
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
美国地震学会公报,第99卷,第2A号,第681 - 693页,2009年4月,doi: 10.1785 / 0120080264
采用谱元法和激光雷达DTM运动在台湾阳明山地区的基础上真实地表地形对地震地面的影响
由Shiann-Jong Lee, yuchang Chan, dmitri Komatitsch,* borshouh Huang,和耶罗恩Tromp提供
摘要将光探测与激光测距(LiDAR)数字地形模型相结合(DTM)数据和改进的网格实现,基于谱元法研究高分辨率地表地形对地震地面运动的影响。一般来说,一般来说,山顶和山脊地形增加了地震的振幅,而山谷通常减少了地面运动在过去的地震记录和数值模拟中都观察到。然而,在数值模拟中得到了明显的特征真实地形对地面运动的影响并不常见,特别是地震反应。在此,我们使用激光雷达DTM数据,在自由表面提供2米分辨率,并采用频谱元方法来模拟三维(3)地震波在台湾杨民山地区的传播真实地形的效果。下面是一张平滑的地形图,为了减少由于地面陡峭而引起的网格畸变,对模型曲面进行了处理。数值模拟表明,山区地震受地形和震源频率含量的影响的震害较强。地面放大运动主要发生在山顶和山脊,而山谷和平顶丘陵地区的地面震动程度较低。小尺度地形特征与高频表面波之间的相互作用可以产生异常强烈的相互震动作用。研究结果表明,地形变化对山地峰值加速度(PGA)值的影响可达50%,而PGA值的相对变化较大与平坦的表面相比,山谷与山脊之间响应的距离可高达2倍。这表明高分辨率、真实的地形特征应该是在地震危险性分析中考虑,特别是对人口密集的山区。
介绍
长期以来,人们都知道地表地形对地震地面运动有很大的影响。一些数值研究表明,结构位于顶部的山丘、山脊和峡谷遭受的破坏比位于山脚下的建筑物(Boore et al., 1972,1981;Geli等,1988;Scott等,1997;(Ma et al., 2007)在过去的地震中,如1986年花莲地震(Chiu等, 1989年洛玛普列塔地震(Hartzell等,1994年),1999年集集地震(黄,2000)。
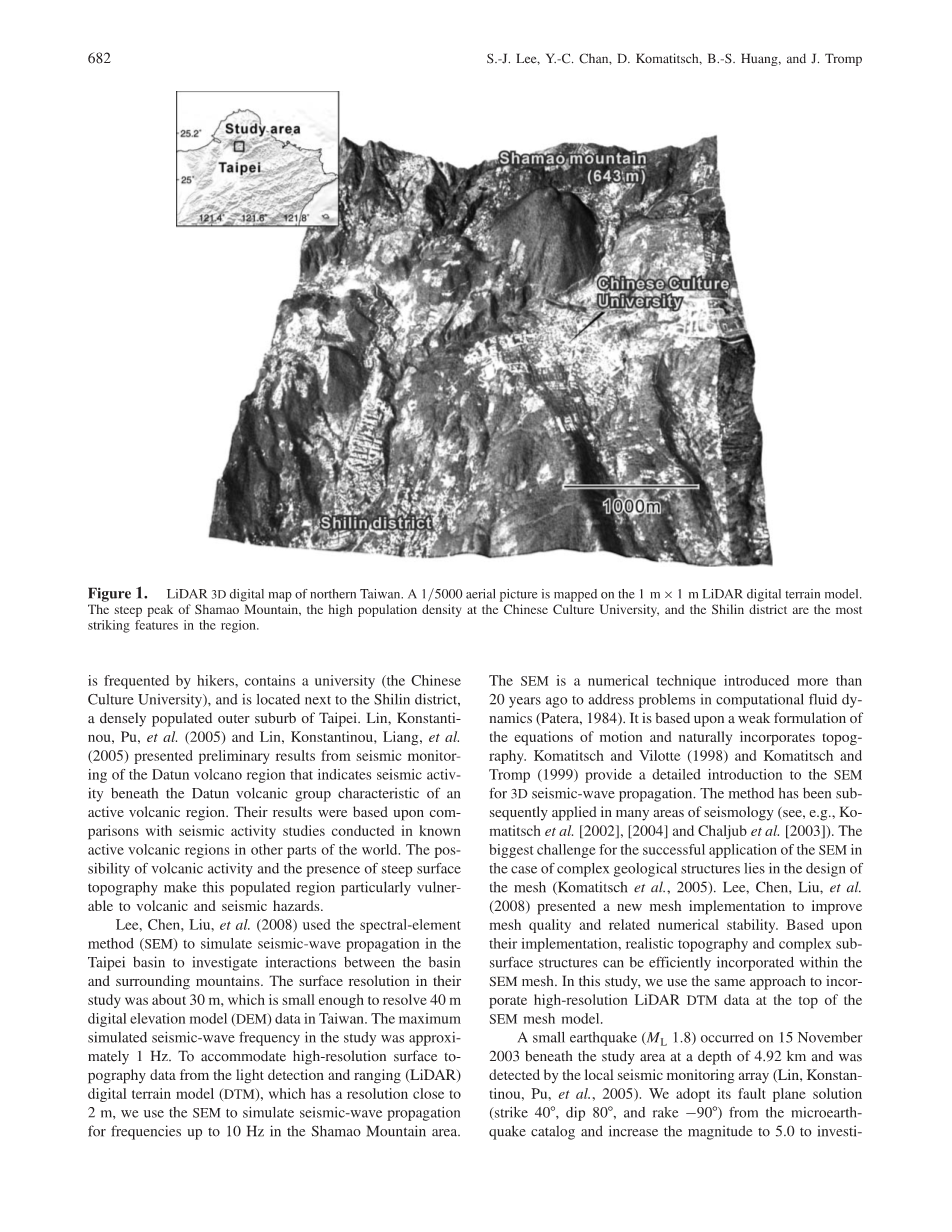
在本研究中,我们重点研究了表面形貌的影响沙茂山区(图1),位于台湾北部阳明山国家公园。该公园是以一系列火山为特征,命名为大屯火山群。这个地区是一个主要的户外娱乐区,它是台北市的市民,也是台北市人口密集的郊区。沙茂山,寄生大屯火山群的火山,是一座圆锥形火山由熔岩沉积物和在此期间喷发喷出的聚集岩石形成。其中,沙茅山的山峰最为险峻是这座锥形火山的显著特征。它是一个圆形的火山圆顶,看起来有点像一顶黑色的纱帽。该地区是远足者常去的地方,包括一所中文大学,并毗邻石林区,台北市人口稠密的郊区。林,康斯坦丁努,普,等。(2005)和林,康斯坦丁努,梁,等。(2005)给出了大屯火山地区地震监测的初步结果,表明大屯火山群特征下的地震活动具有一定的规律性活跃的火山地区。他们的结果是基于与已知地震活动研究世界其他地区的活火山地区的比较。火山活动的可能性和陡峭地表地形的存在使这个人口密集的地区特别容易受到火山和地震的危害。
图1所示。台湾北部激光雷达三维数位地图。在1 mtimes;1 m激光雷达数字地形模型上绘制1=5000航拍图。其中,该地区的显著特征,沙茂山山峰险峻,中国文化大学人口密度高。
