英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
包括SFOC最小化,电网调节和辅助推进在内的船舶轴带发电机系统设计及船舶运行改进
Athanasios G. Sarigiannidis, Student Member, IEEE, Efstratios Chatzinikolaou, Student Member, IEEE, Charalampos Patsios, and Antonios G. Kladas, Senior Member, IEEE
摘要:本文研究了一种由永磁同步发电机(PMSG)和背靠背变换器组成的改进型轴带发电机(SHG)系统在滚装船上的设计和实际应用。该系统可同时在发电模式和驾驶模式中运行,为船舶电网提供有功功率和辅助服务,并在紧急情况下驱动船舶主轴。虽然现在在单个组件的设计和优化方面的文献有很多,但是我们应该同时研究子系统及其相互作用,以便准确地评估在实际应用中实施这些解决方案的优点。本文首先对电机和功率变换器控制子系统的设计进行了研究和改进,并对系统在各种工况下的运行情况进行了评,同时还研究了一种传统的高速凸极同步发电机和一种低速直驱PMSG。然后根据指定的操作特性对它们进行几何优化,并对控制器进行了优化设计,还在稳态和暂态状态下对系统的运行分别进行了评估。仿真结果表明,与常规SHG系统相比,该系统可提供重要的电网服务,作为应急推力机构,可使典型航次的燃油消耗降低3%。
索引:背靠背变换器,更多的电动船舶,永磁同步发电机(PMSG),凸极同步发电机(SPSG),轴带发电机(SHG)。
1:提要:温室气体和有害微粒物质的过度排放造成的不良影响使得人们对于使船舶更节能环保的海洋技术应用产生了越来越浓厚的兴趣。 [1}在过去的几年里,由于轴带发电机系统(SHG)在能源效率、噪声水平和可靠性等方面比备用发电机具有显著的优势[2]-[4],因此在过去的几年中得到了广泛的应用。然而,由若干因素影响,如拟议机械系统的复杂性增加,缺乏可控性,以及在泊位时无法发电,实际上上阻碍了使用SHG来支持船舶的电力网络并提高其总体效率[2]-[4]。在电机设计和电力电子控制领域的进展可以缓解这些限制,并可优化设计,可以提供效率的阶跃变化,并提供重要的电网服务。
目前的文献缺乏支持这一转变的实例。相关的研究要么侧重于单个组件的优化,而忽略了它们的集成和端到端系统性能[5],要么使用不知道子系统设计和操作所涉及的特殊性的低细节模型来分析后者[6]。本文试图通过引入一种整体方法来填补这一空白,该方法从一开始就对子系统的设计进行了优化,并使用足够详细的集成模型对系统运行进行了验证。作为实际船舶动力系统的一部分,进行了优化的元件设计,并在不同的操作方案下进行了试验。得到的方法可以用来揭示真正的潜力和评估新的SHG系统的好处。我们的发现有助于支持在海洋工业降低碳排放方面的创新实施。
