具有微凸接触的混合弹性流体动力润滑模型
Xiaofei Jiang D. Y. Hua H. S. Cheng
(1.医学工程系诺蒂韦斯特大学伊文斯顿,伊利诺伊州60208)
(2.Xiaolan Ai铁姆肯公司,康顿,俄亥俄州,邮编44706)
(3.伊维希菲亚尼奇工程系,奥利奥州立大学,哥伦布,俄亥俄州43210)
摘要:大多数的机器元件例如齿轮和轴承,都是在混合润滑区进行工作。为了评价这些摩擦元件的润滑性能,我们提出了一种混合弹性流体动力润滑的接触模型。这个模型解决了薄膜厚度不足以分离粗糙表面粗糙接触的极薄薄膜区域的问题。然后,在通过粗糙表面的接触,将宏观接触区划分为润滑区和微粗糙接触区。在存在粗糙以及粗糙接触的情况下,雷诺方程仅在润滑区域有效。粗糙接触压力由两个配合面的相互作用决定。施加的载荷由润滑油膜和接触的粗糙度来实现。利用快速傅立叶变换(FFT)技术对非周期表面进行卷积计算表面位移(正证),反卷积计算表面粗糙接触压力(反证)。随着快速的傅立叶变换和多网格方法的成功实施,在一台PC机上可以在数小时内解决100万个节点的润滑接触问题。通过这样使我们能够模拟密集网格中的随机粗糙表面。引入负载比、接触面积比和平均间隙等参数来表征具有粗糙接触的混合润滑性能。并且讨论了滚动滑动条件对微凸性取向的影响。利用速度参数对载荷比、接触比和平均加速度的影响,给出了真实粗糙地形的数值结果。
关键词:接触模型;混合润滑;粗糙度;润滑接触;微凸性
前言
对于大多数具有反形式接触的机械元件,膜厚通常与表面粗糙度的数量级相同。可能的粗糙接触会中断润滑并破坏润滑膜。固体到固体的接触通常会导致表面点蚀或擦伤故障。为了弥补弹性流体动力润滑理论与表面失效预测之间的差距,需要发展新的方法来预测极低x区域的薄膜形状、压力分布、温度和剪切应力。为了了解表面粗糙度对润滑性能的影响,特别是对压力波动的影响,人们做了许多工作。在这一领域,人们可以发现许多重要的成就,也被称为部分ehl或微型ehl。部分ehl由Christensen于1970年首创并由Elrod(1973)和Patir和Cheng(1978)进一步发展。表面粗糙度的特征用统计参数表示。采用平均压力和平均油膜厚度判断润滑性能。在这些模型中,平均流模型被广泛应用于考虑表面粗糙度和织构对润滑性能的影响。平均接触压力可由平均雷诺方程中的平均间隙来计算。然而,平均流量模型中使用的流量系数是基于未变形的表面粗糙度,这可能导致极低x部分的间隙函数和压力出现显著误差。当今计算机的不断增强使人们能够更详细地研究表面粗糙度的影响。
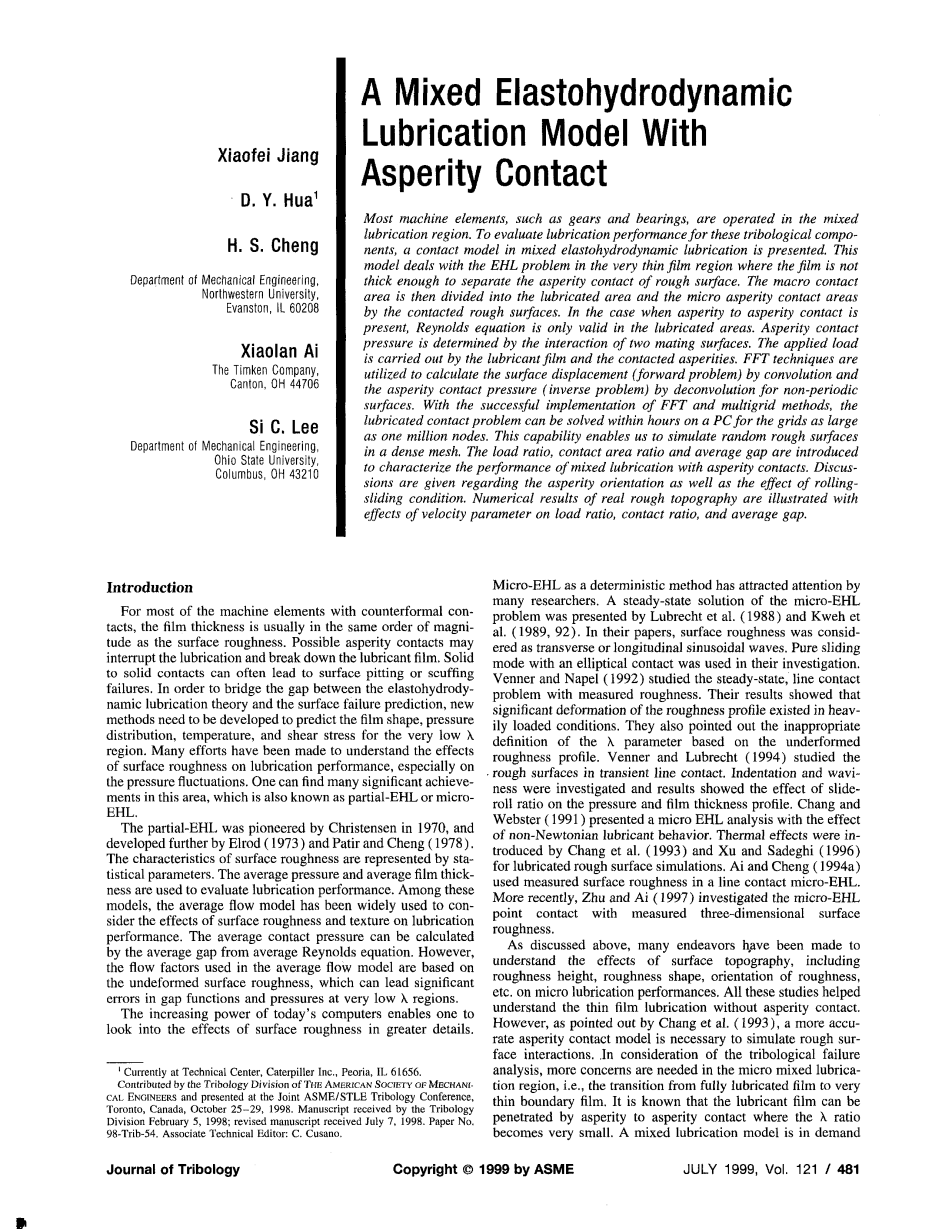
