英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
上海大学学报(英文版),2006,10(1):53-58
文章编号:1007-6417(2006)01-0053-06
考虑中性点电位的新型SVPWM策略平衡三级NPC逆变器
陈国成,宋文祥,吴慧,孙承波,孙承波
上海大学上海市电站自动化技术重点实验室,上海200072,中国
摘要
本文提出了一种新的SVPWM(空间矢量脉宽调制)策略,用于三电平中点钳位电压源逆变器,基于所有冗余电压矢量的特定配置。新的调制方法显示与流行的八级中心相比,谐波电压的优越性能和中性点电位的平衡控制SVPWM。通过精确修改小矢量的冗余因子,实现对逆变器中性点电位变化的抑制对,仅需要直流环节电容器电压和三相负载电流的信息。这样便于应用,并且与数字计算机的实现相媲美。通过仿真和实验结果验证了所提控制方法的可行性。
关键词: 中性点钳位逆变器;中性点电位控制;SVPWM;分布因子。
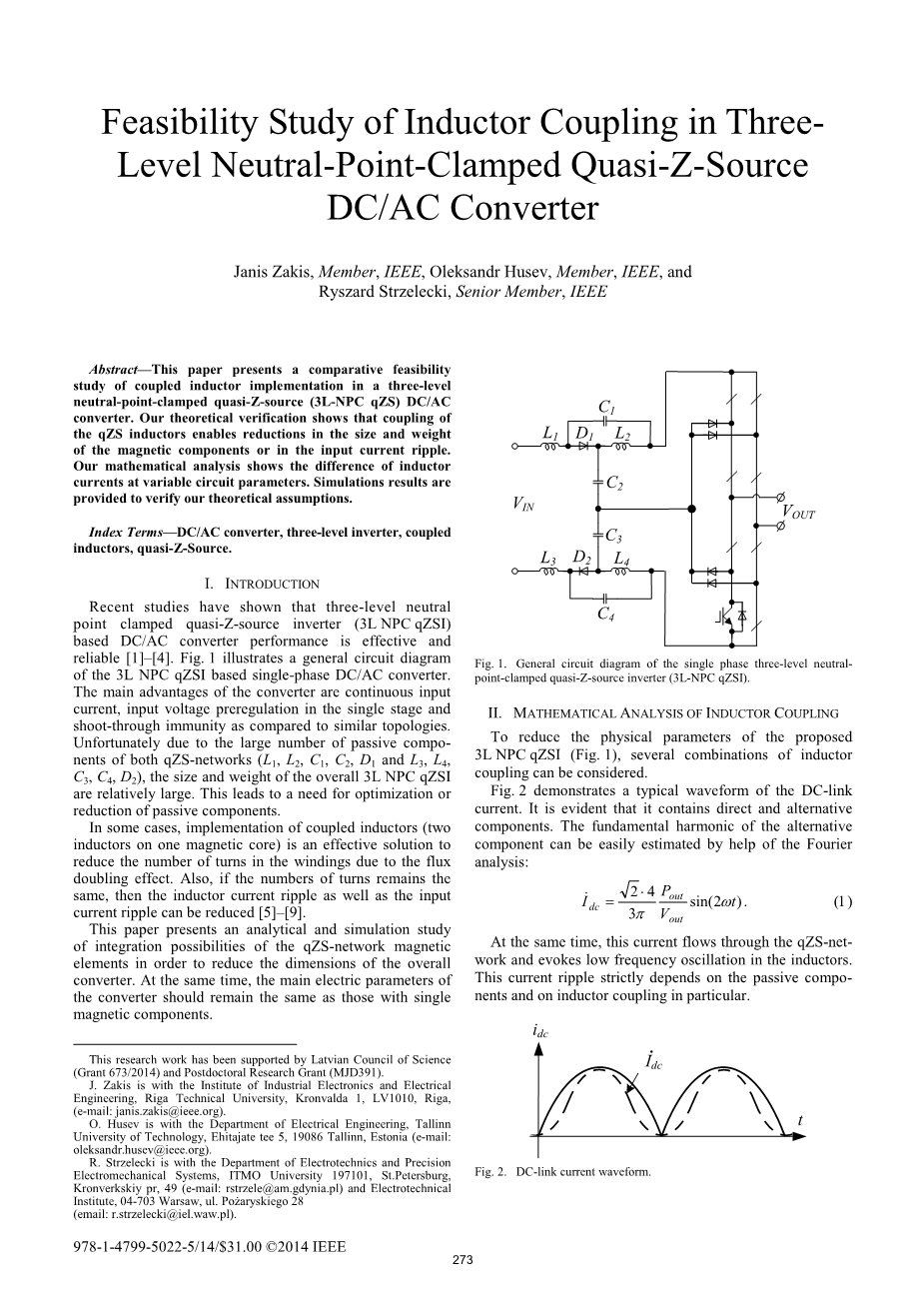
1简介
最流行的多级拓扑结构是三级逆变器[1-4],首先提出“中性点钳位(NPC)逆变器”,为电容器组选择相对较大的电容器。逆变器的输出电压主要取决于脉冲宽度调制策略。空间矢量脉冲宽度调制(SVPWM)因其广泛应用具有方便实现和充分的优点直流母线电压利用率。三电平逆变器原理图如图1所示。开关状态逆变器的数值可以用空间矢量表示如图2所示。他们可以分为零向量,小向量(内六角的顶点),中向量(外侧的中点)六角形)和大向量(外六角形的顶点)。零和小向量都有冗余切换状态。最受欢迎的三级SVPWM方法是以八阶段为中心的SVPWM提出的PWM技术[2-4],实际上是一个一种标量单极调制模式。但是,具有冗余向量的不同倾向可导致不同的空间矢量调制模式。然后这样SVPWM方法作为双极调制存在用于内六角,半双极或半导体在外部交替使用单极调制这种调制策略不仅更好输出电压和电流波形(低次谐波并且比流行的八级中心更低EMI)PWM策略,也完全支持中性点电压平衡控制。
