英语原文共 104 页,剩余内容已隐藏,支付完成后下载完整资料
周期激励下的单自由度系统
5.1引言5.2对谐波激励的响应5.5.1激励适用于T 0 5.2.2励磁所有时间5.2.3无阻尼系统和谐振的响应5.2.4幅值和相位信息5.3频率响应函数5.3.1引言5.3.2曲线拟合和参数ESTime5.3.3对系统参数和滤波特性的敏感性5.3.4.频率响应函数与传递函数的关系5.3.5频率响应函数5.4种形式的旋转不平衡质量5.5系统与基础激励5.6测量:加速度计5.7隔振5.8能量耗散和等效阻尼5.9对谐波分量激励的响应5.10非线性刚度对强迫响应的影响5.11总结练习
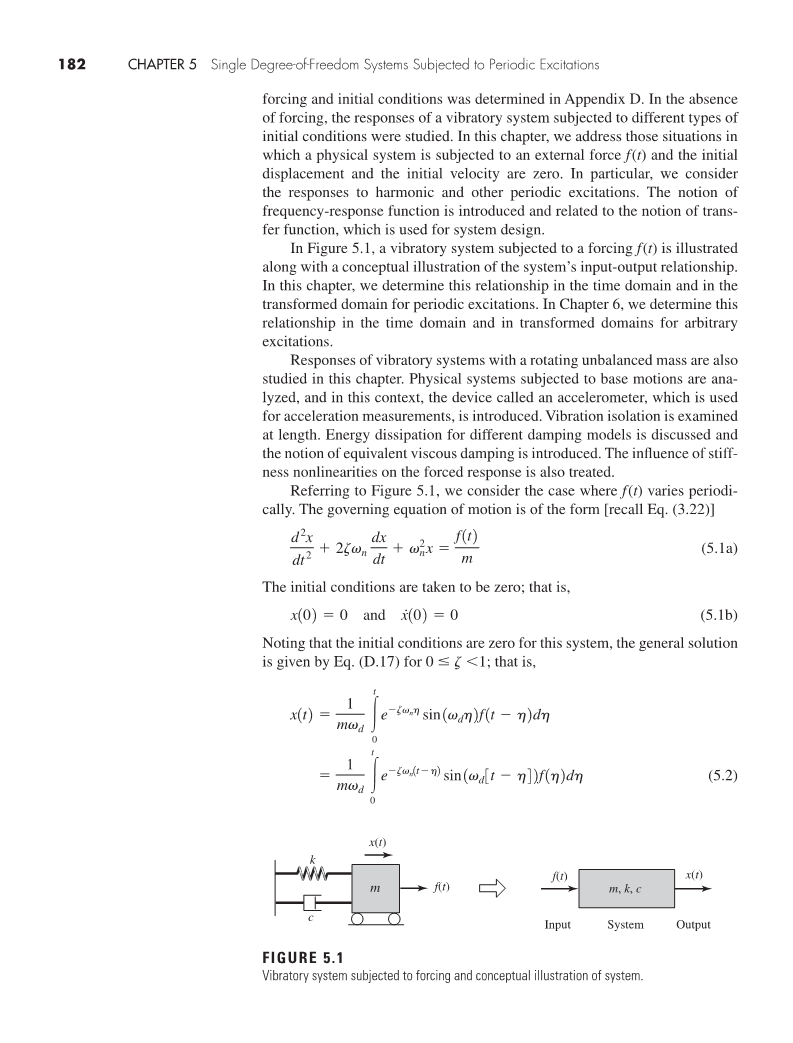
1引言 在第3章中,导出了单自由度系统的控制方程。从这个方程出发,对系统进行了求解。 在附录D中确定了强迫和初始条件,在没有强迫的情况下,研究了振动系统在不同类型初始条件下的响应。在这一章中,我们讨论了物理系统受到外力F(t)和初始位移和初始速度为零的情况。特别地,我们考虑对谐波和其他周期激励的响应。介绍了频率响应函数的概念,并将其与传递函数的概念联系起来,用于系统设计。在图5.1中,示出了受强迫F(t)的振动系统以及系统输入输出关系的概念性说明。在这一章中,我们确定了这种关系在时域和变换域中的周期性激发。在第6章中,我们确定了在任意激励下时域和变换域中的这种关系。本章还研究了具有旋转不平衡质量的振动系统的响应。对基本运动的物理系统进行了分析,在此基础上介绍了一种用于加速度测量的称为加速度计的装置。隔振时间长。讨论了不同阻尼模型的能量耗散问题,引入了等效粘性阻尼的概念。同时还研究了刚度非线性对强迫响应的影响。参考图5.1,我们考虑F(t)周期性变化的情况。运动的控制方程是形式[回忆方程(3.22)]。
初始条件取零,也就是说,
注意到该系统的初始条件为零,一般解由Eq.(D.17)给出,用于0 z 1;即,
图5.1振动系统受强迫和系统的概念说明。
其中H是积分1的变量,其次,考虑了线性振动系统在谐波激励下的响应。首先,研究了在时间t 0激励时的响应,然后研究激励在所有时刻存在时的响应。在这一章中,我们将展示如何:分析单自由度系统对各种持续时间的谐波激励的响应。确定单自由度系统的频率响应和相位响应。解释单个自由度系统对激励频率小于、等于、大于系统固有频率的响应。从测量的频率响应确定系统参数。分析旋转不平衡和基座激励下单自由度系统的响应。使用加速度计测量单自由度系统的响应。隔离单自由度系统的振动。分析单自由度系统对多谐频率分量激励的响应。确定能量耗散和等效阻尼。
5.2响应谐波激励
5.2.1激励从T0在本节中,考虑正弦谐波和余弦谐波激励的响应。将表明,虽然初始条件为零,但是在T 0突然施加激励的事实导致由瞬态部分和稳态部分组成的响应。这些瞬变是典型的情况下,电动机启动或激励间歇地打开和关闭。在没有阻尼的情况下,振动系统的响应不能被表征为具有瞬态部分和稳态部分。
例1:正弦谐波激励,我们考虑周期强迫函数
