PML),阳性大(PL)。在较低的平均风速,控制器的低敏感由(i)确定输入,(ii)建立规则和(iii)一个转换规则的模糊导致输出信号的设计方法,自己去模糊化。本文提出了一种新的其中一个控制器的动机是降低疲劳载荷的变桨距控制的模糊逻辑控制器。模糊逻辑控制系统茎俯仰角控制意味着一个大的反应的俯仰角控制的变种将需要比在较高的平均风速。这是在表一。
一个直接的和容易理解的控制逻辑可以得到如下的考虑(不考虑风速):
1)如果∆P和delta;(∆P)为负大,输出功率角太大,其幅度越来越大,因此目前的俯仰角必须快速下降。
2)如果∆P负大delta;(∆P)是阳性大,输出功率大于它的参考,但由于其振幅减小,俯仰角变化要小。
- 如果∆P小螺距角的变化必须平滑,因为过大的变化激发振荡模式。
五、仿真结果与讨论
利用Matlab/Simulink工具测试控制策略和评估系统的性能,模拟了风力涡轮机的俯仰角控制系统。表二显示的特点风机系统。
风模型获得的风力涡轮机的功率控制仿真必不可少。对于风场模型包括以及塔影效应的湍流。图10说明了该轮毂高度的风速变化。它有一个平均值为11米/秒的轮毂高度和紊流强度的30%。
图10风速平均11米/秒。
图11显示的结果传统的俯仰角控制策略在风速作为控制变量。它表明,如果理想的风速,转矩脉动ES在高风速,如图11所示,从12-40秒,是非常小的。这意味着很小的风力涡轮机部件的疲劳载荷和疲劳寿命长的原因是根据他雨流计数法。相对而言,一个第二平均风速作为控制变量和偏离理想的性能表现。
图11俯仰角控制策略:风速。
图12显示的结果传统的俯仰角控制策略,发电机功率作为控制变量。比较有无增益调度显示T他原已快速俯仰角对风速的变化,这有利于最小功率和转矩脉动。不同策略的比较如图13所示。结果表明,提出了模糊逻辑控制策略具有最低的转矩脉动,在高风速,这意味着减少疲劳载荷对涡轮部件。一个狭隘的低功率峰值和低扭矩峰值也得到了模糊逻辑控制器。然而,在速度不利用模糊逻辑控制器减少。该策略采用转速为控制变量不超速而扭矩和功率波动最为严重。从平滑的俯仰角的动作来看,模糊控制优于其他两种控制策略,除了转速控制策略。
图12:发电机组的桨距角控制策略
图13比较的俯仰角控制策略。
结论
俯仰角控制是控制风力涡轮机转子产生的气动功率最常用的手段。俯仰角控制也有影响的气动载荷可由控制器控制,实现较低的峰值扭矩以及较低的疲劳载荷。
传统的俯仰角控制策略采用不同的控制变量可以实现。然而,模糊逻辑桨距角控制策略不需要了解关于风力发电机动态麦克当风机有很强的非线性,这更有利于也。仿真结果表明,模糊逻辑控制器具有最低的疲劳载荷和扭矩峰值降低功率峰值。模糊逻辑控制器的俯仰角比功率或风速控制变传统的俯仰角控制活动减少,导致更少的动态扭矩。
七。确认
张建忠感谢中国奖学金委员会提供为期一年的联合监督博士奖学金在奥尔堡大学能源技术研究所,丹麦。
八。文献[ 1 ] T.伯顿,D.夏普,詹金斯,E. bossanyi,风能手册,约翰威利父子公司,奇切斯特,英国,2001。
【2】DNV / RIS繪,风力涡轮机的设计指南,第二版,JYDSK centraltrykkeri,丹麦,2002。
[ 3 ]美国suryanarayanan,A. Dixit,大型风力发电机组的控制:审查提出多元的设计方法、过程。美国控制会议2005,波特兰,美国,686-690页。
[ 4 ] v.艾哈迈托夫,双馈感应发电机的变速风力发电机组的一部分我:建模动态仿真工具,风工程,26卷,第2号,2002,第85
剩余内容已隐藏,支付完成后下载完整资料
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148110],资料为PDF文档或Word文档,PDF文档可免费转换为Word