Lee, Chen, Liu,等(2008)使用了光谱元素方法采用扫描电镜(SEM)模拟地震波的传播台北盆地间和周围的山脉的相互作用研。台湾数位高程模型资料的表面分辨率研究范围约为30米,小到足以解决40米。的最大研究中模拟的地震波频率约为1hz。以配合来自光探测及测距(激光雷达)的高分辨率地表形貌数据数字地形模型(DTM),其分辨率接近利用扫描电镜(SEM)对地震波的传播过程进行了模拟适用于沙茂山区高达10赫兹的频率。扫描电镜是一种20年前解决计算流体动力学问题(Patera, 1984)被广泛应用的数值分析技术。它是基于一个弱的公式运动方程和自然结合的地形。Komatitsch and Vilotte(1998)和Komatitsch 和Tromp(1999)对SEM做了详细的介绍用于三维地震波传播。该方法随后被应用于地震学的许多领域(如Komatitsch等[2002],[2004]和Chaljub等[2003])。扫描电镜的成功应用面临的最大挑战在于复杂地质构造的实例网格(Komatitsch et al., 2005)。李,陈,刘,等。(2008)提出了一种新的网格实现来改进网格质量及相关数值稳定性。基于它们的实现,现实的地形和复杂的地下结构可以有效地纳入SEM网。在本研究中,我们使用相同的方法将高分辨率激光雷达DTM数据合并到顶部SEM网格模型。2003年11月15日在研究区域下方发生了一次小地震(ML 1.8),深度为4.92公里。由局部地震监测阵列检测(Lin, Konstantinou, Pu, et al., 2005)。我们采用它的故障平面解法(strike 40°,dip 80°,rake 90°)从微地震目录中删除,并将震级提高到5.0,以研究真实地表存在时的地震响应地形的情况下,未来可能研究更大的事件。
激光雷达DTM数据和扫描电镜网格
真实地表形貌
激光雷达DTM数据
机载激光雷达(Wehr和Lohr, 1999)系统包括三种技术的集成,即:惯性导航系统(INS),激光和全球定位系统(GPS)。该系统安装在飞机上。在飞行过程中,激光雷达传感器向地球发射窄高频激光束;有些光是反射和散射回激光雷达系统。光变化的性质有助于确定地球表面的性质(Chan et al., 2007)。台北大都市区激光雷达测绘项目正在进行中。它将大大整个台北地区的立面造型数字图像的分辨率。相比对台湾DEM的40米分辨率,采用激光雷达DTM可以提供1米分辨率(图2)。为了研究具有如此高分辨率地表形貌的地震反应,我们主要集中在沙茂山区(约4000times;)2006年完成激光雷达DTM测量(Chan et al., 2005)。
图2。各地形图数据集对比图:(a) 1=5000航拍地形图,(b) 40m数字高程模型(d) 1 mtimes;1 m激光雷达数字地面模型(DSM)无植被的地形模型(DTM)。
S . - j .格李,Y . c。陈,D. Komatitsch, B. s。黄,J. Tromp
图3。研究体的光谱单元网格。模型水平尺寸为4247 mtimes;3941 m,665 m至10000m;垂直高度000米(图中为665米至4000米)。三维P波速度变化用灰色比例。沙茂山位于研究区中部,地形险峻。右边的面板交叉显示了由两组不同的地表数据集生成的沙茅山剖面:(a)包含1 m激光雷达DTM的地表地形;(b)包含40 m DEM的地表地形。这两个模型顶点之间的平均距离都是大约2米。在模型(a)中可以观察到详细的地形特征,而模型(b)则显示出地面更为平滑的地形特征。
