
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
对于恒功率负载的负输入阻抗补偿器
摘要-为了使具有恒功率负载特性的无刷直流电机驱动系统稳定,本文设计了一种负输入阻抗补偿器。该策略是将直流母线电压的变化反馈到电流控制环路中,修改系统在中频区域的输入阻抗,从而抑制输入滤波器。文中讨论了补偿器的设计过程以及参数的选择。研究补偿器对电机控制器性能的影响,最后,通过仿真和实验测试验证了控制器的有效性。
关键词-无刷直流电机驱动,负输入阻抗不稳定性
符号说明
Csrc 输入滤波器的电容
D 逆变器的占空比
Gc(s) 电流控制器的传递函数
H 电机惯性常数
a 平均电机电枢电流
dc 输入滤波器后的直流侧平均电流.
Iref 速度控制器的电流参考值
Kc 电流控制器的增益
Kfb 电流反馈常数
Kf 负输入阻抗补偿器增益
La 电机电感
Lsrc 输入滤波器的电感
M1(s)、M2(s) 电机传递函数
N(s) 负输入阻抗补偿器传递函数
Ra 电机阻抗
T 负载转矩
te,tm 电机的电力和机械时间常数
a 电机电枢平均输入电压
Vdc 输入滤波器直流侧电压
omega;c N(s)的截止频率
omega; 电机转速
YA(s),YB(s) 系统输入导纳的低频传递函数
SA(s),SB(s) 灵敏度传递函数
zc 电流控制器的零点
Zs(s) 输入滤波器的输出阻抗
Zin(s) 逆变器的输入阻抗
I. 介绍
闭环控制的电力电子设备,比如变换器和电机驱动器,正常运行时具有恒功率负载特性,在系统控制环路带宽内具有负输入阻抗。此外,它可能会使输入滤波器与电源电压不稳定[1]–[4]。随着电气驱动更广泛地用于代替传统的液压和气动驱动,这种现象正在变得更加重要,特别是在交通运输应用中,例如电动飞机,其优点是控制更加灵活和精确,同时减少损失、重量和维护成本。
一般通过适当选择输入滤波器的参数来满足Middlebrook阻抗比判据[1]或其他判据 [2], [5]–[8]以避免负输入阻抗的不稳定性。甚至是,在直流母线侧加入大电容,并向滤波器添加无源阻尼网络,典型网络有电阻以及与直流侧电容并联的大电容。在诸如航空航天等不能接受电解电容的高可靠性应用领域中,通常很难使用这项技术。
作为代替,最新提出了一些主动技术,其通过修改电机驱动控制器以消除不稳定性[4],[9]–[14]。但是,其中一些技术的缺点是采用非线性数学函数,使其难以在具有模拟控制器的电机驱动系统中实现[9], [11], [12]。另外,由于电流参考值接近于零,而补偿信号是乘以电流参考值的[10],所以有些技术是无效的。
本文研究了一种可能直接实现的简单线性补偿技术。在梯形反电动势三相无刷直流驱动系统中描述和分析该技术;然而,这项技术还有更广泛的应用。除了运行描述和技术分析以外,还研究了关键的设计问题,特别的是,权衡稳定效果,抑制电机控制器性能的退化。
II. 无刷直流电机驱动与补偿系统建模
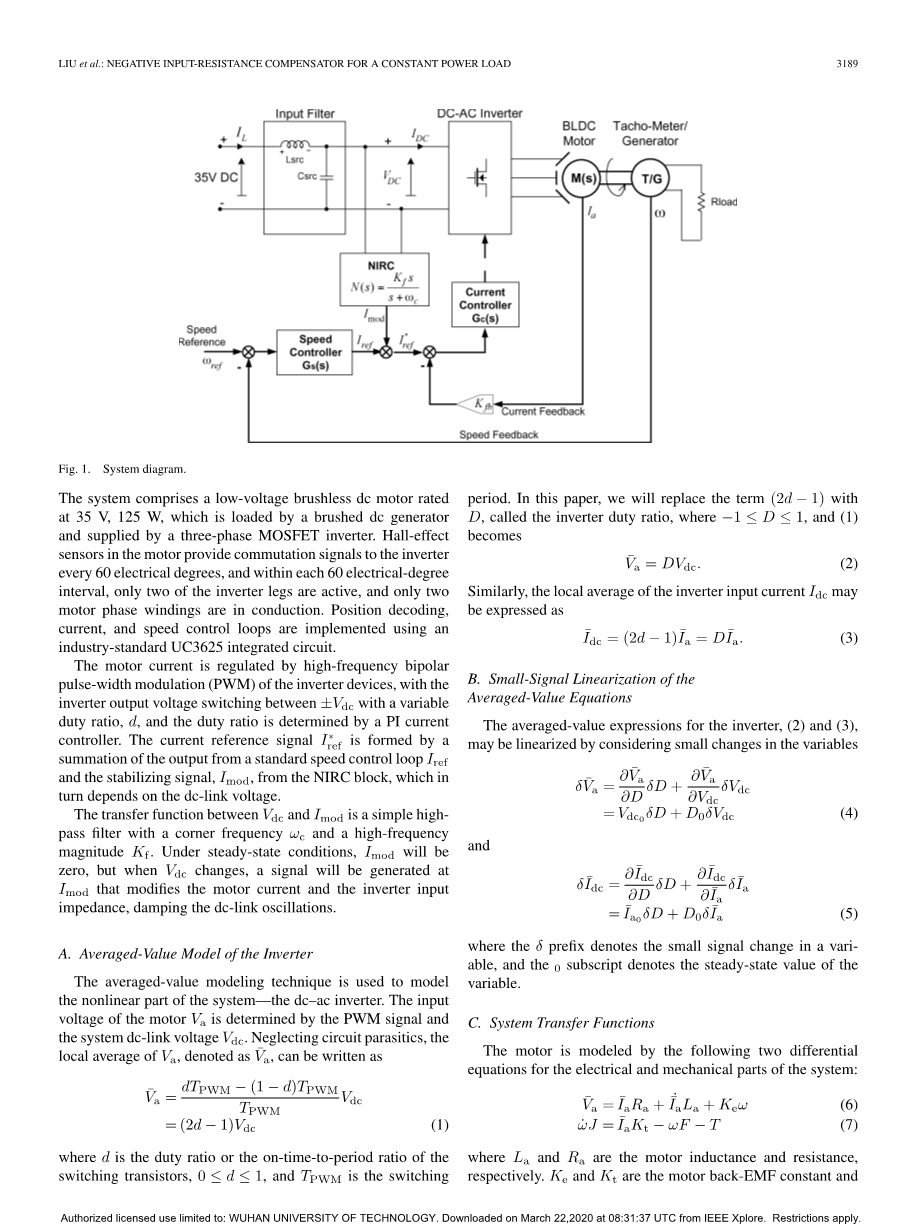
图1,系统图
