2010 届电气与控制工程国际会议
基于蓝牙技术的 CAN 总线网络设计
|
肖宏仁 |
陈华赋 |
||||
|
自动化与电子工程系 |
自动化与电子工程系 |
||||
|
四川理工大学 |
四川理工大学 |
||||
|
自贡,中国 |
自贡,中国 |
||||
|
Rx88@163.com |
Fch888@sina.com |
||||
王天文
自动化与电子工程系
四川理工大学
自贡,中国
Wangtianwensos@163.com
摘要-蓝牙技术和蓝牙技术之间的集成现场总线是无线通讯在工业现场运用中的重要项目。通过对蓝牙技术和现场总线网络拓扑结构的分析,提出了基于蓝牙无线传感器网络和 CAN 总线的互连完成系统硬件设计和软件开发,包括三个部分:CAN 智能掌握器和基于 MCU8051 的 CAN-蓝牙智能掌握节点和基于 mcu2051 的蓝牙传感器节点。主要解决了蓝牙技术协议和 CAN 总线协议,实现了两者之间的转换。实验表明,该系统运行可靠、稳定,CAN-蓝牙节点能够将蓝牙无线传感器节点的数据实时正确传输到上位机经由过程 CAN 总线智能掌握器。
关键词蓝牙技术; CAN 总线; 网络拓扑结构; 通信协议; CAN-蓝牙节点; 传感器节点
- 我俯冲
近年来,蓝牙技术的应用研究在工业领域得到了极大的关注,因为它是解决短距离无线通信和替换短距离电缆的好方法。蓝牙模块的主要功能是低功耗、低成本、低复杂度和鲁棒性。蓝牙模块在 2.4 MHz 的无牌 ISM (工业,科学,医疗) 频段中运行,避免了来自工业环境的推论。蓝牙无线电采用快速确认和跳频方案使链路具有鲁棒性,尤其是传感器网络在强 EMS 环境下具有明显的抗推理能力。另一方面,CAN (控制器局域网) 总线是世界上应用最广泛的现场总线之一。国际标准 ISO11898 将 CAN 总线定义为全数字现场总线警用巡检设备连接总线,可以有效地支持分布式控制和实时系统的串行通信。CAN 总线已广泛应用于传感器、数据采集、工业控制
舒翔贾
自动化与电子工程系
四川理工大学
自贡,中国
Jiashuxianglc@163.com
仪器设备具有高可靠性、现实性和灵活性。如何将 CAN 总线有线技术与蓝牙无线技术相结合是当前研究的热点。本文给出了一种基于蓝牙技术的 CAN 总线网络的设计方案,包括 CAN 总线蓝牙智能节点、蓝牙传感器网络以及整个网络架构。
- S系统和ETWORKT眼镜学A甲壳虫养殖
一个网络拓扑结构,如图 1 所示,与 CAN 总线和蓝牙技术的融合构建。蓝牙技术提供点对点或点对多连接。主节点可以不超过七个从属节点 (同时处于活动状态),形成一个星型网络,主从结构称为 picnet。如果 picnet 中的主节点与 CAN 总线网络节点融合,就可以得到所谓的 can-蓝牙智能节点。结果,一个 picnet 和另一个可以放在 can 总线,使这两种技术,即。无线微区网络与现场总线进行集成,并进一步与以太网连接,最后提出了工业传感器无线微区网络、现场总线和工业以太网的三层拓扑结构。在底部的 picnet 也可以产生这样的-calLed 散射网络通过从节点进一步扩展传感器网络。考虑到现场传感器的分布特性、极限电源容量、极限存储器容量、极限计算能力和极限通信能力,传感器节点由单元、传感器元件、测量电路、蓝牙模块、微控制器及其软系统等。 CAN-蓝牙智能节点由 CAN 总线控制器组成,CAN 接口驱动、蓝牙模块、微掌握器及其软体系等。
这项工作得到了人工科学研究基金的支持
四川省情报重点大学实验室 (2007R011).