中性点(NP)电位变化问题最近已经调查和几个控制技术已经发展[5-8] .SVPWM参考文献[7]中提出的方案是最有效的电压平衡控制的方法。但是,它是对于三电平逆变器来说相当复杂。参考文献[8]提出的NP平衡算法需要了解电机电流的功率因数并且特别是在瞬态下很难实现条件,与数字计算机不兼容因其复杂性而实现。
图1三电平NPC逆变器方案图
在本文中,首先开发了一个SVPWM方案用于基于不同配置的三电平逆变器具有冗余矢量,并且三相负载电流流入中性点的影响是分析研究中性点潜力。然后在这个SVPWM模式下,一个新颖的中性点提出了潜在的控制技术。最后是提出的SVPWM方案通过模拟和验证实验结果。模拟与实验结果表明,提出了控制方法可行,方便实现,实用。
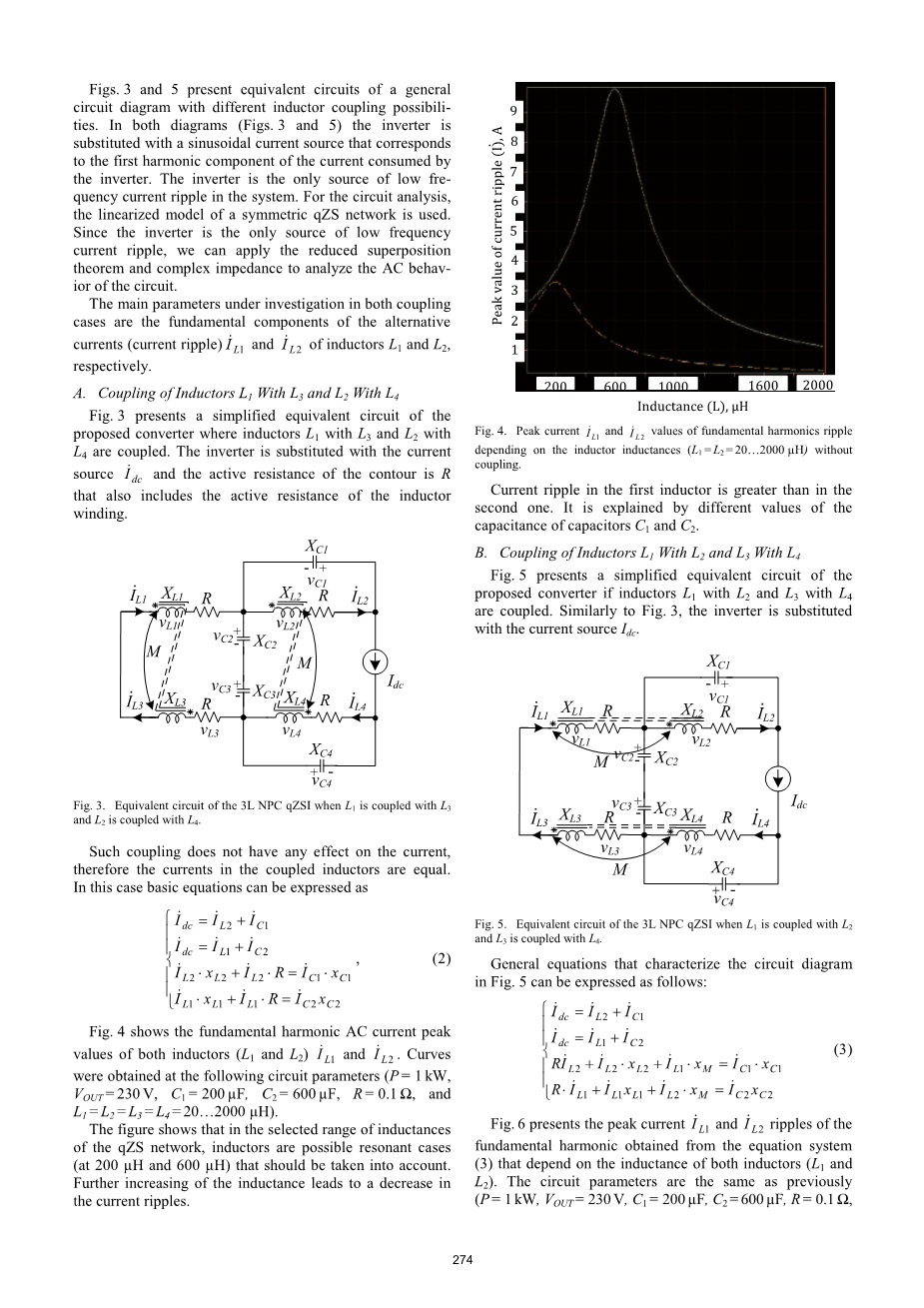
图2空间电压矢量及其切换三电平逆变器的状态
2个SVPWM用于三电平逆变器
2.1输出电压矢量及其持续时间
如图2所示,空间矢量图由六个大电压矢量图分成六个三角形部分。如果我们从大电压矢量PNN开始,整个区域可以定义为扇区Ⅰ,Ⅱ,Ⅲ,Ⅳ,Ⅴ和Ⅵ每60度。扇形Ⅰ,这是第一个60度,首先分析了学位区域,然后对其进行了分析整个360度区域可以实现它的对称性。
图3显示了如何形成参考矢量它的三个最接近的电压矢量。例如,它是假设目标参考向量落入子三角形C,则应将以下两个方程式作为空间矢量PWM规则:
V1Ta V2Tb V4Tc=VrefTs (1)
Ta Tb Tc=Ts (2)
其中,Ta,Tb和Tc分别是电压矢量V1,V2和V4的持续时间,Ts是控制在SVPWM方法中循环。
图3扇区Ⅰ中所需向量的向量方法
将Vref=Vref°(cos jsin)代入(1),可以计算Ta,Tb和Tc,结果如下:
Ta=Ts[1-2k sin] (3)
Tb=Ts[1-2k sin()] (4)
Tb=Ts[2k sin()-1] (5)
其中k=2VVref/。
在其他子三角形(A,C,D)中,每个的持续时间电压矢量可以用同样的方式计算这里省略了详细的计算程序根据对称性特征,可以容易地获得其他5个扇区的结果。
2.2参考矢量位于三角形A中
所有第一个输出空间矢量都是零矢量(PPP)对于这个三角形中提出的SVPWM模式,因此,输出向量中断可以有效地避免部门转换过程。
