英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
附录A 译文
基于 PWM 技术的电能质量改善
摘要
本文阐述了供电时谐波对电能质量的影响。本文还论述了应用于减少谐波以及改善基本峰值电压的不同 PWM 配置技术。此外,还综合比较不同技术的总谐波失真、FFT(快速傅氏变换算法)和主导谐波分量等参数。本文附有 MATLAB 的仿真波形以及怎样修正仿真参数。在传统的定时采样 PWM 技术可以很容易达到允许的最小谐波,这让 PWM 改善电能成为现实。本文描述了使用新型 PWM 技术来提高电能质量这一课题的发展趋势。
关键词:场效应管,电能质量,调制技术,总谐失真。
1.引言
电能质量:“power quality”这个词有很多复杂不一的解释,这不仅仅是应为在美语中“power”与“electricity”是同义词,而是因为这个词还有单位时间内传输多少电能的意思。不同专家给出了不同的定义。下面给出统一的定义:实际电压值与理想电压值之间的偏差。理想电压是振幅和频率不变的正弦波。电流质量与电压质量是类似的,也是实际电流与理想电流的偏差。即理想电流也是振幅和频率不变的正弦波,但要求与当前的正弦电压有同的相位。
图 1(a) 电压和电流线性负载波形
图 1(b)非线性负载时电压及电流波形
图 1(c)对称谐波分量波形
电能质量[1]是衡量电压质量和电流质量的一个整体。供电质量是衡量电网电压水平与普通用户之间一个整体。同时用电的质量与长期供电质量是相辅相成的。
2.PWM 技术
当今先进的固态功率器件和微处理器的飞速发展,开关电源中使用了更多和更现代 的电机驱动来转换、输送电机电能。开关电源是通过脉冲宽度调制(PWM)信号作用于功率晶体管栅极来控制电机运行。PWM 信号是固定频率和占空比可变的脉冲序列。在每个PWM 周期有个的固定占空比的脉冲。然而,脉宽的变化是按照调制信号从一个脉冲过度到另一个脉冲。当 PWM 信号施加到功率晶体管的栅极,根据相同的调制信号,改变打开和关闭晶体管的时间间隔,从而改变一个PWM 周期到另一个PWM 周期。PWM 信号的频率必须比调制信号的基频高得多,这样才能使传递到电机及其负载的电能主要取决于调制信号[2]。