写Eqs。(5.2)采用卷积积分的以下性质:
第5章受周期激励的单自由度系统
其中u(t)是单位阶跃函数2
此外,我们引入无量纲时间t VNT并重写EQ(5.5)AS。
在无量纲激励频率V/VN,积分J维VNH的无量纲时间变量中,我们使用了Eq.(4.5)给出的VD的定义。注意,当激励频率处于固有频率时,即V VN或1。执行整合后的强制响应的解决方案,3等式(5.6)导致
其中响应的稳态部分由
响应的瞬态部分由
2-单位阶跃函数被用作一个简明形式,我们可以用简单的形式表达一个函数,如方程(5.3),它仅在一个特殊的C区间内是非零的。如果不使用单位阶跃函数,等式(5.3)将被写为
3使用符号工具箱中的MATLAB函数INT。
经过很长一段时间,这意味着经过许多周期的强迫,响应减少到
在Eqs。(5.8a),量h()被称为振幅响应,而量u()被称为相位响应,它提供相对于强迫f(t)的相位。我们看到稳态部分在无量纲频率、施加力f(t)的频率和振幅fH()/k周期性地变化,此外,相对于输入,位移响应被延迟了量u()。振幅响应H()和相位响应u()在图5.2中绘出了Z的几个值。我们将在第5.3节中讨论这些量的意义。瞬态响应XSTRANS(T)随频率VD/VN周期性地变化,并且其振幅随阻尼比Z的函数随时间呈指数递减。此外,响应相对于输入而被移位了量u()。在实际应用中,瞬态响应的持续时间,我们认为系统的持续时间TD超出了系统的稳定状态。
图5.2直接应用于系统质量的谐波激励:(a)振幅响应和(b)相位响应。
为了获得这个持续时间的估计值,让瞬态衰减的包络在无维时间Td上的值D,这是由关系给出的。
也就是说,当位移的瞬态部分的振幅远小于位移的稳态部分的振幅时,瞬态被称为“熄灭”,并且只有响应的稳态部分保持。求解无维时间TD
我们也可以表示与维时间Td对应的无量纲时间Td,它在标准化位移X(t)/(FoH(/k))衰减到D的激励频率V上的周期Nd的数量上,因为激发TV 2p/v的周期,然后周期TD。NDTV 2PND/V,以及
在表5.1中提供了从等式(5.11)获得的Nd的一些典型值。从这个表中注意到,对于给定的阻尼因子Z,瞬态持续的周期数随着激励频率的增加而增加。正如预期的那样,对于给定的激励频率,响应的瞬态部分的持续时间随着阻尼因子的增加而减小。 对于正弦谐波激励的代表性系统响应,图5.3所示的三组图给出了三个值的归一化位移响应x(t)/(f/k)de NED,并且在每一个值上,得到了三个不同的z值的响应。图5.3A所示对应于小于固有频率的激励频率:1。图5.3b所示的第二组对应于等于固有频率的激励频率:1。图5.3c所示的第三组对应于
图5.3当瞬态包络参数D 0.02和z(a)0.2和(b)1的不同值时,系统对突然施加的正弦波强迫函数的归一化响应
大于固有频率的激励频率:
1。对于这九个值组合中的每一个,给出了h()和Nd的值。随着T的增加,瞬态部分熄灭,位移响应的振幅接近大小H()(稳态值)。在ND周期后,响应幅度在2%(D 0.02)以内,或者相当于T TD时的响应大小。注意,当1或 1,系统响应衰减到 DOF的稳态值。当1,位移响应增加,直到它到达内。 它的稳态值d。此外,在瞬态部分明显的响应的部分期间,响应不是周期性的。然而,当TD已经过去时,每个响应周期性地与由激励频率确定的周期有关,即,TV 2P/V。 案例2:余弦谐波激励的完备性,考虑周期强迫函数
在将等式(5.12)代入等式(5.2)之后,结果是
其中无量纲频率和积分J的变量与情形1是一样的。 在Eq.(5.13)中进行强迫响应的积分求解,得到位移响应。
其中响应的稳态部分由
响应的瞬态部分由
在Eqs。(5.14)和(5.15),振幅响应H()和相位u()由Eqs给出。(5.8a),并且注意到必须确定适当的象限来确定UCT*()。同样,在正弦谐波激励的情况下,经过长时间(许多周期的强迫),响应趋于稳定状态;即,
Eq.(5.14)给出的位移响应在图5.4中绘制为三个值,并且在每一个值上,对于Z的三个不同的值确定响应。对于这九个值组合中的每一个,给出了H()和Nd的值。在正弦谐波激励的情况下,瞬态在九个时间历程中的每一个都最初是非周期性的,然后在系统稳定下来之后响应变成周期性的。虽然瞬态响应的形状不同于正弦波强迫函数的形状,但瞬变消去所需的时间与相应的情况相同。
4使用符号工具箱中的Matlab函数int。
图5.4当瞬态包络参数D 0.02和z(a)0.2和(b)1的不同值时,系统对突然施加的余弦波强迫函数的响应。
实例5.1系统阻尼比的估计以适应瞬态响应
具有66.4 rad/s固有频率的单自由度系统被间歇地循环开和关。当它打开时,它以5.8赫兹的频率振动。当施加强迫时,阻尼比是为了使系统在150 ms内衰减到其稳态振幅的5%以内?假设系统在强制循环之间从静止状态下沉到静止状态,从Eq.(5.10b),当强制开启时,它是适用的。
数值求解5,得到Z 0.244。
5利用MATLAB函数F0。
示例5.2:一个非常支持的旋转机器的启动响应
当旋转机器从静止开始时,旋转速度通常线性增加,直到达到T的运行速度Vs。然后,从图5.5中,我们可以看到,机器的激励频率可以表示为(a),然后,对于图5.6所示的系统,对系统惯性元件的强制力是: (b) 或 (c)其中S V/VN是机器的旋转速度与系统固有频率之比,T VNT,以及VNTO 2Pto/Tn与达到操作速度所需时间之比成系统的无阻尼自由振荡周期的比例。然后,图5.6所示的系统由等式(3.23)来控制,这是 (d) 当过点表示相对于无量纲时间t的导数时,由于正弦函数的形式的形式,这个方程必须为x(t)/(f/k)数值求解。结果如图5.7所示,对于Z 0.1和S 0.25、1和2的所有组合,以及/2p 0.25、1.0、2.0。在S的每个值,相应的稳态响应由Eqs给出。(5.17)和(5.18),即H(S)和U(S)。如图5.3所示,图5.7所示的结果在初始阶段之后具有瞬态特性,接着是稳态阶段。当激励频率的值低于固有频率时,稳态振幅与瞬态运动的最大振幅相差不大。然而,当激励频率的固有值等于固有频率时,从瞬态运动到稳态运动的积累是明显的。当激励频率的值高于激励频率时,可以看出瞬变衰减到稳态运动。5.2.2在前一段中的所有时间都存在激励,结果表明,对于在时间t 0开始的谐波周期激励,振动系统的响应由A