高分辨率Spectral-Element网格
与激光雷达DTM相结合
沙茂山区的扫描电镜(SEM)图如图3所示。整个模型约为4247 mtimes;3941 mtimes;
10665米。研究区域的沙茂山位于东北地区。我们保留了模型顶部激光雷达DTM数据的大部分表面特征,表面分辨率约为2米。从走时层析成像研究中获得嵌在网格中的三维波速模型(Kim et al., 2005)。该模型的分辨率为水平方向8公里,深度2公里,其中提供研究区域的背景三维波速。海平面以上体积的波速由
扩展定义在z0 m处的曲面值。为了在模拟中包括真实的地形,一个薄的缓冲区
层是用来抑制网格畸变的表面(李、陈、刘、等。 2008)。此外,我们还将介绍
三倍网格层,以适应更细的网格近表面(Komatitsch和Tromp, 1999)。基于
这种方法,采用激光雷达DTM数据获得了高分辨率的地形,无需人工平滑。两个特写视图,比较激光雷达DTM和40 m DEM网格如图3a,b所示。沙茂山,连同其他表面特征,包括细节山脊和山谷,可以清晰地辨认出来激光雷达DTM网格(图3a),但没有在40 m DEM网格(图3 b)。因为缺乏地震方面的资料,我们在研究区使用500 Qmu;剪切质量因素,即基岩中所使用的值通过李,陈,刘,等(2008)。
仿真结果
我们使用SPECFEM3D软件包开发通过Komatitsch等(2004)对研究区域进行分解,为基于消息传递接口(MPI) (Gropp)的并行计算提供224个网格片(224个处理器等., 1996)。高斯-之间的平均距离的表面上的lobatto -勒让德积分点
模型约为2米,即小到足以求解激光雷达DTM数据的最大频率约为10赫兹。为了模拟该地区发生的假定地震,在该地区设置了一个双耦合点源深度为4.92 km,具有高斯源时间函数半持续时间为0.05秒,位于模型中心附近。光谱元素的总数和模型中的高斯-洛巴特-勒让德积分点为372万人,24807万人。时代步伐
为0.0001秒,仿真总持续时间为5秒,即50,000个时间步长。这些模拟需要
164.5 gb内存和平均挂钟时间是23小时。
波场的快照
北(北)、东(东)及垂直(Z)的快照速度波场的分量如图4所示。P波到达表面时相对较弱振幅约为1.2秒。起伏的地形反射和散射地震能量,导致该地区复杂的波前。这一点在2.15秒,当大量反射和散射时能量在S波到达地表后出现,特别是沿着山脊和山谷。当S波经过波阵面时,通过蔡甸山它也有明显的畸变。2.25秒后,主体波相位已通过研究区大部分区域传播;然而,该地区仍持续摇晃了几秒钟。注意,沙茅山的地震能量陷阱,并继续混响。在很短的一段时间内,山是集中地震动的沙茂,特别是在两上水平分量。这表明整座山的回声周期约为0.1秒。
接下来,我们决议考虑了三种模型来研究地形对不同地表运动的影响。这三种模型是(a)平面与a三维背景波速模型,(b)地表40m DEM,三维波速模型,(c)地表DTM激光雷达表面与三维背景波速度模型。快照给出了地震波场的北分量
在图5中。很明显,平面模型在地震波经过时没有出现任何畸变的地震波前通过。40米DEM和激光雷达DTM均为模型显示更复杂的波传播模式,山中复杂的反射和散射。然而,基于激光雷达DTM模型的仿真包含这些复杂波前的更多细节;反射波和散射波的振幅较大而不是40米DEM模型。
图4波场的三个组成部分的快照,用于模拟位于研究区深度4.92 km: (a)东向分量,(b)北向分量,(c)垂直分量。暖色表示正值冷色表示负值。波阵面明显扭曲。它们被陡峭的地形反射和分散,尤其是水平分量。