PWM 的优势(基于比较线性功率放大器与开关电源 PWM) :易于操作和控制,没有温度变化和老化引起的漂移或线性失真,与当今的数字微处理器相兼容,低功耗。
PWM 的缺点:大幅增加开关频率(在PU从1到21情况下),这意味着有更高要求对于相关的开 关设备。同时产生高频谐波成分。电流控制精度低。
下面是一些主要关注的问题,从而比较不同的PWM技术:低开关损耗。
良好的直流电源利用率,具有相同直流电源输出更高电压的直流电源。
良好的线性电压或是线性电流控制。尤其在低频区域工作时容易输出含有低频谐波成分的电压和电流。
基本的PWM技术是:
1、单脉冲宽度调2、多脉冲宽度调制3、正弦脉宽调制(SPWM)
然而随着技术不断的进步,许多研究者提出了许多不同的先进调制技术[3],例如:
1、梯形调制2、阶梯调制3、阶梯调制4、注入谐波调制5、增量调制
6、空间矢量调制(SVPWM)7、随机 PWM
3.PWM控制方法
由于转换器有能力来控制输入的正弦波电流,功率因数(UPF)可以容易地操作通过调节伴有前述电源电压。各种控制策略已经提出了在最近的这种类型的PWM整流器产品。它可以被分类为所用的回路控制器或有功/无功功率控制器。在知名间接的有功和无功功率控制方法中,是基于相对于电流矢量方向所述的线电压向量。它被称为电压定向控制(VOC)。VOC保证了高动态,并通过内部电流静态性能控制回路。然而,最终的配置和性能的VOC的系统在很大程度上取决于所施加当前的控制策略的质量。在过去的几年中,一个高利润的新兴控制技术一直是直接功率控制(DPC)和与众所周知直接转矩控制开发相似(DTC),用于可调速驱动器。在DPC方案,没有内部电流环路和转换器的开关状态,是通过一个交换表基于瞬时错误作出适当地选择,在命令和估计瞬时有功和无功功率值的估计值,和功率源电压矢量位置或虚拟磁通矢量位置之间。本文提出了一种新的直接功率控制(DPC)的三相PWM整流器,这使得有可能实现通过直接控制它的瞬时功率因数运行无需任何电源电压有功和无功传感器。这个新的转换表是通过分析瞬时有功功率和无功功率校正合成的。其他一个是模糊逻辑控制器,在直流母线电压控制回路,开发提供有功功率命令。