
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
仰角和方位角控制的自动定位双轴太阳跟踪系统
摘要:本文提出了一种自动定位开环双轴太阳跟踪系统的研究。这个太阳能跟踪器的设计使用标准的圆柱空心铝和polyuthrene制作(体育)。太阳能跟踪器的控制系统是由微控制器单元(MCU)和包括编码器和全球定位系统(GPS)的辅助设备。太阳路径轨迹算法利用天文方程和GPS信息嵌入在系统中。将电源双轴太阳跟踪系统的发电性能与固定倾斜光伏(PV)系统进行了比较。发现太阳能跟踪器是能够自动定位精度为0.5的太阳路径轨迹算法。嵌入式比例积分微分(PID)定位系统提高了仰角和方位角的跟踪范围。据透露,理想的太阳能跟踪器是在一个明朗和阴天条件分别能够产生26.9%和12.8%高功率比的固定倾斜光伏系统。总的来说,这开环双轴太阳能跟踪器可以自动部署在地球上的任何地方的最小配置,适用于移动太阳跟踪系统。
1、介绍:太阳能跟踪是一种方法,以保持太阳能集热器,无论是光伏(PV)或光热,在白天垂直于太阳辐射的最佳位置增加收集的能量,并在任何时候接受最大的太阳辐射。太阳能跟踪系统可以是被动的或活动的类型。一种被动跟踪系统利用材料热膨胀概念。通常,一个含氯氟烃或形状记忆的合金放在太阳两侧的面板。当面板与太阳垂直时,两侧处于平衡状态。一旦太阳移动,一面加热导致一方扩大,另一方缩小,造成太阳能电池板旋转。虽然这种方法不太复杂,但价格昂贵,精度低,主要依靠温差。
通过主动调整来提高太阳跟踪系统精度。该系统倾斜的太阳能电池板根据太阳运动是通过电机或液压执行器由一组控制器控制。该系统可以分类打开和关闭循环。开环,基于微处理器系统使用数学公式来预测太阳的运动,不需要传感器来感知阳光[ 2 ]。这个系统要求当前状态(基于位置的太阳方位角和高度角)和算法集需要反馈(感测阳光的传感器)。这是与闭环系统相比低成本的一个简单的方法。一般情况下,为了跟踪太阳,太阳辐射的几何模型被嵌入在系统中。在开环的问题中系统的纠错能力和系统可能不补偿外部干扰(安装过程中的偏差)系统中的操作。
在基于可编程逻辑控制器开环跟踪系统的性能进行了大量的研究后(PLC)[ 4E9 ]。根据在文献[1]的研究之一[ 4 ],一二轴太阳跟踪器的开发和进行跟踪太阳的最长路径,有人发现晴朗天气系统可实现42.6%高能源比固定光伏系统[ 4 ]。基于两轴的其他研究,改进的太阳能跟踪器也表现出相同的能量百分比,最高的收集可能是41.34%,高于固定光伏系统[5,6]。即使单轴系统可以收集22%高能量比固定光伏系统[ 7 ]。电流,电压和电阻变化的功率也被研究发现,所记录的功率增益两轴为43.87%,东西为37.53%,垂直为34.43%,南北跟踪15.69%,电机和控制总量系统消耗少于总收集能量的2% [ 8 ]。一个基于神经网络的开环跟踪系统模的糊系统也被设计出来,以优化能源收集。