如,如果目标参考向量位于a中扇区Ⅰ的小三角形A,输出电压载体序列是PPP→PPO→POO→OOO→OON→ONN→NNN→ONN→OON→OOO→POO→PPO→PPP。图4显示了详细的三相时序图。然后三相门控信号对应那些根据三相时序图可以得到三相开关器件。在此之下双极性PWM模式,两个冗余电压可以使用小三角形A的矢量有利于中性点电压的变化抑制许多。
2.3参考矢量位于三角形C中
同样,为了确保输出电压波形的平滑性,输出电压矢量应该断开有效避免。然后是第一个输出空间向量是一个正的小电压矢量(PPO)目标参考向量下降时的SVPWM模式的三角形C。详细的输出电压矢量序列是PPO→POO→PON→OON→ONN→OON→PON→POO→PPO。图4(b)显示了详细的输出电压。 相位时序图,表明了PWM模式是半双极性的。同样,在这种半双极性PWM模式下,两个冗余电压矢量可以使用小三角形C,它们是相同的有利于中性点电压的变化抑制非常像小三角形A。
图4输出电压矢量的时序图三角形A和三角形C
2.4参考矢量位于三角形B&D中
由于仅使用一对冗余向量组成小的目标参考向量三角形B和D,在这样的距离内,产生PWM模式是单极的。也就是说,只有一对每个开关装置的所有四个开关装置的开关装置在一个开关周期中,相位换向一次其他一对开关设备保持开启或关闭。三相输出电压矢量时序图如图5所示。它们不同与小三角形A和C。这里只有一对冗余电压矢量可用于抑制中性线的变化点电压。
根据以上讨论,可以实际提出所提出的SVPWM方法,与流行的八阶段中心SVPWM相同的单极PWM方法的方法。两种PWM方法利用三个最近的电压矢量来合成目标参考矢量前一种方法,每种都有四个开关装置相位必须在一个开关周期中进行一次换相,因此脉冲数在输出线到线上电压是后者的两倍。但是,在后一种方法,只有一对开关装置每相的所有四个开关装置换向在一个开关周期中,另一对开关设备保持打开或关闭。
图5三角形输出电压矢量的时序图B和三角形D
3中性点电流分析
如果是小电压矢量或中压矢量在SVPWM方案中选择,可以连接一个或两个三相负载电流的相位输出中性点,这将导致中性点电流干扰NP电压变化。中电压矢量连接其中一个相电流NP使NP电位部分依赖于NP装载条件。