为了实现单位功率因数运行,无功功率指令设定为零。基于模糊逻辑控制器有更多的灵活性和更好的动态响应。最后,DPC进行了模拟,并实施常规PI控制器和模糊控制器。它是通过仿真和实验结果表明,该提出的DPC具有高性能相比于经典。线电流非常接近正弦波形,是直流母线电压精确调节得意实现,和UPF操作得以实现。此外,基于模糊逻辑控制器有优良的瞬态性和稳态性,有良好鲁棒性,直流总线电压调节有良好的动态特性和良好的甩负荷扰动的影响。
4.DPC的原理
4.1系统配置
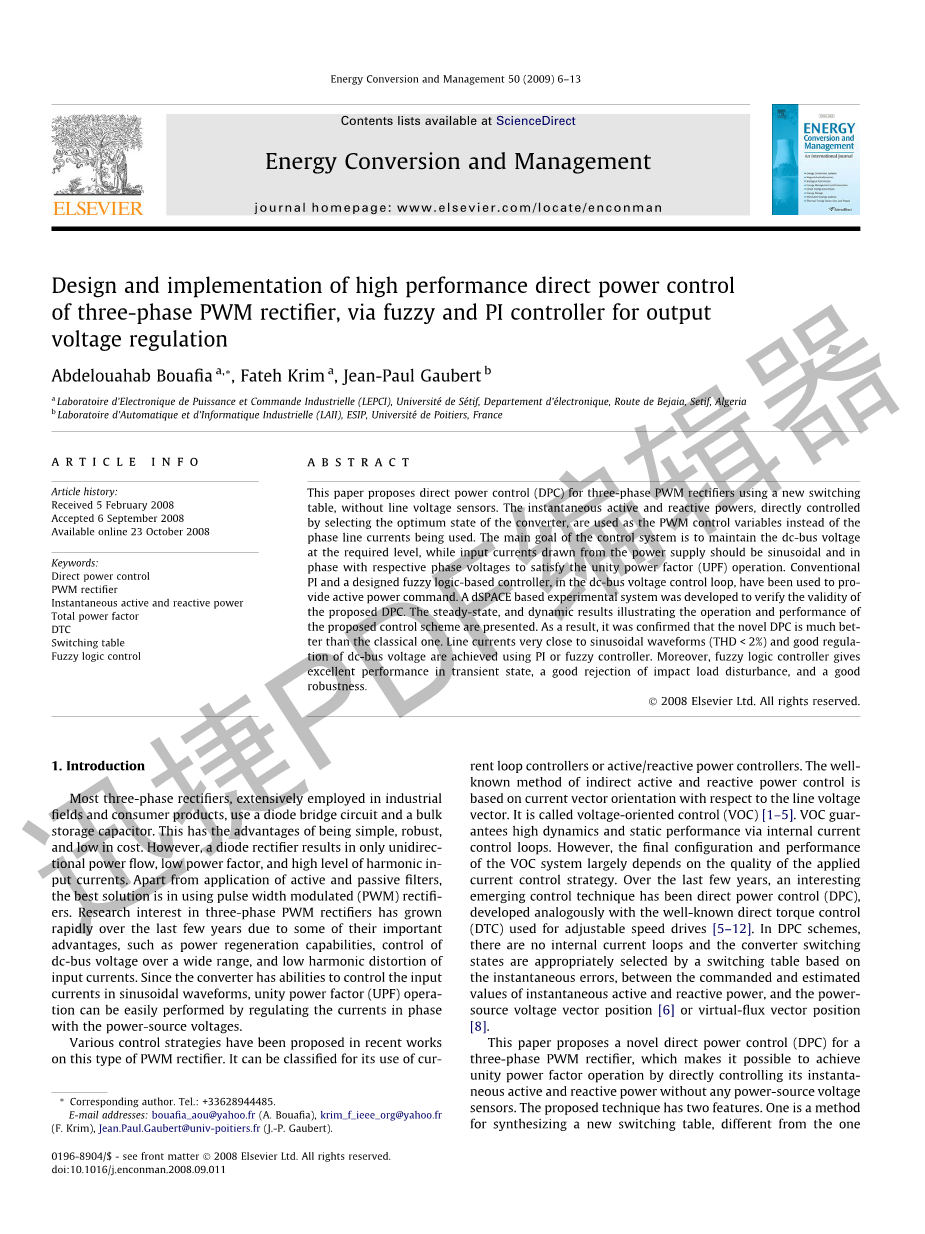
DPC基于瞬时有功和无功功率控制回路。DPC没有内部电流控制回路。开关变换器开关状态是由基于在指令和有功功率和无功功率之间的瞬时错误的开关表来选择的。图2显示了直接有功功率和无功功率控制三相PWM整流器的配置,符号如下:ea、eb、ec为三相电源电压;va、vb、vc为交流端PWM整流器的电压;ia、ib、ic为三相线电流;Sa,Sb,Sc为转换器的开关状态;L、R为电感和电阻的反应堆;C、RL为直流环节电容和负载电阻。
图2 三相PWM整流器的DPC控制
控制器功能继电器通过迟滞比较器和一个转换表控制有功功率和无功功率。在这个配置中,直流母线电压通过调节有功功率被控制的,功率因数通过控制无功功率为零获得的。如图2所示,有功功率命令P *来自一个直流母线电压控制器,无功功率命令,q*是直接从外部控制器的给定。在指令和预计的反馈功率之间的错误输入到迟滞比较器和数字化的信号Sp和Sq,在这里表示为: ,
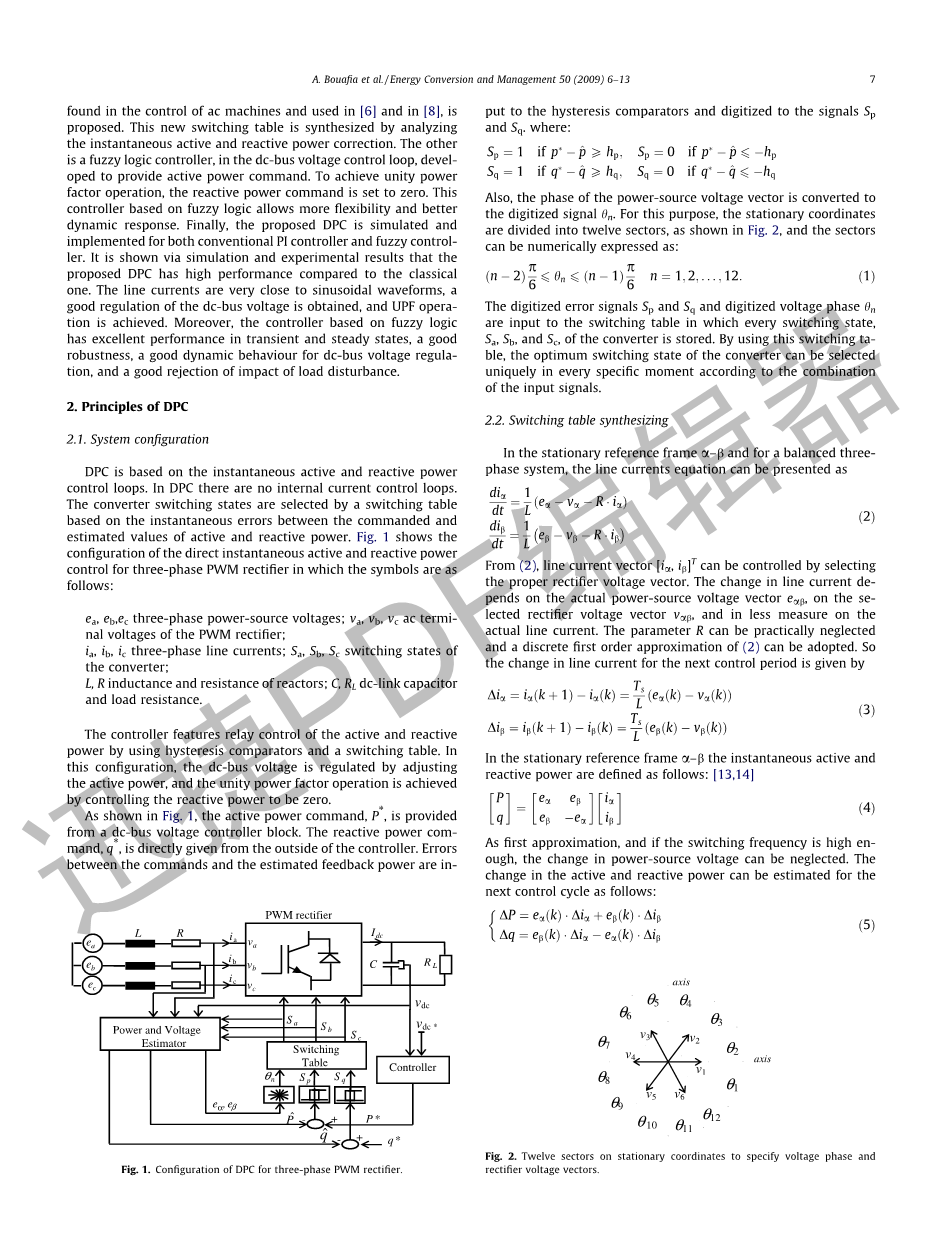
同时,电源电压的相位矢量转换为数字化信号hn。为此,固定的坐标分为12个部分。如图2所示,这部分数值上表示为:
(1)
数字化误差信号Sp和Sq和数字化电压相位hn输入转换表包括每一个开关状态,转换器的Sa,Sb,Sc被储存。通过使用这个开关表,根据输入信号的组合,转换器的最优开关状态能够在每一个特定的时刻被独特地选择。
4.2 转换表合成
在静止的参考系a-b和一个平衡的三相系统,线路电流方程可以表示为
(2)
