
英语原文共 9 页
并网双馈感应发电机模态分析
Francoise Mei, Student Member, IEEE, and Bikash Pal, Senior Member, IEEE
摘要:本文介绍了并网双馈感应发电机(DFIG)的模态分析。计算并观察了不同系统参数,工况点,电网强度的模态参数的变化。结果可以更好地帮助理解DFIG在不同传动系参数下的(非扭转)和扭转模态力学,这对于控制器的设计以及模型修正也适用。
索引项 – 双馈感应发电机,特征值分析,非线性动态模型,小信号稳定行分析。
引言
传统意义上,电力系统的振荡行为主要由同步发电机间通过电网的相互机电作用所主导。由于使用感应发电机的风能转换系统(WECS)的比例正在显著增加,因此研究此类异步发电机对系统稳定性的影响非常重要。
双馈异步发电机(DFIG)的动态特性已经被众多学者研究过。这些研究主要从时域模型出发,研究了对电力系统的动态影响、解耦控制、最大功率跟踪、对电网扰动的响应、故障穿越行为,使DIFG表现为同步发电机的控制方法等。时域分析法从直观上提供了对DFIG的动态特性分析,却无法确定和定量分析这些问题的内在原因。而这种补充信息可以通过特征值分析法获得。
早期已经有过在WECS应用中恒速风力发电机和转差能量回馈应用中变速风力发电机的研究。本文讨论了并网双馈风力发电机,并采用单机无穷大系统(SMIB)的研究方法。
本文的结构如下。在第二节简要回顾了建模原则。第三节给出了基本工况分析,阐述了DFIG的小信号模型分析。在第四至第七节中,研究了不同参数、工作点、电网强度的特征值轨迹,确定了可以忽略定子暂态过程的条件。第八节给出了总体结论。
单机无穷大系统(SMIB)如图1所示。双馈感应电机将输入的机械功率转化为电能。定子侧功率恒为正。转子侧功率通过转子侧换流器的作用,既可为正也可为负。这允许发电机能以次同步或超同步状态运行。
图 1 并网DFIG系统
建模
风轮结构
风轮主要由桨叶和轮毂组成。它的作用是捕获风能并且以机械动力的形式将其传递给发电机。
可以使用叶片结构的有限元分析法或者计算流体动力学法等方法对叶片周围的空气动力学进行建模。一般而言,这些详细模型通常用于风轮的设计以及机械测试。
对于稳定性分析,使用代数模型,可以忽略与风轮、偏航机构、塔架相关的动力学。代数模型反映了一个事实:捕获的功率只是可用风能的一部分。(理论最大值=贝茨极限)
本文假设输入机械功率是恒定的。换言之,假设风速和桨距角在整个研究过程中不发生变化。
传动系统
在风力发电系统分析中,传动系统被建模为一系列通过无质量轴连接的刚性盘。对于传统发电厂中同步发电机(SG)的小信号分析,常采用单质量模型或者集总质量模型,因为传动系统表现为单等效质量,这是因为机械刚度(发电机、风轮)远高于等效电气刚度(发电机以及总线间)。在这种情况下,感兴趣的模式通常可以互换地称为“系统模式”、“非动态模式”或者“机电模式”。
对于风力发电场的DFIG而言,机械参数是不能互换使用的。齿轮箱的存在使得轴更长,从而产生等效的电气刚度。较低的轴刚度加上比风轮轻得多的发电机质量,导致没有“系统模式”的动态行为。换言之,无法将传动系等效为单质量系。