微型ehl作为一种确定性方法受到了许多研究者的关注。Lubrecht提出了微形ehl问题的不变解和Kweh(1989,92)。在他们的报告中,表面粗糙度被认为是横向或纵向的正弦波。研究中采用了椭圆接触的纯滑模。Venner和Napel(1992)研究了具有测量粗糙度的稳态线接触问题。结果表明,在重载条件下,粗糙度轮廓存在明显的变形。他们还指出了基于欠成形粗糙度轮廓的X参数定义不当。Venner和Lubrecht(1994)研究了瞬变线接触中的粗糙表面。对压痕和波纹度进行了研究,结果表明,滑滚比对压力和膜厚分布的影响。Chang和Webster(1991)提出了一个具有非牛顿润滑特性影响的微ehl分析。Chang等人介绍了热效应(1993)和Xu和Sadeghi(1996),用于润滑粗糙表面模拟。Ai和Cheng(1994a)在线接触微ehl中使用了测量的表面粗糙度。最近,ZHU和ai(1997)研究了微型ehl点接触与测量的三维表面粗糙度。如上所述,为了了解表面形貌(包括粗糙度高度、粗糙度形状、粗糙度方向等)对微润滑性能的影响,我们尽了许多努力。所有这些研究都有助于理解薄膜润滑而不产生粗糙接触。然而,正如Chang等人所指出的(1993),需要更精确的粗糙接触模型来模拟粗糙表面的相互作用。考虑到摩擦学失效分析,在微观混合润滑领域,即从完全润滑油膜过渡到非常薄的边界油膜,需要更多的关注。众所周知,在X比变得很小的情况下,润滑油膜可以被粗糙接触穿透。为了研究润滑与固体接触的相互作用,需要建立一个混合润滑模型。Hua等人(1997)提出了包括干接触压力、润滑接触压力和肉温计算在内的模拟。华和程(1997)更详细地讨论了混合润滑的微观模型。本文提出了一种混合超高压润滑油的接触模型,用于分析点接触油膜在微凸接触时的润滑情况。同时求解了雷诺方程和粗糙接触方程,得到了变形薄膜形状、动水压力分布和固体粗糙接触压力分布。利用快速傅立叶变换(FFT)技术和多重网格算法对大量网格点的表面位移和接触压力进行了快速求解。讨论了不同滚动滑动模式下润滑性能的特点。除了压力分布和油膜形状外,本文还介绍了负载比、平均间隙和接触面积比三个平均量,以描述粗接触混合润滑的特性。首先,接触负荷与总负荷之比(简称负荷比)可用来确定润滑所属的状态。如果负载比接近零,则两个表面之间没有接触或轻微的固体/固体接触,润滑变成全膜EHL。另一方面,如果负载比接近一,则情况与边界润滑主题有关,压力可通过干接触解决方案近似。混合润滑正好介于两者之间,并将润滑状态从全膜连接到非常薄的边界膜。第二,平均间隙由名义赫兹接触面积中的平均膜厚与均方根(r.m.s.)粗糙度之比定义。当涉及到粗糙度接触时,平均间隙为薄膜厚度提供了一个尺度,使其达到表面粗糙度的阶数。传统的x(lambda)参数在强接触状态下不能很好地发挥作用,因为计算时既没有考虑固体/固体接触,也没有考虑三维表面形貌。平均间隙给出了混合润滑区无量纲平均膜厚的真实信息。最后,接触面积之比,实际接触面积在赫兹面积上的分数,对应于固体/固体相互作用的严重程度。这三个比率将在混合润滑、摩擦、表面温度、地下应力和表面故障的研究中发挥重要作用