|
978 0-7695 4031 3/10 $26.00copy;2010 ie |
560 |
|
DOI 10.1109/iCECE.2010.144 |
通信接口可以直接连接蓝牙模块,无需电气电平转换。我们用 10 位,55 mW,3v ADC10040 作为 A/D 变压器。从属节点不能与彼此通信,只能与主节点进行无线连接。
图 1. CAN 总线-蓝牙网络拓扑
- S系统和ETWORKT眼镜学A甲壳虫养殖
如图 1 所示,通过 CAN 总线和蓝牙技术的融合,构建了网络拓扑结构。蓝牙技术提供点对点或点对多连接。主节点可以不超过七个从属节点 (同时处于活动状态),形成一个星型网络,主从结构称为 picnet。如果 picnet 中的主节点与 CAN 总线网络节点融合,就可以得到所谓的 can-蓝牙智能节点。因此,一个 picnet 和另一个可以放在 can 总线,使这两种技术,即无线微区网络与现场总线进行集成,并进一步与以太网连接,最后提出了工业传感器无线微区网络、现场总线和工业以太网的三层拓扑结构。在底部的 picnet 也可以产生 sO-称为散射网络,通过从节点进一步扩展传感器网络。考虑到现场传感器的分布特性、极限电源容量、极限存储器容量、极限计算能力和极限通信能力,传感器节点由单元、传感器元件、测量电路、蓝牙模块、微控制器及其软系统等。 CAN-蓝牙智能节点由 CAN 总线控制器组成,CAN 接口驱动蓝牙模块、单片机及其软体系等。
IV. 和ODEHARDWAREDESIGN
如上所述,如图 1 所示,整个系统包括上位机、 CAN 总线控制器、 CAN-蓝牙智能节点和蓝牙传感器节点。每个 CAN-蓝牙智能节点都是一个主设备 (蓝牙上的意思),它形成了一个一对多的主从网络架构,基于蓝牙技术的七个传感器。
A. 传感器从属节点
图 2 显示了 PT100 温度传感器从节点的典型结构。由于散乱场分布和无线发送和链路的数字,功率问题必须引起重视。由于传感器仅采集和发送数据的功能相对简单,设计了一种采用 AT89C2051 超低功耗单片机的异步功能节点。
Figure2。传感器节点
Figure3。CAN-蓝牙智能节点
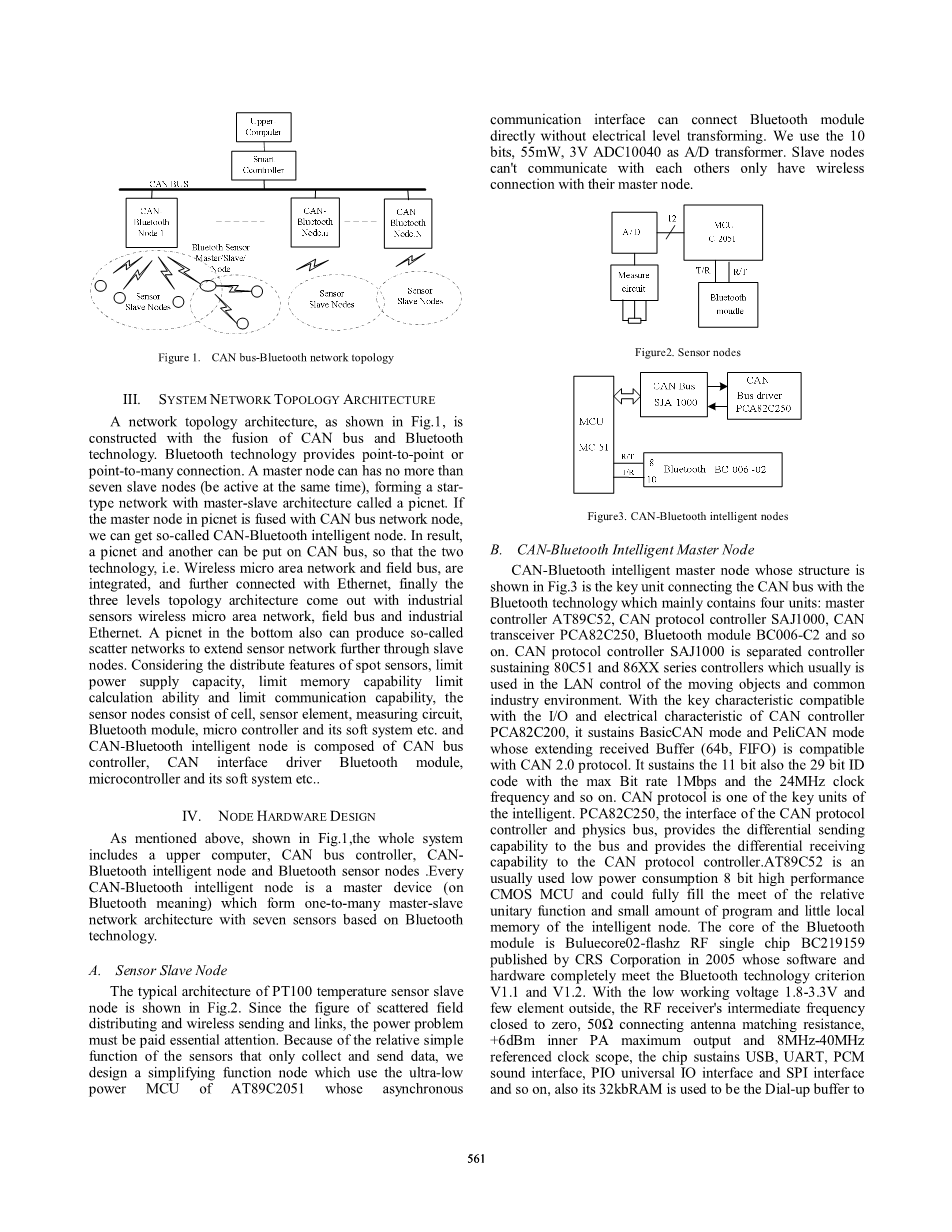
B. CAN-蓝牙智能主节点