其他一些研究是利用微指令的开环跟踪系统的控制器单元(MCU)[ 10e12 ]。有一个用单片机根据计算机接收到的信息协调光伏电池板的跟踪系统的研究,该系统要求放置在正确的初始位置并根据其配置设置地理位置[ 10 ]。还有一项研究,适用于非移动MCU中的比例积分微分(PID)太阳能跟踪系统,以控制光伏的位置面板[ 3 ]。参考文献[ 11 ]的另一项研究使用了基于单片机的一二轴太阳跟踪器。然而,太阳跟踪器系统确定基于太阳位置算法的太阳路径跟踪的系统提供了更好的结果,特别是在阴天期间[ 11 ],在长期的闭环跟踪系统中。一个充分基于单片机操作的双轴太阳能跟踪系统[ 12 ]。所有的传感器包括在单片机里面嵌入全球定位系统(GPS)模块,它基于此系发现的能量收集可以比固定光伏系统高出40.7%。然而,该系统与其他系统有相同的问题,跟踪系统需要手工对齐为了向TrueNorth增加发电。
闭环跟踪系统是利用光电传感器的信息估计太阳实际位置的。这个光电传感器用于驱动电机和执行器。跟踪器是复杂的,非常准确的[ 1,13 ]。一个研究参考文献[ 14 ]使用PLC的单轴太阳跟踪系统是通过光敏电阻捕获的太阳辐射强度。该系统表明,它从上午6点到10点和下午3时至下午5时在日常电源输出可以捕获能量最多高于固定光伏系统40%,太阳跟踪器系统可以获得20%的输出比固定光伏系统[ 14 ]。在参考文献[ 15 ]的光伏/热联合低浓度系统,以提高太阳能转换效率。菲涅耳组合系统集中器使用的线性致动器和簧片传感器使得该系统的效率可以高达60%;由于其菲涅耳聚光器和冷却机构,可以提高系统整体性能[ 15 ]。开环与闭环太阳跟踪系统的比较研究也在参考[ 16 ]的基础上进行预定太阳路径轨迹和光敏电阻(LDR)传感器。它被发现打开和闭合循环跟踪类型的效率分别高于固定光伏系统25.96%和33%,闭环跟踪类型的效率高于开环跟踪类型7.04%,[ 16 ]。还有一些研究要实现单片机与LDR传感器,它被发现的地方双轴光伏跟踪系统获得的最大功率和效率的平均增益分别为25%、30%比固定式光伏系统[ 17e19 ]。双轴闭环跟踪系统还开发了在参考[ 20 ]不使用单片机和LDR。建议的系统使用两对光电二极管处理通过使用一对差分放大器。这种低成本的系统在冬季可以产生一个额外的18.3%至34 %的功率[ 20 ]
开环系统提供了一种跟踪太阳的简单方法但缺乏准确性,需要手动校准,以达到最大的发电量。另一方面,闭环系统提供长期的高精度跟踪比,但该系统是昂贵的,需要复杂的电路。考虑到成本和简单的操作,利用GPS信息和天文方程进行了系统优化。在这项开环双轴太阳跟踪器的设计和开发的研究中,太阳的路径是基于天文方程的算法来确定轨迹的,PID是用来优化太阳跟踪器控制系统,其次,通过比较对固定倾斜光伏发电系统和太阳能跟踪器的发电性能进行了分析。
- 方法论
2.1、太阳能跟踪系统
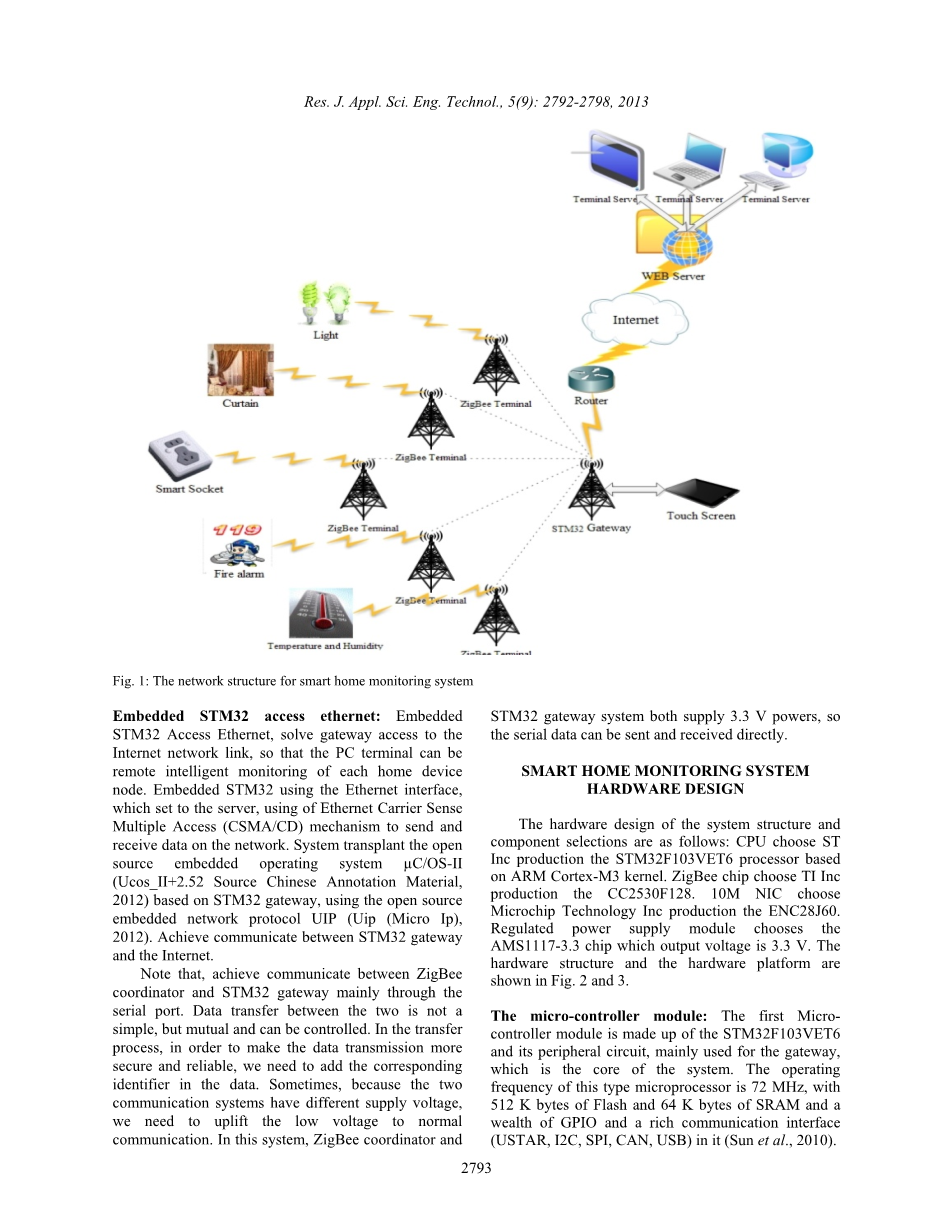
图1所示的太阳能跟踪系统由机械结构和电气硬件以及电子控制系统组成。机械结构包括光伏板和高度/方位角执行器,而电子控制系统由主/从微控制器,GPS /指南针/ RTC模块,高度/方位定位传感器和执行器组成。
2.2、机械结构与电气硬件
双轴太阳能跟踪机构的设计和制造如图2所示。跟踪系统采用2个执行器,光伏电池板根据太阳的位置旋转和移动。对于方位跟踪,直流电机用于光伏电池板
顺时针和逆时针方向与360全旋转。采用直线运动直流电机向上和向下倾斜光伏板进行高度跟踪,方位和高度跟踪角反馈,2位10位绝对编码器安装在方位和高度的旋转中心。
2.3、电子控制系统
光伏组件的方向控制通过由单片机、传感器组成的电子控制系统模块和电机驱动,如图3所示,电子控制器系统由主控制器控制,由2个从微控制器支持。