峰值地震动分布
我们比较了峰值地面加速度(PGA)地图与对应的地表地形特征出现在图6a、b分别为激光雷达DTM和40m DEM。PGA值是根据这三个的范数计算的加速度矢量的分量。再次,基于激光雷达模型的结果显示出更高的分辨率和更强的峰值地面加速度模式。因为我们使用双耦合源,辐射随方位角变化。在这种情况下,无论是源辐射还是表面形貌主导地表PGA分布。一般情况下,较大的PGA值都位于靠近中心的位置的研究区,以东北-西南表达。然而,一个复杂的较大峰顶的PGA分布被观察到与山谷和小溪附近的PGA值较弱。在海拔较低的地区,如石林(图6中的第三个位置),位于山脚下也会出现较大的PGA值。另一个有趣的PGA区域位于沙茂山(图6第I位),PGA值在哪里显示以辐射山顶为中心的模式。中国文化的校园大学(图6中的遗址2)也显示了较大的PGA值,因为该位置靠近震中。
图5。三种模型的波场北分量快照:(a)平面三维波速模型,
(b)具有40 m DEM地形的三维波速模型,(c)包含激光雷达DTM的三维波速模型。温暖的颜色指示正值和冷色表示负值。双偶源的中心由一颗恒星表示。
图6。(a)激光雷达DTM与(b) 40 m DEM的峰值加速度(PGA)比较。模拟的PGA值为使用加速度矢量的范数计算,并使用图右侧所示的颜色比例绘制。每个模拟中包含的地形数据作为背景。三处遗址均有标示:沙茂山(遗址一)、中国文化大学位于山顶(遗址二),石林区位于山脚下(遗址三)。
波形比较
研究了地形对模拟结果的影响地面运动在两个决议:一个基于40米DEM和另一种基于2 m激光雷达DTM。由平面模型得到的合成波形也用于比较。样品合成波形
在5个不同位置上速度的垂直分量如图7所示。第一次到达(P波)几乎在这三个模型中都是一样的,从另外两个模型来看除了旅行时间由平面模型确定的结果略有不同,而振幅的后期阶段明显不同。在沙茂山顶(遗址一),几个大振幅后期相在S波。这些阶段与混响的发生有关在山顶,如前面的快照所示分析。在一个山顶(遗址2),有几个强大的稍后相的振幅比S波大得多;它们在平面合成地震记录中没有被观测到。山坡(遗址三)显示了类似的结果。的遗址4和5,位于山脚下和山谷中,总体上以S波和后期相为主波形。较晚到达的强流在4号遗址是复杂的,这可能是由于主波之间的建设性和破坏性干涉。值得注意的是遗址5、位于山谷中,振幅峰值在平坦模型中与两种模型相比,具有较大的表面形貌。在一般情况下,在模拟的基础上,后期阶段在山区表现出明显较大的振幅激光雷达DTM模型。
图7。激光雷达DTM、40m DEM与五个不同位置的平面合成波形比较。我们画出了垂线速度矢量的分量,带通滤波在0.1到10hz之间。灰色线显示激光雷达DTM合成地震图,虚线表示40 m DEM合成地震图,黑线表示平面合成地震图。峰值速度测定图的右侧显示了这三个模型。
讨论
从我们的场景地震模拟结果,我们确定了地形对地面运动影响的主要特征:更复杂的波传播和更复杂的PGA分布模式。为了进一步研究真实地形的影响,我们减去了PGA值为模型无地形由值为用地形模型,将结果除以PGA值为模型无地形,并通过将其相乘100得到一个百分比。获取的值被调用P
全文共11564字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[453469],资料为PDF文档或Word文档,PDF文档可免费转换为Word