CAN-蓝牙智能主节点,其结构如图 3 所示,是连接 CAN 总线与蓝牙技术的关键单元,主要包含四个单元: 主控制器 AT89C52,CAN 协议控制器 SAJ1000, CAN 收发器 PCA82C250 、蓝牙模块 BC006-C2 等。CAN 协议控制器 SAJ1000 是支持 80C51 和 86XX 系列控制器的分离控制器,通常用于移动对象和常见工业环境的局域网控制。与 CAN 控制器 PCA82C200 的 I/O 和电气特性兼容的关键特性,它支持 BasicCAN 模式和扩展接收缓冲区 (64b,FIFO) 与 CAN 2.0 协议兼容。它支持 11 位也 29 位 ID 代码与最大比特率 1 Mbps 和 24 MHz 时钟频率和等等。CAN 协定是智能化的症结单位之一。PCA82C250,CAN 协议控制器和物理总线的接口,向总线提供差分发送功能,并向 CAN 协议控制器提供差分接收功能。 AT89C52 是一种常用的低功耗 8 位高性能 CMOS 单片机,能够充分满足智能节点相对单一的功能和少量的程序和少量的局部存储器。蓝牙模块的核心是 Buluecore02-flashz CRS 公司于 2005年发布的射频单片机 BC219159,其软硬件完全符合蓝牙技术规范 V1.1 和 v1.2。低工作电压 1.8-3.3 V 和少数元件外,射频接收机的中频接近零,50Omega;连接天线匹配电阻,6dBm 内部 PA 最大输出和 8mhz-40mhz 参考时钟范围,芯片支持 USB,UART,PCM 声音接口, PIO 通用 IO 接口和 SPI 接口等,也将其 32 kbRAM 用作拨号缓冲
561
保存蓝牙堆栈的声音数据和通用内存。否则,它拥有 8 Mb 的闪存,支持点对点和点对点多网络拓扑结构,可以形成 picnet 和散射网。
|
CANBUS |
|
Vcc |
Figure4。蓝牙 CAN 主节点硬件
C. CAN 总线智能控制器
针对 CAN 总线系统,CAN 智能控制器作为主节点,CAN-蓝牙智能节点作为整个 CAN-蓝牙网络中的从属节点。CAN 总线在多主模式下工作,主从无差异。CAN 智能控制器负责 CAN 总线与上位机通信,它可以通过 RS232 与上位机进行数据交换,同时控制现场蓝牙传感器节点 (断连接等) 从上位机。上位机提供友好的人机界面、 trendencyl 、数据保存、对整个系统的监控、节点协调和上传采集信息等功能。我们选择微控制器 AT89C52 作为 CAN 总线控制器,SAJ1000 作为 CAN 协议控制Ler,PCA82C250 as 可以接口驱动器和 prolate 数据存储器等。
- PROTOCOLDESIGN