更具体地说,本文针对已有的Ro-Ro拖车-客船应用,设计并分析了一种高效的SHG驱动系统。在第二节中,介绍了目前使用的主要SHG系统配置以及正在研究的特定船只的详细情况。在第三节中对两个候选的发电机:一个是传统的凸级同步发电机(SPSG),另一个是低速永磁同步发电机(PMSG)采用不同的SHG系统拓扑,功率输出/恒频电流(PTO-CFE)和PTO-齿轮恒定比(PTO-GCR)。结合参数使用基于固定步长二维有限元模型搜索的优化技术进行设计和几何优化。然后根据性能、效率、电能质量和重量对优化的配置进行评估。对这两种具有相同额定功率的SHG拓扑的评估提供了对机械频率调节系统和电气频率调节系统之间的比较的宝贵见解。接下来,在第四节中,设计了适合直接驱动的低速二次谐波电机的驱动系统,包括变换器的拓扑结构和控制策略。第五节通过动态仿真分析,对所提出的为稳态和暂态运行提供有功和有功功率的SHG系统运行进行了广泛的评价。根据本文第六节总结的结果,可以得出结论:该系统可以与船舶发电机一起充分运行。它还可以作为一种完全可控的静止同步补偿器(STATCOM),取代传统的、不灵活的并联电容器装置,并通过在电力需求高峰期(如机动运行)提供有功功率来支持主发电机。最后,我们证明,仔细选择主发电机和辅助发电机组的运行方式可以带来可观的经济和环境效益,从而降低燃料消耗。
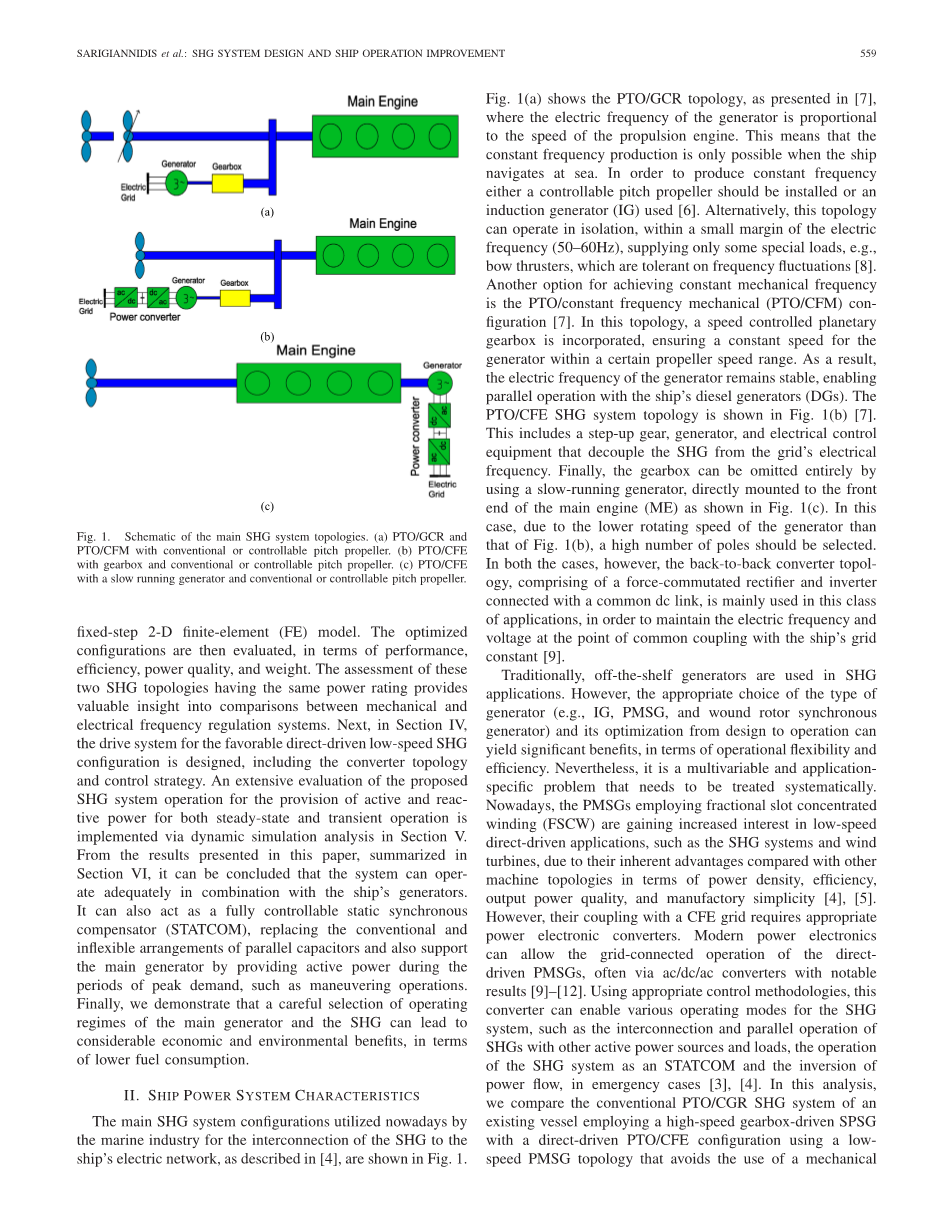
2:电力系统特性 :如[4]所述,海运业目前使用的用于将SHG与船舶电力网络互连的主要SHG系统配置如图所示。图1
图2-1(A)显示[7]中所示的PTO/GCR拓扑,其中发电机的电频率与推进引擎的速度成正比。这意味着,只有当船舶在海上航行时,才有可能实现恒定频率的生产。为了产生恒定的频率,要么安装可调螺距螺旋桨,要么使用感应发电机[6]。或者,这种拓扑可以在电频率(50-60 Hz)的小范围内孤立地工作,只提供一些特殊的负载,例如耐频率波动的弓形推进器[8]。实现恒定机械频率的另一种选择是PTO/恒定频率机械(PTO/CFM)配置[7]。在此拓扑结构中,采用了速度控制行星变速箱,确保发电机在一定的螺旋桨转速图2范围内保持恒定速度。因此,发电机的电频率保持稳定,可与船用柴油发电机(DGS)并行运行。PTO/CFE SHG系统拓扑如图所示。 这包括一个升压齿轮,发电机和电气控制设备,使二次谐波从电网的电频率中分离出来。最后,齿轮箱可以完全省略使用缓慢运行的发电机,直接安装在前端的主机(ME),如图所示。1(C).。在这种情况下,由于发电机的转速低于图。1(B),则应选择较多的极数。然而,在这两种情况下,背靠背变换器拓扑主要用于这类应用中,主要是为了保持与船舶电网的共同耦合点的电频率和电压[9],该拓扑由一个力换向整流器和一个与共用直流环节相连的逆变器组成。
传统的发电机仅用于倍频应用。然而,适当选择发电机类型(如IG、PMSG和绕线式转子同步发电机),并从设计到运行进行优化,可在运行灵活性和效率方面产生显著效益。然而,这是一个需要系统处理的多变量和特定于应用的问题。目前,采用分数槽集中绕组(FSCW)的永磁同步发电机(PMSG)由于其在功率密度、效率、输出电能质量和制造简便性等方面与其他机械拓扑相比具有的固有优势,在诸如二次谐波系统和风力涡轮机等低速直接驱动应用中正受到越来越多的关注[4]、[5]。