图1 微接触片微润滑区示意图
建模:
考虑到微凸接触,弹性流体动力润滑涉及流体润滑和固体接触分析及其相互作用。当薄膜区域被许多粗糙接触所打断时,计算域被分成两个区域:润滑区域Omega;f和粗糙接触区域Omega;e。粗糙接触混合润滑中润滑区域和粗糙接触区域的示意图如图1所示。Omega;e由许多离散的微凸体组成,这些微凸体被连接的淹没膜区域Omega;f包围。在润滑区域中,间隙相对较厚,流动被迫绕过微凸体。接触的微凸体会中断润滑油膜,但不会中断油流。如果粗糙接触区域为Omega;f。是整个区域的一小部分Omega;(Omega;f Omega;e),假设雷诺方程在该连续润滑区域Omega;f仍然有效是合理的。在微凸接触区,间隙为零,微凸接触压力Pc由弹性完全塑性理论确定。在微接触区,化学或物理边界膜最有可能保护固体表面。然而,我们可以假设粗糙尖端与其他固体表面接触,接触压力可以用赫兹干接触理论近似求解.
考虑了二维、等温、瞬态点接触。为了简单起见,忽略了润滑油的热效应和非牛顿效应。润滑区域Omega;f中无量纲形式的雷诺方程:
在无量纲参数:
椭圆参数k=b/a,雷诺方程的压力边界条件是:
接触区Omega;e的粗糙接触压力小于pc的时候就不受润滑方程式约束。当移动的流体撞击接触的微凸体时,流体被迫绕着微凸体流动。在薄膜厚度为零的区域,不会自动满足任何流动条件。在微接触区内,只考虑粗糙接触压力pc,薄膜厚度设置为零。为了求解微接触区边缘附近的流体压力pf,假设了一个连续的压力边界条件。换句话说,润滑剂压力等于粗糙接触边界上的非零接触压力,指出s;H(X ,Y,t)=0
包括表面粗糙度在内的粗糙接触的模厚表示为
其中S( X,Y,t)为初始表面粗糙度,V( X,Y,t)为表面弹性变形。在微接触区内,薄膜厚度设置为零。为了避免在高压下过高估计润滑油粘度,Allen等人提出了一个改进的双斜率模型。使用粘度-压力的关系如下
式中,p是无量纲过渡压力,p,=p,/pi
对于油,P,=380MPa由Allen等人提出。选择常数co、ci、c2和c3,使两个斜率之间的过渡平滑。
使用Dowson和Higginson(1977)描述的密度-压力关系:
施加在接触面上的载荷由流体和接触的粗糙度承担
负载由流体动水压力积分和粗糙接触压力积分来平衡
法向表面位移由整个区域Omega;内的流体Pf和固体接触压力P c共同作用,因为无量纲弹性变形是:
算法:
数值求解式(12)有两个问题。首先,当计算点为加载点时,方程是奇异的。解决这一问题的常规方法是构造一个影响系数矩阵,通常称为柔度矩阵。如果网格空间足够小,每个子域上的压力分布可以用其节点压力来近似,并具有一定的函数,例如常数、线性、双线性或高阶分段多项式函数。柔度矩阵是材料常常和几何结构的函数,只需计算一次。因此,每个节点的消泡量表示为节点压力的线性组合:
等式(13)的检验表明,执行所需的矩阵计算需要一个N方(N=n*m)乘法和N*(N-1)加法。这就引出了第二个问题:如何用一个合理的CPU时间来解方程?多级多重网格积分(Lubrecht和Loannides,1991年;Venner,1991年)和快速傅立叶变换(FFT)(Ju和Farris,1996年;Stanley和Kato,1997年;Nogi和Kato,1997年)的成功归功于两种算法都将等式(13)计算所需的乘法和加法的数量减少到了NlogN的顺序。NlogN和N方之间的差异是巨大的。例如,取n=10°“。在PC机上,CPU时间与2周CPU时间的差异大约为1分钟。对两个名义上平坦表面的弹性接触问题的研究可追溯到1939年,当时韦斯特加德从FIRS提出了一维正弦平面与平面接触压力和面积的解析解。约翰逊等人。(1985)以类似的方式扩展了平面与振幅远小于其波长的二维双正弦波面接触的解.对于随机曲面的局部接触问题,本文提出了一种封闭形式的求解方法,因此必须采用一些数值方法。实际上,式(12)在数学上是空间域的卷积。Ju和Farris(1996)受将FFT应用于回旋的巨大成功的启发,将式(12)转换为频域,并从Johnson公式中获得传递函数。位移的傅立叶变换是压力变换和传递函数的乘积。利用前向快速傅立叶变换和逆快速傅立叶变换,可以快速求解表面位移和接触压力。他们还做了一个很好的光谱分析来估计由频率域中的信息丢失引起的误差。结果与接触区内的解析解吻合较好,但在接触区外被高估。这主要是由于假定的周期性压力或位移。最近,Stanley和Kato(1997)利用了Westergaard(1939)对正弦波表面和Johnson等人的精确解。(1985)对于各向同性双正弦波形表面,并根据线接触和点接触的变分原理实现了FFT算法。他们接近刚性平面/半空间的弹性接触,表面高度可以用有限带宽的傅立叶级数来描述。
从Ju和Fams(1996)、Stanley和Kato(1997)、Nogi和Kato(1997)的论文中,当需要大量数据时,FFT在计算弹性变形和接触压力方面显示出巨大的威力。然而,他们的方法假定有两种情况并非普遍存在。首先,它假定输入信号(压力或位移)是周期性的,因为曲面是周期性的,而实际曲面通常永远没有重复,或者由一个有限长度的非周期拉伸组成。其次,线接触和点接触的传递函数在零频率下是奇异的,不允许除法。我们可以利用非周期序列的卷积和弹性矩阵来解决这两个约束。实际上,式(13)是压力和柔度矩阵的离散卷积:
最后通过反傅立叶变换得到变形量。对于粗糙接触压力计算,我们希望通过了解变形来求解压力。压力的计算与变形计算相同,即式(14)
但左侧已知,并且(14)被视为一组未知量p(x,y)的(=m*n)线性方程。在空间域中求解这些联立线性方程是非常困难的。迭代是必要的,可能会遇到数值不稳定性(Ren和Lee,1993)。不乘以压力和柔度矩阵的变换得到卷积的变换,反卷积压力的变换是已知变形和柔度矩阵变换的划分:
用IFFT恢复了粗糙接触压力。近三十年来,快速傅立叶变换的应用是一个非常活跃的领域。市面上有许多FFT套餐。我们使用了微软Fortran PowerStation专业版4.0,它包括模块drconv,两个任意长度的实非周期序列的卷积。对于逆问题,接触压力是变形与反柔性矩阵id(x,y)的卷积。
通过假设矩形子域(dx,dy)上的均匀压力,在当前分析中使用了一种简单的柔度矩阵形式(Hamrock和Dowson,1981年):
傅立叶变换最重要的特性之一是卷积定理,它允许完全自由地在时间(或空间)域中通过频域中的简单乘法进行数学卷积。
换句话说,卷积的傅立叶变换只是单个变换的乘积,其中k=b/a是椭圆度参数。目前的方法已经与以前的方法进行了比较。
对于正问题和反问题,目前的快速傅立叶变换方法得到的结果与柔度矩阵法(AI,1994)和移动网格法(Ren和Lee,1993)得到的结果一致。基于上述数值技术,在流体弹性流体动力压力解算器和固体接触压力解算器之间进行了较低的递推迭代,直到两个解算器收敛。流体压力和固体压力以流体/固体边界上的连续压力假设为边界,两者都受接触面变形的影响。油膜形状和压力分布不仅受润滑作用的影响,还受粗糙接触的影响。
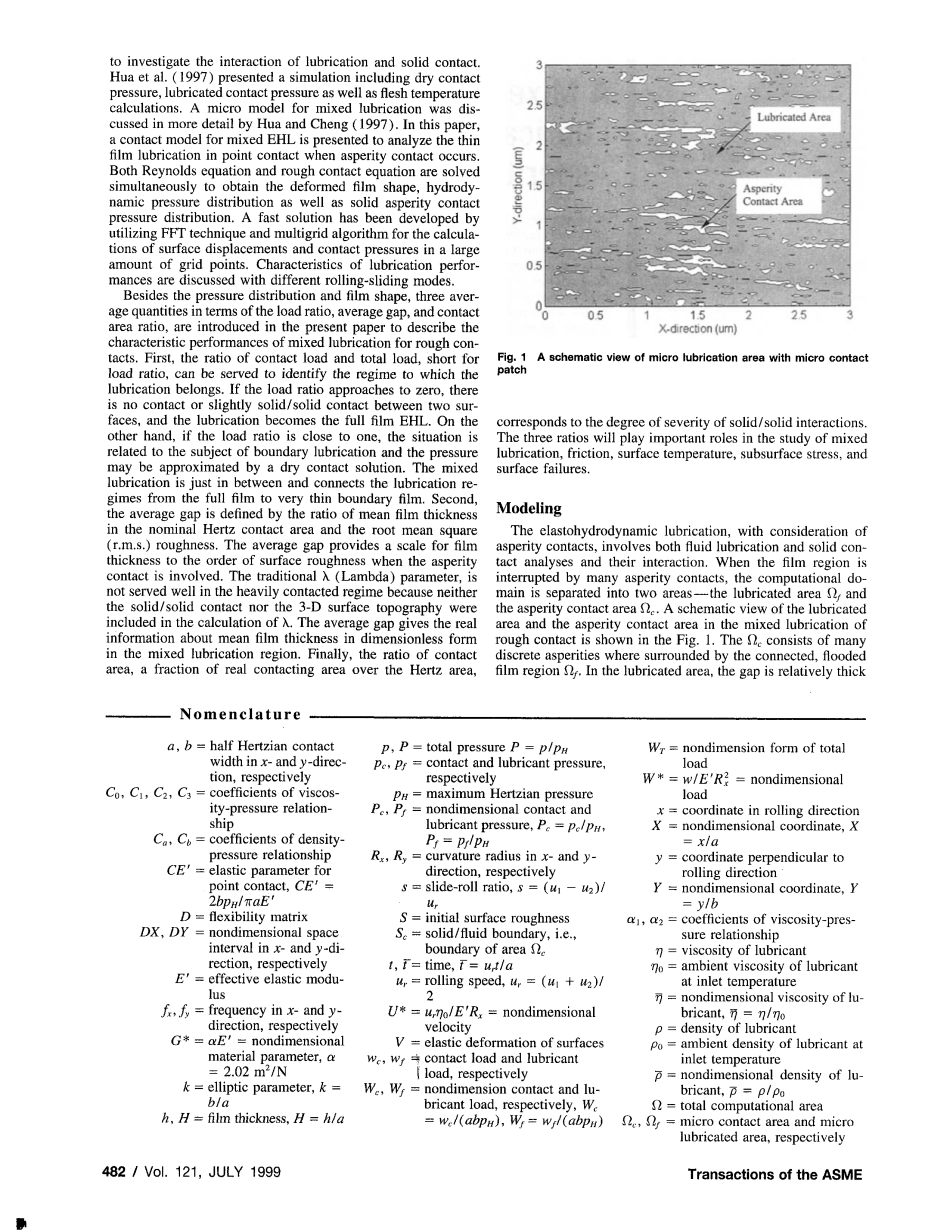
图2 微凸接触压力求解器混合润滑流程图
粗糙的接触带着部分负荷,迫使润滑剂在每个接触区域周围流动。当间隙小于零时,采用表面穿透作为输入,通过二维快速傅立叶变换反褶积(反问题)计算粗糙接触压力。然后将间隙设置为零,并确定实际接触面积。截止压力被用来考虑(尽管相当粗糙)在粗糙接触处塑性屈服的可能性。在迭代过程中,压力(固体压力和流体压力)被强制保持在从零到截止值的范围内。选择较软材料的硬度作为压力上限。利用多重网格(Ai和Cheng,1994b),高斯Seidal或Sor算法以及快速傅立叶变换(FFT)技术,同时求解了雷诺方程、包括二维快速傅立叶变换(FFT)卷积变形计算在内的薄膜形状方程、润滑区域的粘压关系和密度-压力关系。实际接触点是在薄膜厚度小于零或等于零的点上确定的。薄膜厚度在物理上永远不会是负值。然而,在数值迭代的过程中,负膜厚度
英语原文共 20 页
资料编号:[4621]