系统软件的设计流程图如图 5 所示。蓝牙主从节点通过异步通信接口 UART 与微控制器通信,该接口通过板载串口初始化并向模块发送指令 (TXD/RXD)。并接收从节点获得的数据构成掌握节点。蓝牙模块的第八个引脚充当 MCU 串行输入 RXD 连接到发射端,同时第十个引脚作为 MCU 串行输出 TXD 连接到接收端。在主节点和从节点的互连之后, 当从节点收集到的数据发送到主节点时,用 SAJ1000 将数据打包为通用 CAN 总线帧,并将其发送到 CAN 总线。获取报告后,CAN 总线读取蓝牙节点数据并将其传输到上位机根据通用帧 (CAN 总线控制器负责)。
上电
复位 MCU
看狗
启动
启动串行端口
启动 SJA1000
外部中断
启动
喂狗
命令
|
串行端口 Dater |
和 |
|
发送完成? |
接收可以
总线信息
Y
接收信息
感应到串行端口
和
发送 CAN 数据
完成?
Y
接收串行
端口信息
Y
将数据发送到
可以
图 5系统软件设计流程图:
蓝牙智能掌握节点在 CAN 总线上对本地节点设备 (切割链路、设备互连等) 进行操作时,根据顺序获取 CAN 总线。协议设计主要包括两部分: CAN 总线-蓝牙通信协议转换的制作和 RS232 串口数据格式的定义 (CAN-RS232 连接到上位机)。
A. 蓝牙 Pr 简介OtOcol Stackr
蓝牙核心系统包含射频无线电收发器、基带和协议栈。蓝牙协议栈包括射频层,基带,LMP,L2CAP 和 SDP 由分配协议的 SIG。当蓝牙设备传输数据时,基带部分使高层协议信道编码的数据通过射频下行传输。当蓝牙设备接收数据时,RF 将解调和修改空中数据,并向上传输到基带,然后解码并将其发送到高层。与 LMP 一起,基地
562
频段确保每台蓝牙设备之间的射频构成物理连接。基带数据子群提供两个物理样式: SOC (面向同步连接) 和 ACL (异步无连接)。ACL 采用 7723.2 Kbps 下游和 57.6 Kbps 上游不对称或 433.9 Kbps 对称的数据 rata 传输数据 (子群)。主站和所有启用的从站之间只有一个 ACL 连接,只有寻址的从设备可以回答。LMP 控制和安排两个蓝牙设备之间的所有关系链路操作,包括建立和控制逻辑传输和逻辑链路,同时控制物理层。通过该协议,发送接收链路管理器识别和过滤信号,而不是发送给更高的 rIse 协议。L2CAP 是基带的上层协议, 它将基带的数据转换为适合高层使用的数据模式

英语原文共 5 页
资料编号:[4949]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