因此,做带有双馈感应发电机的WECS的小信号分析时,必须要考虑采用多质量传动模型。一般来说,考虑两质量块模型(一个用于风轮,一个用于发电机)就足够了,因为叶片和轮毂相关的模式阻尼超过了感兴趣的频率范围。
对每个质量块(转速)和轴(扭转角)运用牛顿定律分析:
和[单位(p.u.)]分别是风轮和发电机转速;[rad]是扭转角;和[s]分别为风轮和发电机惯量;[rad/s]是电角速度;[p.u.]是风机输入功率(这里假设为恒定值);和分别为轴和发电机转矩:
[p.u./el.rad]和[p.u.s/el.rad]分别是轴刚度和阻尼系数,,,,和在第二节C中定义。
发电机
通过将三相电压方程转换为同步旋转坐标系下(也成为dq坐标系[3])。在本文中,abc-dq变换是以d轴超前的恒功率变换。对于稳定性分析,发电机通常建模为基于暂态阻抗的等效电压源,通常定义以下变量:
和[p.u.]分别是q轴和d轴等效内电势;和分别是转子q轴和d轴的磁通量;;,,[p.u.]分别是定子,转子和互感。[p.u.]是转子电阻。
在平衡以及磁通不饱和情况下,相应的DFIG模型是:
其中,和[p.u.]分别是定子q轴和d轴电流;[p.u.]是同步转速;;[p.u.]是定子电阻;并且有和。
发电机有三个动态部分:定子电气部分(10),(11);转子电气部分(12),(13);和转子机械部分。传统同步发电机的稳定性分析忽略了定子的暂态过程。此处则包括定子暂态过程以检验该假设的有效性。
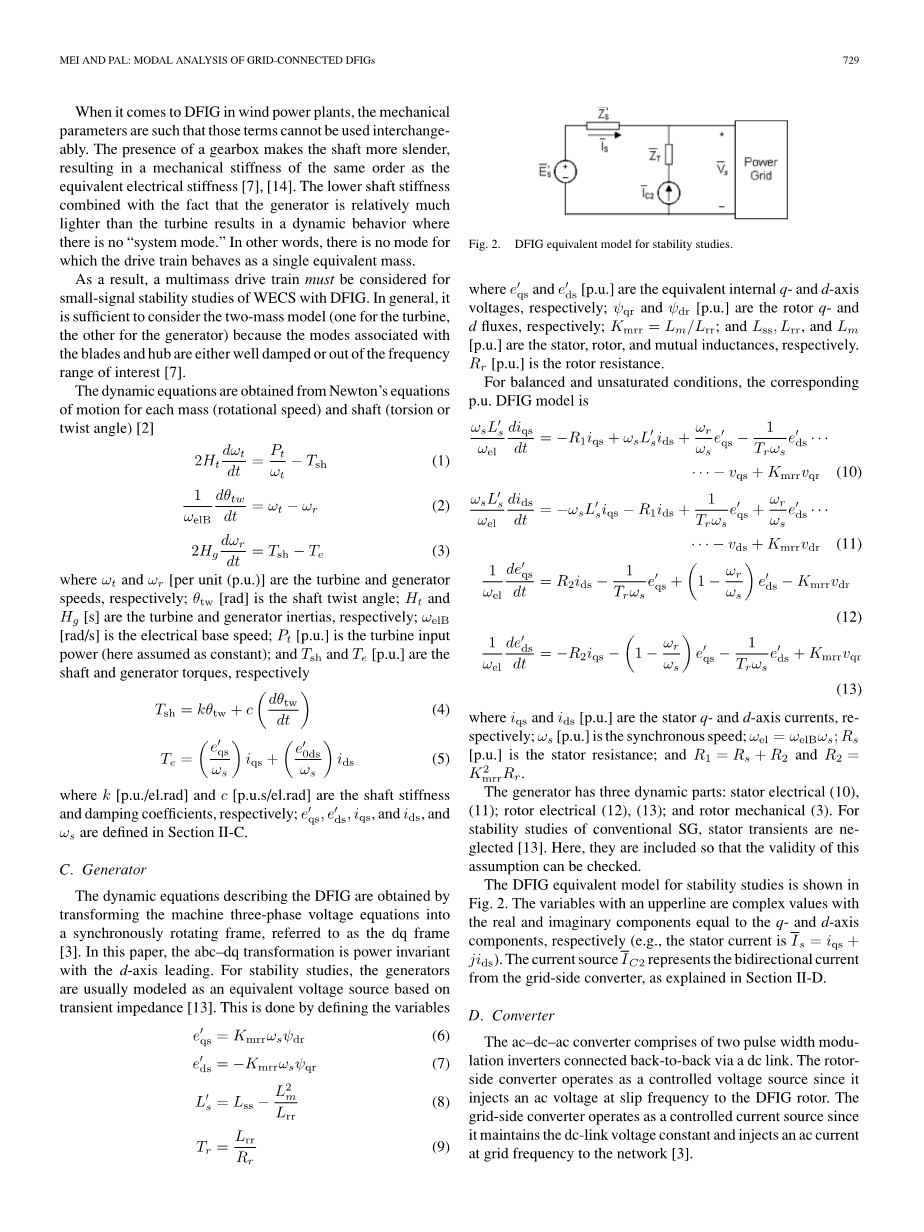
用于稳定性分析的DFIG等效模型如图2所示。带上线的变量是复数,实部和虚部分别对应于q轴和d轴电流分量(例如定子电流)。电流源表示来自网侧变流器的双向电流,如第二节D所述。
图 2 用于稳定性分析的DFIG等效模型
变流器
AC-DC-AC变流器包括两个背靠背、通过直流母线连接的脉宽调制变流器。转子侧变流器表现为一个受控电压源,因为它向DFIG的转子施加转差频率下的交流电压。网侧变流器表现为一个受控电流源,因为它支撑直流母线电压并且将电网频率的电流注入电网[3]。
转子侧变流器的AC电压取决于被控目标。对于并网的WECS应用,较为合理的选择是对最大功率捕获(等效气隙功率,电磁转矩或速度约束)施加约束条件,对电压控制施加另一个约束条件(无功功率约束)。这两个控制目标决定了DFIG的转子电压
,,
控制目标通常设定在变流器dq轴上,实现对有功功率和无功功率的解耦控制。实现对转子侧变流器有功功率控制的一个简便方法是设定一个参考转矩,作为发电机转速的函数[3]。通过这种方法,可以将发电机的转速结合起来,避免测量风速。
对于网侧变流器,必须协调控制以使直流母线电压维持稳定,并且交换定子侧的无功功率。定子和网侧变流器交换的无功功率可任意选择。如本文假设那样,对于变流器最小的给定值,则不进行交换,输送到电网的无功功率仅由定子提供。因此,在单位功率因数下,网侧变流器的电流使得流入电网的有功功率与转子侧变流器相匹配。
,,