在本文中提及的无刷直流电机驱动系统与负输入阻抗补偿器(NIRC)如图所示。系统包含一个额定电压35V,功率125W的低压无刷直流电机,其负载为有刷直流发电机,并由三相MOSFET逆变器供电。电机中的霍尔效应传感器每隔60电角度向换流器提供换相信号,并且在每60电角度期间,只有两个逆变器桥臂处于运行状态,并且电机只有两相绕组处于导通状态。用具有行业标准的UC3625集成电路来实现位置解码,电流和速度控制环。
电机电流由逆变器高频双级脉宽调制(PWM)调节,在可变占空比d的条件下,逆变器输出电压在plusmn;Vdc之间切换,占空比由PI电流控制器确定。电流参考信号Ilowast;ref是由标准速度控制环信号Iref与NIRC模块的稳定信号Imod的总和组成,而后者由直流母线电压决定。
Vdc和Imod之间的传递函数是一个简单的高通滤波器,其截止频率为omega;c,高频幅度为Kf。在稳定条件下,Imod为零;当Vdc变化时,会产生一个Imod信号,其通过改变电机电流和逆变器输入阻抗,从而抑制直流母线电压振荡。
A. 逆变器的平均值模型
利用平均值建模技术对系统非线性部分-逆变器进行了建模。电机的输入电压Va 是由PWM信号和系统直流母线电压Vdc决定。忽略电路寄生效应,Va的局部平均值表示为a,可以写成
(1)
其中d是开关晶体管的占空比或者导通时间与周期的时间比,0le; d le;1,TPWM是转换周期。本文将用逆变器占空比D替换(2d-1),minus;1le; D le;1,则式(1)表示为
(2)
相似的,逆变器输入电流Idc的局部平均值可以表示为
(3)
B. 平均值方程式的小信号线性化
利用小扰动信号对逆变器的平均值表达式 (2)和(3)进行线性化得
(4)
(5)
其中delta;前缀表示变量中的信号变化很小,下标0表示变量的稳态值。
C. 系统传递函数
通过以下两个用于的系统电气和机械部件的微分方程对电机进行建模:
(6)
(7)
其中La和Ra分别是电机的电感和电阻,Ke和Kt分别是电机的反电动势常数和转矩常数,J是总机械惯性,F是动摩擦常数,T是负载转矩。
图2,电流回路的小信号模型
转换为拉普拉斯域并消除电动机速度omega;,得到以下传递函数关系:
(8)
利用公式(4)、(5)和(8),得到如图2方框图所示的电机驱动系统电流内环小信号模型。
D. 系统输入导纳
为了推导电机驱动器的小信号输入导纳表达式,即,逆变器直流侧的输入导纳,将图2所示的系统的小信号模型中的参考电流delta;Iref和负载转矩delta;T设置为零。在推导中,着重研究在中频区域的导纳,即输入滤波器截止频率附近的区域,这是因为在这些频率下容易引起直流母线电压的不稳定性。假设中频区域高于速度控制环带宽,但在电流环带宽之内,因此,分析中省略了速度控制环路。第三节中对输入导纳的测量证实了这一假设的有效性。
从图二的框图中可知
(9)
(10)
用式(9)消除式(5),(10)中的delta;D,然后再消除两方程式中的delta;a,再化简结果得出输入导纳的表达式
(11)
其中
(12)
(13)
公式(11)展示了输入导纳由YA和YB的和乘以电流控制回路的闭环传递函数组成。在电流控制回路的带宽内|KfbVdc0M1(s)Gc(s)| ≫1,这与公式(11)中的第一项是统一的。YA项独立于稳定控制器传递函数N(S),因此决定了系统的固有输入导纳。YB项表示稳定控制器改变系统固有输入导纳的方式。