每个相脚的输出电压状态为三电平逆变器只显示三种情况。有积极水平,消极水平或中等水平。因此瞬时输出PWM电压可以表示为开关状态表示为:
Vs=[Sa,Sb,Sc]T (6)
其中Sx = -1,0,1和x = a,b,c。
当一相的输出被钳位到中性点(Sx = 0),此阶段的负载电流通过相应的流出中性点钳位二极管。因此即时中性电流可以表达为[8]:
iNP(t)=[1-abs(Sa)]ia [1-abs(Sb)]ib [1-abs(Sc)]ic
=-abs(Sa)ia-abs(Sb)ib-abs(Sc)ic (7)
NP电流流出直流链路电容器必须导致NP潜在的变化。因此NP平衡控制策略的目标是制定在一个PWM中,平均NP电流流出NP零循环使得每个NP电压变化为零PWM周期(Ts).NP电压平衡的铰链控制是产生预期的极性NP电流平衡直流电容电压,应用适当的冗余小矢量。
4中性点电压平衡控制
根据上面第3节的分析,它是必须采取平均NP电流流出NP为零,以便在每个PWM周期内使DC电容电压的变化为零运行过程中,NP电压可能会从中漂移平衡情况,或初始容量电压是不相等,因此适当的NP电流(电荷)应注入NP,以便NP电压可以试图走向平衡。
在每个调制周期中,现有的变化对两个电容器的直流电压进行采样并计算为:Uc = Uc1 -Uc2。 (8)
当存在NP电位的偏差时,在调制周期内最多禁止直流电压,调制周期内的平均中性电荷应该控制为:
QNP0 =- (9)
其中CDC是直流电容器的电容。
为了提高NP控制性能,应考虑NP瞬时电流的极化当目标参考向量落入小三角形A和C时。为简化控制系统而制作实现简单,分配因子k为应选择两对冗余向量作为如下:
如果两个NP电流的极性冗余积极的小载体是相同的,则
tpa=kta,tna=(1-k)ta
tpb=ktb,tnb=(1-k)tb
如果它是反向的,则
tpa=kta,tna=(1-k)ta
tpb=(1-k)tb,tnb=ktb
其中tpa,tpb和tna,tnb是正的持续时间小矢量和负向量为两对分别为冗余向量。
根据方程(7),并考虑到三相桥臂的开关状态如图所示图3,也假设三相负载电流保持不变,分别定义为Ia,<em
全文共6130字,剩余内容已隐藏,支付完成后下载完整资料</em
资料编号:[1556]