假设电流环的速度足够快并且准确,直流母线电压可以视为恒定值,并且不需要直流母线电容的动态模型。直流母线电容对变流器可以视为电压源。对于转子侧使用二极管整流器的应用,直流母线的动态过程不可以忽略,因为存在直流能量存储装置、较大的直流元件以及较弱的控制能力。然而对于背靠背变流器来说,适当的控制策略消除了直流母线中储能的需要,并且确保了恒定的直流电压。
本文假设AC-DC-AC变流器是由无损耗元件构成,并且不考虑转换过程。在开环状态下进行分析,例如转子电压维持在其初值。闭环控制器则不包括在内,因为它们引入的特征值配置非常依赖于控制策略和增益,所以关的小信号分析不会真实反映DFIG的动态特性。
外部电网
为了完成对并网DFIG的建模,还需要两个方程,及发电机与电网之间交换的有功功率以及无功功率。
本文中,假设电网为无穷大系统,所以有
由发电机输出的有功功率和无功功率为,,,;是定子电压的幅值;和是电网电压的幅值以及功角;是线路阻抗。
模态分析——基本情况
初始条件
电力系统模型的初始化是时域和频域分析的起点。这分两步完成。首先,进行潮流计算,以获得每根母线的电压大小、功角、注入有功和无功功率。然后,利用所得到的潮流解,通过求解其全时导数为零时的微分方程组(DAE),对发电机进行初始化。
动态模型的线性化
电力系统的数学模型可由一组微分方程表示:
其中x,z和u是状态、代数和输入变量;f和g分别是微分和代数方程的向量。在小信号分析中, 和通过在点出的泰勒级数展开线性化,忽略二阶及以上的项,并且消去代数变量,得到系统状态变量矩阵:
如第四节所示,通过特征值来研究系统动态特性。本文中,,,,包含在(10)—(13)和(1)—(3)中,包含在(6)和(7)中。
基本情况分析
研究了如图1所示的SMIB系统。在基本情况下,端电压为1p.u.,总的有功功率为1p.u.,速度假设为同步转速。同时也假设DFIG直接与无穷大总线相连,即输出无功功率为零,端电压保持不变。接下来对电网强度的影响进行了研究。
基本情况下的特征值如表1(A)所示。模态振荡频率,阻尼比,参与因子如表1(B)所示。如下所示通过观察参与因子来确定模式。
表 1 基本情况分析
基本情况有四种稳定模态,其中三种是振荡模态。参与因子显示了模式的物理性质:是与风力机轴系(风力机转速和扭转角)相关的机械模态;是与转子相关的机电模态;是与定子相关的电气模态;是与转子相关的非振荡电气模态。参与因子还表明,由于一个特定的状态变量只参与其中的一个模式,所以模式间是彼此解耦的。
机械模态(Mechanical mode)是主导模态,它的频率非常低(0.5Hz),具有适当的阻尼比(10%)。机电模态(Electro-mechanical)有更高的振荡频率(10Hz)和稍好的阻尼比。定子模态(Stator mode)有最小的阻尼比,然而,它的时间常数很小(具有较大的实部模值)并且它的振荡频率更高,超出讨论范围。
如图3所示,可以看到三种振荡模式过程。该图描述了时域中DFIG的有功功率对端电压阶跃变化的响应。细线和粗线分别表示了DFIG对有无定子动态过程的响应。关于是否可以忽略定子动态过程的条件将在稍后进行讨论。
图 3 时域中DFIG模式曲线图:有功功率对端电压变化的响应。
模态分析——参数的影响
