英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
高功率密度三相数字化前馈补偿方法
维也纳PFC转换器
Lijun Hang,IEEE会员;Ming Zhang;Leon M. Tolbert,IEEE高级会员;Zhengyu Lu,IEEE高级会员
摘要 - 本文提出了一种基于三相双向开关维也纳拓扑结构的前端三相交/直流功率因数校正整流器。 一方面,整流器设计为在全功率下以连续导通模式(CCM)工作。 但是,在负载减小的情况下,它以非连续导通模式(DCM)工作。 另一方面,随着输入电感降低,即使整流器以全功率工作,DCM模式也会发生。 本文针对整流器提出了数字化前馈补偿方法,以减小DCM与CCM之间切换的影响。 推导了该方法的理论分析; 并给出了控制设计策略。 实验结果通过使用数字控制的维也纳整流器获得,验证了所提出的补偿方法
索引术语 - 连续导通模式(CCM)混合导通模式(MCM),数字控制,非连续导通模式(DCM),功率电子器件和功率因数校正(PFC)。
- 介绍
并网电压源脉宽调制(PWM)整流器具有电流中总谐波失真(THD)低的优点。 此外,它还可以提供可控功率因数(PF)[1]。 高功率密度三相交流/直流转换器的开发一直是电力电子领域的一个热门话题,这是由于电动汽车,飞机和航空航天等需要轻量化或小体积的应用日益增加的需求。 随着新兴的高频器件技术[2],在高电压和高功率条件下,转换器的工作频率可能会被推到数十kHz至数百kHz。
扩展的开关频率范围带来了进一步提高转换器功率密度的机会。
手稿于2011年4月6日收到; 2012年1月13日修订,3月13日,
2012年和2012年7月22日; 接受2012年9月24日。出版日期
2012年10月4日; 目前版本的日期为2012年11月22日。这项工作得到了国家自然科学基金(50907059)的支持。
L. Hang,M. Zhang和Z. Lu与浙江大学电气工程学院,杭州310027(电子邮件:ljhang@utk.edu; leejean.hang@gmail.com; eezmzju @ gmail. com; eeluzy@cee.zju.edu.cn)。
LM Tolbert是田纳西大学电气工程与计算机科学系,美国田纳西州诺克斯维尔37996-2250(电子邮件:tolbert@utk.edu)。
本白皮书中的一个或多个数字的彩色版本可在网上查阅http://ieeexplore.ieee.org。
数字对象标识符10.1109 / TIE.2012.2222851
非再生式三相整流器系列的特点是有源开关器件数量减少,功率因数高,电压应力低,这使其成为高功率密度的中等功率和高功率应用的理想拓扑。 维也纳整流器最初是从这些拓扑结构演化而来,与后者一起形成了一系列功能等效的电路拓扑[3],[4]。