线电流矢量(ia,ib)可以通过选择控制恰当的整流电压矢量。在选择整流器电压矢量vab上,在实际的线电流测量上,线电流的变化依赖于实际的电源电压矢量eab。参数R可以几乎被忽视(2)中的离散的一阶近似可以被采纳。因此,线电流的变化对下一个控制时期给出:
(3)
在静止的参考系a-b瞬时有功功率和无功功率定义如下:
(4)
作为第一近似,如果切换频率足够高,电源电压的变化可以忽略不计。有功功率和无功功率改变量下一个控制周期可以被估计,如下:
(5)
(6)
图3 在固定坐标上的12个扇区指定电压相位和整流器的电压矢量
如图3所示,控制有功功率和无功功率有六个基本的不为零的整流器整流电压和两个零电压矢量。有功功率和无功功率取决于整流电压矢量的选择。对于七个基本的整流电压矢量,我们得到七个可能的有功功率和无功功率的变化量。因此,有不同的选择相应的开关状态控制有功功率和无功功率变化的方法。给i=(0,1,2,3...6)有功功率和无功功率变化量如下:
(7)
电源电压向量可以被表示在静止参考系a-b如下:
(8)
在(a,b)中这个向量可以表示为:
(9)
E是线电源电压的均方根值和h是电压源的角位置向量定义为:
PWM整流器的交流终端电压矢量v,是典型的空间矢量,每个开关状态和其相应的表示,va和vb值如表1所示。
表 1 整流器电压空间矢量
在(alpha;, beta;)中,整流电压矢量通过如下公式给出:
(10)
替换(9)(7)
(11)
有功功率和无功的变化量表示为:
(12)
为了满足提高PWM整流器的转换器操作,需要满足下面条件:
从(12)可以看出,无功功率的变化相对于整流电压矢量vi是正弦波形。有功功率的变化移动着的正弦波,各自表示在图4和5中。DPC的基本思想是,为了维持直流母线电压接近参考价值,并通过控制有功功率和无功功率保持统一功率因数,在七个可能的向量之间选择最好的整流器电压矢量。出于这个原因,新的开关表合成,基于每个部分有功功率和无功功率的变化。从图4和5,对于每个部分,无功功率的变化量是三个整流器电压矢量和正数,三个整流器电压矢量和负数,和v0为零。有功功率的变化对于四个整流电压矢量是正的,对两个或三个整流电压矢量负的。比如,有功功率和无功功率的变化如表2。