本节研究了传动系和发电机不同参数特征值的变化。对于传动系,研究了刚度和惯性值的影响。对于发电机,研究了互感和电阻值的影响。
传动系参数
仅仅改变刚度和惯性的值,同时将其他参数保持在基本值,不会导致电气模式的特征值位移(定子和非振荡模态),因此,接下来只讨论机械模态和机电模态的作用。
对于两质量块模型,机械状态的变化会作用于两种模态。一种是较低的频率,即非扭转模态(导致惯性的同相振荡)。另一种是较高的频率,即扭转模态(导致惯性的反相振荡)。机械参数决定了这两种模态中的哪一种占主导地位,以及它们是机械模态还是机电模态。
对于具有柔性传动系DFIG的WECS系统,刚度值较低,惯性大约为1阶(lt;1 p.u./el.rad,)[7],[16]。在这种情况下,非扭转模态占主导地位,如表2(a)所示,其中低频模式(0.54 Hz)最接近虚轴,并且只有风力机轴系状态显著参与。
对于传统的同步发电机,刚度较高,惯性具有相同的阶数(ge;50 p.u./el.rad,)[7],[13]。在这种情况下,扭转模态占主导地位,这
是一种机械模态,如表2(a)所示,其中较高频率模态(20.47 Hz)最接近虚轴,仅在机械状态下有显著参与。一般来说,此模态超出了讨论的频率范围,在低频振荡的稳定性研究中不予考虑。
表 2 不同传动系参数下的(非扭转)和扭转模态
在表2(B)中,非扭转模态(NT)几乎同等地参与发电机和风力机。这两个因素的组合意味着对于刚性传动系以及相似的发电机和风力机惯性,传动系表现为机电模态下的单质量块模型。
对于柔性轴系(典型的带有DFIG的WECS系统),则不能进行相同的等效,如表2(A)所示。在这种情况下,术语“系统模态”、“机电模态”和“非扭转模态”是不可互换使用的,正如同步发电机一样。
发电机参数
在各参考文献中表现出差异性最大的(见附录)作用参数是互感和定子电阻 。
- 互感:在其他参数保持恒定的情况下,改
变互感值不会显著导致电气模态下的特征值位移(定子模态和非振荡模态)。对于机电模态和机械模态,相应的特征值位移如图4所示。
图 4 增加互感的机电模态和机械模态的特征值轨迹(=1-5p.u.)。
对于这两种模式,当增加时,虚部的幅值减小,而实部的幅值则有所增加。互感可以看做气隙的长度,大电感代表小的气隙长度。所以观测结果表明,与大气隙长度电机相比,小气隙长度电机的阻尼性能更好,振荡频率更低。
- 定子电阻:在保持所有其他参数不变的情
况下改变定子电阻会引起所有特征值的明显位移。图5显示了从 到的特征值。随着定子电阻的增加,所有的振荡模态都有更好的阻尼,因为他们更加远离虚轴。
图 5 增加定子电阻的定子、非振荡、机电和机械模态的特征值轨迹(至)
非振荡模态在某一点上变得越来越负(),然后突然回到原点。
对于定子模态,振荡频率明显降低。然而,该频率仍在讨论的范围之外。对于机械模态,频率下降不太明显(见虚轴的比例)。对于机电模态,频率降低到某一点后(),又增加了。
参与因子也会受到影响,导致阻尼器()完全不同的动态特性。在这种情况下,如表3(A)所示,实
资料编号:[3662]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