维也纳拓扑结构的一个应用是为电信应用最大化三相电源的功率密度[5] - [8]。 由于半导体器件,磁性材料,电容器和冷却技术的发展,当功率密度成为设计目标时,维也纳整流器仍然是首要候选者之一[5,6,8]。 功率密度和重量减轻最重要的电动或混合动力汽车已成为这类整流器的潜在用户。 此外,维也纳整流器最近也被考虑用于工业电机驱动器[9] -[11]和UPS系统。 术语“维也纳型整流器”通常用于表示整个非再生式三相升压整流器系列。
首先,为了减小转换器的体积并增加功率密度,特别是在如前所述的一些应用中,输入滤波器的电感需要减小。 因此,非连续导通模式(DCM)周期将在每半个周期增加。 其次,由于高器件应力和传导发射问题,使用DCM工作的转换器仅限于低功率范围(小于250 W),因此用于较高功率范围的转换器通常设计用于连续导电模式(CCM)。 而DCM在降低负载时会出现接近线电压的交叉点[12],导致维也纳整流器在每半个周期内在CCM和DCM之间切换[此操作模式将命名为混合传导模式(MCM)] 。
尽管在转换器工作在MCM模式下时,体积可以减小,应用可以扩展,但转换器的控制和EMI问题会恶化,而且电感器的设计更加困难。 另外,数字控制系统中的错误采样和转换器动态过程中不同工作模式之间的切换都会导致输入电流的严重恶化[12],[13]。 在参考文献[14]中,应用了专用控制器,其中开关频率和控制器取决于用于DCM和CCM的整流器的负载
0278-0046/$31.00 copy; 2012 IEEE
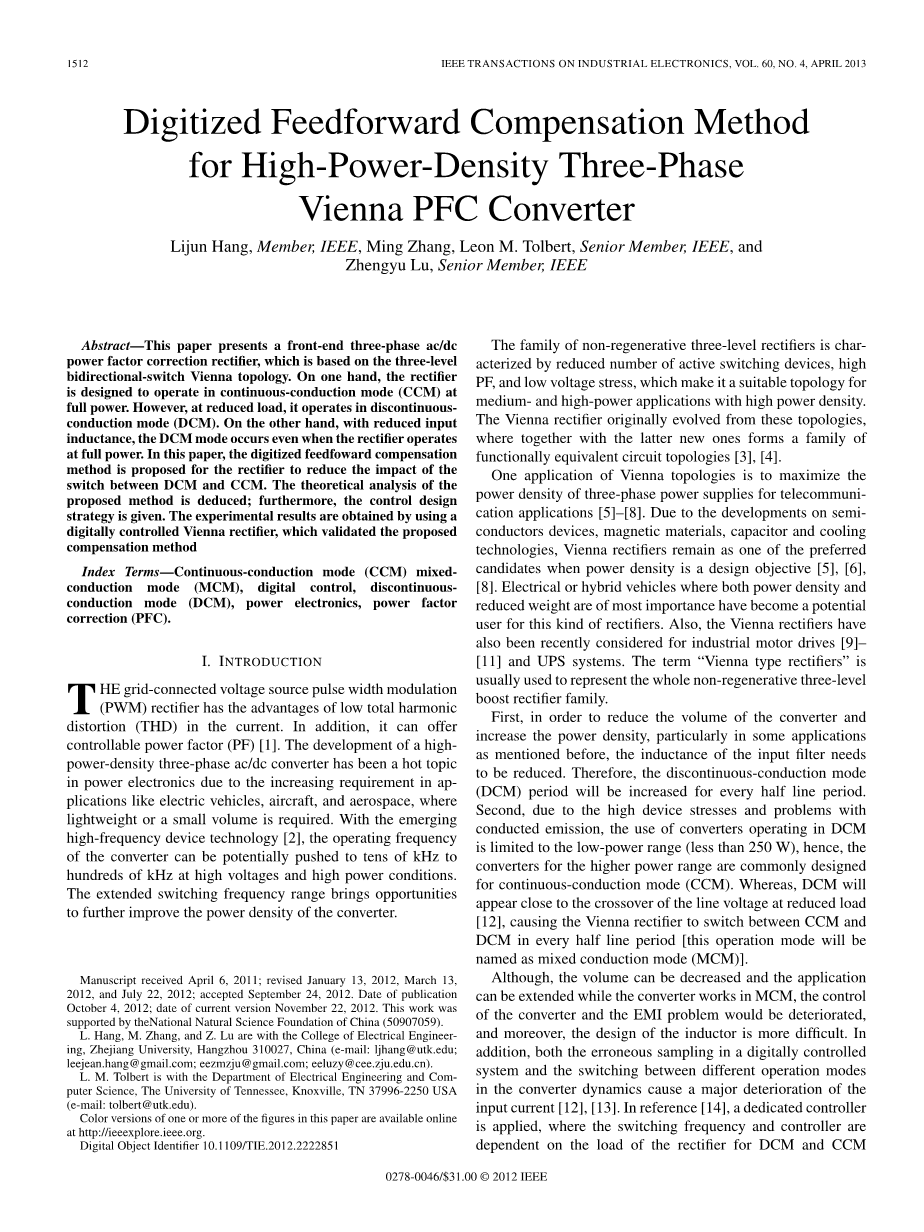
图1.非再生式三相四线双向开关维也纳整流器。
操作模式。 由于数字控制器的灵活性,降低的成本以及性能的提高,各种数字化控制策略得到了广泛的发展和报道[15] - [18]。 使用DSP控制器,即使发生快速负载变化[19],或者当低开关频率不合需要时,也可以实现整个功率范围内的固定开关频率。
本文提出了一种采用占空比前馈补偿方法来解决维也纳拓扑MCM问题的数字控制方法。 基于三相四线维氏拓扑的物理解耦,得到拓扑的等效简化单相数学模型; 因此,可以推导出用于转换器的数字SPWM控制方法。 通过采用所提出的控制器,可以降低输入电流的谐波失真,并且在DCM和MCM操作中增加PF。 当在电流环中应用占空比前馈时,整流器通过在两种模式中采用相同的较小参数在MCM中工作。 数字控制方法的效果通过实验验证。 为了验证所提出的控制器,建立了基于三相四线维也纳拓扑的5kW原型,其被设计为以MCM模式操作。 该控制器在DSP板上实现,实验结果表明了输入电流的优化性能。 报告了在不同功率水平下测试的输入电流的THD。 在较宽的功率范围内,PF值和THD都得到了改善。