图5.7单自由度系统对频率从零上升到无量纲频率S的激励的响应。
过渡部分和稳态部分。在无量纲时间TD之后,仅响应的稳态部分仍然存在。利用这种观测来描述线性系统在频率响应函数和传递函数方面的特征。一旦从谐振强迫确定线性振动系统的频率响应函数,该频率响应函数可用于确定线性振动系统对谐波输入的任何组合的响应。为了在这个方向上进行,RST,重新确定了在5.2.1节中找到的响应的稳态部分的先前确定的结果。当周期强迫由f(t)fin正弦(vt)给出时
或者等价地,就无量纲时间变量T而言,AS
也就是说,谐波激励存在于所有时间,响应的相关稳定状态部分由Eqs给出。(5.8)和(5.9)。因此
稳态速度和稳态加速度分别由
我们看到,对于谐波振荡,加速度的大小等于激励频率的平方,位移幅值和加速度响应与位移响应相差180°。速度的大小等于激励频率乘以位移的大小,速度响应与位移响应相差90°。
实例5.3阻尼系统的强迫响应
考虑图5.8A所示的电动机,电动机的输出端连接两个轴,两个轴的两端是固定的。电动机提供沿单位矢量k的方向的谐波驱动转矩。该转矩的幅值为100mu;m,驱动频率V为475弧度/s。电机Jo的转动惯量为0.020千克m2,轴的扭转刚度为kt1 2500 nm/rad。和KT2 3000 N m/RAD,以及转子所经历的总阻尼可以是
用扭振阻尼器对阻尼系数Co 1.25 N m S/RAD进行定量。我们将确定稳态响应的形式和稳态响应的振幅和相位。基于角动量平衡原理推导了电机的控制方程。考虑图5.8b所示的自由体图,其中包括惯性矩。施加在电机中心的角动量原理导致下列控制方程。
用旋转惯量Jo将Eq.(a)分解,得到如下方程,其形式类似于方程(5.1)。
其中,系统固有频率和阻尼因子分别由
基于等式(5.17),给出了稳态运动方程(b)的解。
因此,在eqs from the values提供。(和)的稳态响应,
因此,在475 rad/s的频率下,谐波稳态运动的幅值为0.09弧度,相对于激励的相位滞后为0.57弧度。
5.2.3无阻尼系统的响应和共振
当线性振动系统没有阻尼时,Z 0,由Eq.(5.1)给出的控制方程减小到 (5.20) 当V VN(1)对由Eq.(5.3)给出的激励时的响应,并且对于零初始条件,响应由EQS确定。(5.7)和(5.8)Z 0。因此,我们获得 (5.21a) 或者,等价地, 当激励频率与固有频率不同时,即当1(或V VN)时有效。从情商的形式来看,这是显而易见的。(5.21)对于在不等于固有频率的频率下由正弦强迫激励的无阻尼系统,该响应由激
全文共6996字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11964],资料为PDF文档或Word文档,PDF文档可免费转换为Word