通过假定电流控制器具有典型的PI特性,即,Gc(s)=Kc(s zc)/s,将其带入式(12)中YA(s)可表示为
(14)
其中
(15)
在电流控制环带宽内,没有稳定控制器的情况下,系统低频输入导纳为负值-dc0/Vdc0,其极点、零点分别为zc、z1。当D0 =0时,零点与极点重合;当D0ne;0时,零点频率高于极点频率。
图3,系统输入导纳YA(s)(实线)和YB(s)(虚线)的幅值图
YB的表达式(13)可以通过使用(8)式替换M1(s)进行拓展,为了简化,假定摩擦常数F小到可以忽略不计,等式可化成
(16)
其中te = La/Ra和tm = JRa/(KeKt)分别是电机的电气和机械时间常数,H = (1 /2)omega;2J/(omega;T)是电机的惯性常数。
通过假定在大部分无刷电机中都是如此的tm ≫ te,公式(16)可近似的分解成
()17
其中
(18)
(19)
等式(17)表示YB有一个与初始状态非常接近的零点z3,极点为omega;c,高频零点z2。在极点与第二个零点之间YB的幅值为KfD0/Kfb[(1 H/tm)/(1/2 H/tm)],并有一个接近于零的相位角。因此,YB在中频范围中具有电阻特性。为了阐明YA与YB的关系,幅值响应图如图3所示。在平缓区域H对YB的幅值影响相对很小,但幅值将与稳态占空比D0成正比变化。为了使YA YB在中频区域具有正实部,必须满足以下不等式:
(20)
此外,为了最有效的衰减直流环节输入滤波器的极点,输入滤波器的固有频率极点应当落在YB渐近线图的平坦区域内,即
(21)
以上的不等21)中的不等式表明随着H的减小,即在较低转速和较高转矩下,阻尼的有效性可能降低。
E. 转矩控制的影响
添加稳定控制器将降低整个系统的性能,特别是,电机的转矩和转速对直流侧电压振荡会更加敏感。为了验证这种影响,推导了与电机转矩成正比的小信号传递函数delta;a,还有delta;Vdc 、delta;omega;、delta;Vdc。分析中假定负载转矩不变并忽略了速度控制回路。
将式(9)代入式(10)中消去delta;D,整理结果可得:
(22)
其中
(23)
(24)
与式(11)中的输入导纳公式相似,(22)式中的敏感传递函数由SA和SB两部分相加并乘以电流控制回路中的闭环传递函数表示。SA表示电机电流和转矩对直流环节瞬变的固有敏感性,而SB表示增加稳定控制器的效果。
图4,灵敏度函数SA(s)(实线)和SB(s)(虚线)的草图幅值图。
图4所示的幅值图展示了SA和SB的关系,该图表明:在中频区域,稳定控制器至少会提升电机电流对直流母线电压振荡KfVdc0Kc/D0倍灵敏度。
通过公式(22),利用对公式(7)的拉普拉斯变换得到的小信号传递函数,可以得到电机转速与直流母线电压瞬变量之间的传递函数。
(25)
(26)
当速度控制环存在时,在速度控制器的带宽内,电机转速对于直流母线瞬变量的灵敏度会减弱。
F. 稳定性分析
通过分析输入滤波器的输出阻抗Zs和系统输入阻抗Zin,即计算Zs/(1 Zs/Zin)),可以验证电机驱动和输入滤波器组合系统
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238323],资料为PDF文档或Word文档,PDF文档可免费转换为Word