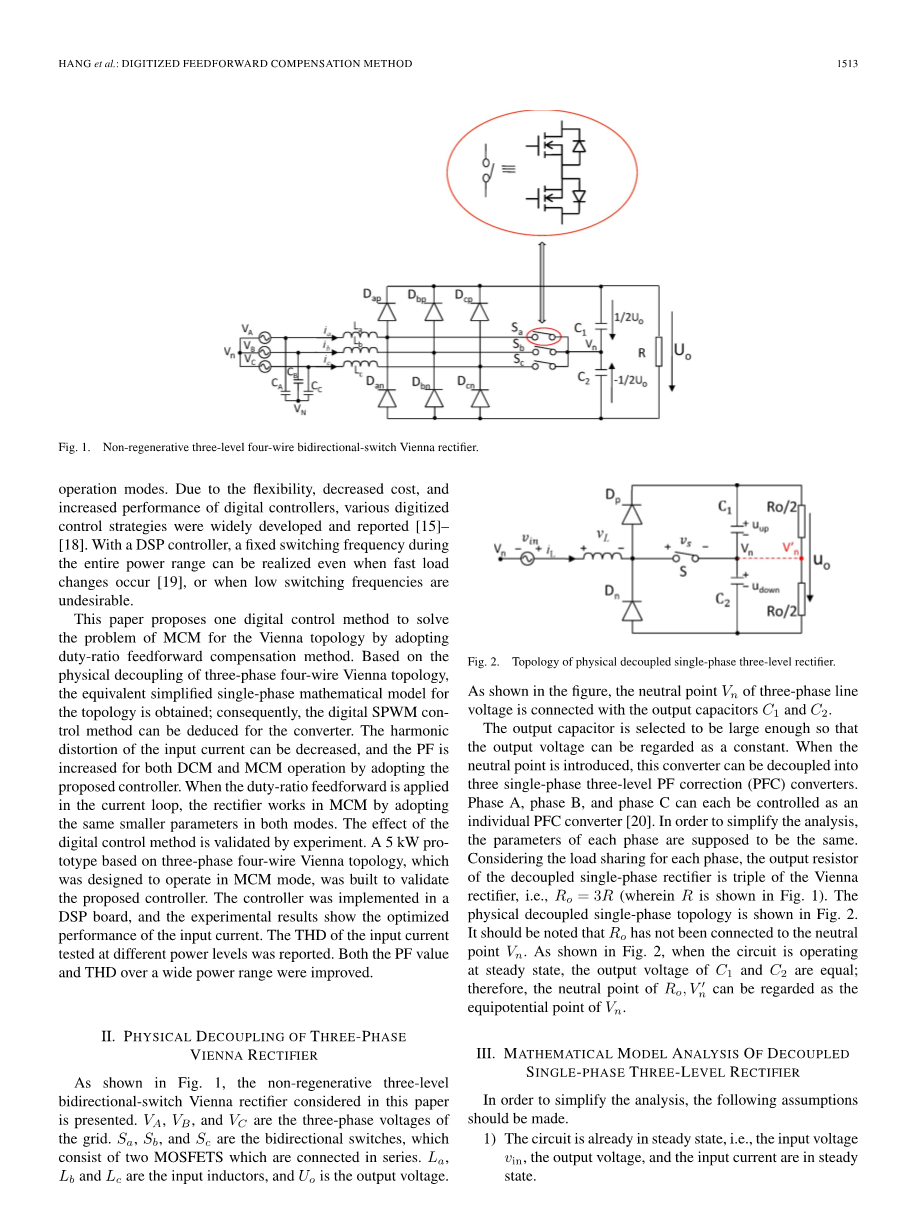
图2.物理解耦单相三相整流器拓扑。
如图所示,三相线电压的中性点V\与输出电容器C\和C\连接。
输出电容选择得足够大,以便输出电压可以看作是一个常数。 当引入中性点时,该转换器可以解耦成三个单相三相PF校正(PFC)转换器。 A相,B相和C相可以分别作为单个PFC转换器进行控制[20]。 为了简化分析,每个阶段的参数应该是相同的。 考虑到每相的负载分配,解耦单相整流器的输出电阻是维也纳整流器的三倍,即R\= 3R(其中R如图1所示)。 物理解耦单相拓扑如图2所示。应注意的是R\尚未连接到中性点V\。 如图2所示,当电路工作在稳态时,C\和C\的输出电压相等;因此,R\,VNT可以算是V的等电位点。
- 三相物理解耦
维也纳整流器
如图1所示,本文提出了非再生式三相双向开关维也纳整流器。 V\,V\和V\是电网的三相电压。 S\,S\和S\是双向开关,由两个串联的MOSFET组成。 L\,L\和L\是输入电感,U\是输出电压。
- 解耦控制的数学模型分析
单相三相整流器
为了简化分析,应该做出以下假设。
- 电路已处于稳定状态,即输入电压v\,输出电压和输入电流处于稳定状态。
- 由于输出电容较大,C1和C2的输出电压在每个开关周期内都是恒定的,即u向上= u下= u\/ 2。 在每个开关周期中,v\也可以被认为是恒定的。
- 所有的设备和线路都被视为理想的组件。
- CCM
通过使用平均状态模型,图2所示的电路在每个开关周期期间的状态函数可以如下获得:
图3.正半周期的DCM中的电感电流。
其中dCCM是CCM的占空比。 x是每个开关周期中变量x的平均值[21]。 当i\能够很好地跟踪v\时,正负半周期的函数是相同的,因此分析了半正周期函数。
通过对系统进行扰动和线性化,可以得到CCM的线性化交流小信号模型和静态工作函数
X表示有价值x的静态点,x是其静态工作点附近的扰动; 因此可推导出电感电流对占空比的传递函数
图4. CCM(实线)和DCM(点线)中电感 - 电流 - 占空比传递函数的波特图(幅度与频率响应)。
考虑到电感上施加的电压,可以得到每个开关周期的平均状态方程
- DCM
如果采用正态平均状态策略,则可以得到di\/ dt0。在该系统中,i\不能作为状态变量,只有一个状态变量,而降阶平均模型可以获得。 可推导出低频和直流的系统性能; 高频性能无法准确获得。因此,应使用全阶平均模型进行分析。
其中dDCM是DCM的占空比,T是开关周期。 说明了正半周期,这与CCM中的相同。 通过扰动和线性化系统,可以获得交流小信号模型和静态工作点。