2.3.1、主控制器
微芯片的PIC18F4680作为太阳路径轨迹的执行系统算法、算法计算及数据库生成的主控制器。它也用于从GPS模块,ls200311590r-a和数字指南针传感器模块、霍尼韦尔hmc6352模块采集解码信息。GPS传感器模块被用来确定太阳跟踪多个轨道卫星在标准经纬坐标系统中精确定位的系统。GPS传感器模块每1秒通过串行UART通信协议连续发送一串字符给主控制器。这个字符串主要包含位置的经度信息,纬度、海拔高度和日期和时间和标准的美国国家海洋电子协会(NMEA)通信协议。这个数字罗盘传感器也被用来消除光伏偏移和失配降低光伏组件发电效率。数字罗盘传感器向太阳跟踪器提供航向反馈测量地球的磁场。
2.3.2、从控制器
两个Microchip PIC18F4431单片机作为从控制器和接口与电机驱动器和位置反馈传感器如图3所示。控制器用于控制光伏的方位角和辅助主控制器高度角位置独立。主控制器根据需要传送期望的角度设定点或指令生成Sun的路径数据库,从属控制器控制使用I2C通信从控制器协议方位而高度跟踪致动器的运动采用10位绝对编码器作为位置反馈的嵌入式PID定位算法。绝对编码器接口和两个从控制器直接通过10位数字并行端口连接。为了控制方位和高度感应负载在执行器的动作,一个全桥电机驱动器连接到每个从控制器通过标准的2位数字I/O端口和一个单一的PWM端口控制致动器的方向和速度。
2.4、太阳跟踪系统算法
太阳跟踪算法的开发,以确定太阳路径的特点,如以极高的精度为特定地点全年日出,日落和中午太阳的路径特点。图4显示了跟踪系统算法的细节。
2.4.1、太阳轨迹发生器
为了获得最大功率输出,计算太阳的方位和高度的位置首先执行天文方程。太阳的位置通过方程(1)和(2)分别被描述为方位角,G和高度。根据信息方程(1)及(5)太阳的位置取决于开始的天数,D从1月1日如方程(3),以及在方程中的天T的时间(4)。术语中特定位置的坐标纬度和经度empty;。
其中一个是高度角方位角,G,D是偏角,D是天的年数,L是经度,时间是格林尼治时间和LSTM当地标准时间子午线。
2.4.2、真北航向基准
系统方位角的航向基准是基于真北轴承系统。跟踪系统采用数字罗盘传感器,采用磁北轴承系统。为了确定真正的北,NG,系统的标题参考的方向,原始标题数据或磁北数据,Nm增加了位置偏角角,D作为方程(6)。一般来说,方程(6)是从磁偏角是来自国家地理数据中心(NGDC)生成一个数据库获得并嵌入在太阳跟踪系统中。
2.4.3、太阳正午位置
太阳中午的位置是通过逆转太阳的路径轨迹发生器算法确定。一般来说,太阳中午出现时,太阳的方位角位置正好是0。太阳中午的位置和时间是通过将日期和坐标信息代入方程(1)E(3)、(5)和(6)e((1))来确定而不是使用的时间,日期和坐标,以确定太阳的位置、海拔和方位角。
V是小时角,LST是当地的太阳时间,TC是时间校正因子,它是当地时间,EOT是以分钟为单位的方程,时间是格林尼治的平均小时数。
2.4.4.、跟踪方法