对于每一个滞后输出信号的组合,Sq和Sp,整流器电压矢量在部分1被选择,在表3中被表示。
所有部分提出的新的开关表被表示在下面的表4中。
实现电压DPC无传感器运行对于三相PWM整流器,通过使用转换器的开关状态,三相线电流,直流母线电压和电感反应,估计有功功率和无功功率。如下:
(13)
(14)
分别通过13和14,估计瞬时有功功率和无功功率之后,电源电压矢量Eab使用以下方程估计:
图4 无功率变化
图5 有功率变化
表 2 整流器电压空间矢量
表 3 整流器电压空间矢量
表 4 整流器电压空间矢量
5.输出电压控制器设计
5.1基于DPC的传统的PI
如图6所示,直流母线电压vdc与参考值vdc相比较。获得的误差作为PI控制器的输入,输出乘以vdc得到瞬时有功功率P *。
图2中的系统被建模为一个一阶系统:
图6 用于DPC的PI控制结构
PI控制器的传递函数:,其中;
PI参数选择:,其中。
5.2 DPC模糊控制器
图7显示了框图的模糊逻辑控制器,对于DPC的三相PWM整流器。由于控制算法的数字实现,直流电压,Vdc能与参考值相比较,差值:
采样时刻作为输入模糊控制器。输出有功功率命令是变化的,新指令通过添加模糊控制器的输出,输出增益比例G和先前指令:而获得的。
为了提高系统的动态性能和控制器输出稳定性,比例增益GP与模糊控制器并行。有功功率指定的新值被显示在图6中,给出:
误差e(k)和改变△e(k)作为数值变量,来自于系统。将这些数值变量转换成语言变量,七个模糊变量负数最大(NB)到正数最大(PB)表示在图8。所有的模糊变量相同的函数。图8得出了一个统一的结论,可以通过简单的修改获得每个变量。
图7 提出的DPC模糊逻辑控制器的原理图
图8输入输出模糊变量的隶属函数
本文的目标如下:
①、本文中提出,用三个成熟的多载波 PWM 技术(APOD、PD、POD 三种技术)发出的线性 电压去衡量逆变器总谐波失真的百分数。
②、用谐波失真和失真度来评估每种技术
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[443819],资料为PDF文档或Word文档,PDF文档可免费转换为Word