假定d\和d\是占空比,
租金我\分别增加和减少。 在正半周期间,每个开关周期的电感电流可以如图3所示。因此,可以获得平均电感电流
因此,也可以获得电感电流与占空比的传递函数
因此,可以获得d\与d\之间的以下等式
- CCM模型与DCM模型的比较
考虑到(3),(9)和静态工作点,单相输出功率设置为1667 W(另一个
图5.三相四线三相维也纳整流器各相的典型控制方案。
电路参数在第五节的实验描述中给出。 CCM和DCM的电感电流与占空比的波特图如图4所示.CCM的增益远远大于低频段的DCM增益,而在高频段,CCM的增益与DCM几乎相同。 另外,当输入电压V\增加时,DCM的增益增加; 因此,当整流器工作在DCM时,电路的增益在整个线路周期内是随时间变化的。 如图4所示,在DCM和CCM之间的切换期间,增益突然改变。
- 前馈补偿和
其设计分析
-
- 传统的PFC控制器
三相四线维也纳整流器每相的控制器可以如图5所示。该拓扑可以看作是双重升压。 其中,电压控制器分为电压回路和电流回路两部分。 前一个环路控制C1和C2的输出电压,这与单个升压PFC控制器不同,后一个环路控制电感电流以跟踪输入电压。 由于三相的对称性,电压控制器可以为三个电流控制器共享。
电流控制器在图5中以虚线框显示。当电路仅以CCM或DCM工作时,可以控制正弦特性和输入电流的相位,并且电流可以通过调整控制器参数很好地跟踪输入电压。 然而,当转换器工作在MCM模式时,通过使用这个电流控制器不能保证输入电流的质量,因为在低频操作期间DCM的增益比CCM的增益小得多,如第三节所示。 在DCM和CCM之间切换期间,增益突然改变。 DCM的控制器增益应该大于CCM的控制器增益,以便在两种模式下可以确保相同的开环增益。 传统的控制器只能适应两种模式之一。 当...的时候
图6.单相拓扑的平均模型和矢量。
由于控制器增益小于要求的增益而恶化。 当专用于DCM的控制器以CCM工作时,会发生输入电流的谐振。 此外,由于增益太大而引入不稳定性。 本文针对维也纳整流器提出了一种数字占空比前馈策略。 与变频控制器相比,这种方法更加灵活。 MCM输入电流的性能可以大大提高,THDi可以降低。
-
- 占空比前馈控制的理论分析
- MCM的占空比前馈
输入电压由v =\V给出 sin(omega;t),
如上所述,图2所示的非线性单相整流器可以基于平均态理论线性化; 因此,开关周期的平均状态模型如图6(a)所示。 v\是开关S的开关周期的平
全文共14346字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16727],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