在初始化系统时,它通过嵌入式GPS模块的具体位置获得了重要的日期、时间和精确经纬度等信息。系统执行算法计算全年的太阳位置数据库列表,生成的数据库包括太阳的确切位置和由高度和方位角指定的时间和日期,然后跟踪器利用嵌入式指南针传感器自动对准跟踪系统相对于真实的方位基准。跟踪系统基于列表数据库信息自动对准朝向太阳的光伏模块。对于高度和方位角该算法允许跟踪保持光伏模块对太阳的一次差分瞄准。对于高空运动控制,电机启动面板从日出到中午在日落时把面板带到了原来的位置。在同一时间,方位运动控制旋转面板顺时针或逆时针旋转。在一天结束时,光伏模块返回到其起始位置,并准备次日追踪。晚上,电子系统处于一个睡眠模式,以减少功耗。
2.4.5、光伏模块定位控制器
为了最大限度地减少执行器运动能量增益,一对基于PID控制器嵌入在太阳跟踪系统中,提高了定位精度同时为控制方位角和高度提供了一个较短的稳定时间。独立跟踪运动的方位角和高度角设置点,SPG和SPa的基础上产生的阶跃响应太阳路径轨迹数据库。系统的过程变量PVg和PVA是电流角测量的反馈信号,这是从绝对编码器的跟踪得来。这个测量的电流角与方位角和高度角的角度设定点称为根据方程计算的误差(EG和EA)。如方程(11)(12),角差被用来控制方向方位和进行高度跟踪执行器的下一个定位过程。
为了确保系统能够以最小的位移在0-365°之间同方向或反向转动,而修改方程(13)的方位角误差Eg.
两个驱动器的速度大小和方向由一个独立的PID控制器控制方程(14)和方位角和高度跟踪运动方程(15)控制。两个PID控制器的输出是脉冲宽度调制(PWM)值,反映了执行器的速度,而执行器的方向是基于PWM符号。
表1显示每个PID增益参数的最终值,包括比例常数,KP,积分常数,KI和衍生常数,KD为太阳能跟踪器的参数。
2.5、数据收集
对太阳能跟踪器的性能进行了评估比较后产生的太阳能跟踪和固定倾斜光伏系统如图5所示。固定倾斜光伏系统手动对准北偏南方向开始现场测试,以获得最佳功率。太阳开始升起时,太阳跟踪器开始移动光伏电池板相应的位置,而固定倾斜光伏系统与现场测试的开始时候保持一致。在沙垱、马来西亚北偏东101.72°方向对两系统进行了测试,这两个光伏模块单晶为基础,规格见表2
2.5.1、实验装置
为了避免周围建筑物和树木的阴影这两个光伏面板模块被放置在一个开放的区域。这些模块被放置在彼此3米距离。光伏发电模块生的最大功率是的时候在中午,太阳位于在地平线之上的最高位置。中午太阳的位置每天都不同,因此为第二天的能量收集固定倾斜的光伏面板是夜间提前面向太阳中午位置。
2.5.2、气象站
太阳辐射信息是由观测天气的站点即戴维斯气象站Vantage Pro2(DWS)提供的。它记录了每日每15分钟测量的数据,所有这些数据被远程存储在一台电脑里。
2.5.3、数据记录器
为了测量,系统使用了两个光伏发电模块,12通道和10位模拟数据记录器。数据记录器通过电压和电流传感器测量光伏模块电压和电流。自光伏模块产生的最大电压为18 V电压传感器的输出增益设置为0.4。另一方面,以霍尔效应为基础的霍尔传感器被用来转换电流,从光伏模块产生的流量到40毫伏每安培的模拟电压。数据记录器的日志记录率为间隔1分钟,并从上午6时至下午8时自动对系统的电子和致动器的功耗进行了测量,并使用同一数据记录器记录。设置为测量率每秒一次的数据记录器来测量总功率追踪系统的消费。
3、结果与讨论
3.1、太阳轨迹评价
表
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[136929],资料为PDF文档或Word文档,PDF文档可免费转换为Word