然而,它们与CFE电网的耦合需要适当的电力电子变换器。现代电气设备可以允许直接驱动的PMSG的并网运行,通常通过AC/DC/AC转换器,取得了显著的效果[9]-[12]。使用适当的控制方法,该变换器可以使SHG系统在紧急情况下能够实现各种运行模式,如SHG与其他有源电源和负载的互连和并联运行、SHG系统作为STATCOM的运行以及潮流的反演[3]、[4]。在此分析中,我们比较了现有船舶采用高速齿轮箱驱动的SPSG的常规PTO/CGR SHG系统和采用低速PMSG拓扑的直接驱动的PTO/CFE配置,避免了机械适应系统。为了在两个系统之间进行较为“公平”的比较,从设计阶段起,对两台发电机,即对SPSG和PMSG进行了优化,尽管SPSG的标称值是从实际系统中得出的,但本文还是建议了一种新的经过改进的设计。
新设计的船舶电力系统如图所示
图3
船舶发电包括两个2.1兆伏安的主发电机组和两个各为2.4兆伏安的自燃发电机组。此外,还安装了2.1毫伏安的紧急备用电源。标称电网电压频率为60 Hz,两个电压电平(440和230V)用于高功耗和低功耗[13]。电力负荷由三个主要部分组成:1)电动机控制中心,由不同类型的小型电动机组成-负荷A,2)高压电耗(440 V)-负荷B,3)低压用户负荷C,3)低压电动机控制中心-负荷A,2)高压电耗(440 V)-负荷B,3)低压用户负荷C,3)电动机控制中心。(D)船首和船尾推进器,为大功率感应电动机,负责船舶操纵负载D。在特定船舶上,现有的SHG为PTO/CGR拓扑,没有电气控制系统。为了保持SHGS恒定的速度,安装了机械控制系统,特别是可调螺距螺旋桨。由于机械控制系统对外部条件的依赖性,如海洋、天气条件和操纵情况,船员避免了SHG和DGS的并行,从而大大限制了SHG在船舶作业中的贡献[13]。表一列出了被调查船舶上安装的发电机的特性。主推进发动机转速为400rpm,PTO将SHG的转速转换为1200rpm。表二[13]列出了在海上航行和操纵情况下,从这艘特定滚装船的适当测量中得出的典型功率消耗。
考虑到配电电缆中的电压降,SHG和DG的额定定子电压(450V)略高于标称电网电压(440V)。配电电缆的尺寸是由表1中所列的SHG和DG的额定电流(关于电缆横截面积)和发电机到主网母线的距离(关于电缆长度)确定的。配电电缆的标称电流密度为4 A/mm2,以获得足够的耐热性,而电阻和电抗的计算则基于基本其分析技术[14]。表三总结了SHG和DGS配电电缆的特性。
三.结果和讨论。
如第二节所述,本文对高速齿轮箱驱动的SPSG和低速PMSG拓扑进行了比较。这两种机器拓扑具有相同的额定功率规格,并从实际的SPSG系统派生而来。无论如何,这两种设计都是经过优化的,因此比较能够尽可能客观。一般来说,高速齿轮箱驱动的电机,即PTO/CGR SHG配置,具有简单、可直接耦合到电网和避免功率转换损耗的优点。无功发电可以实现使用传统的自动电压调节器(AVR)控制器。直接驱动的二次谐波配置(PTO/CFE)避免了机械适应系统,即齿轮箱,受益于永磁电机在功率密度、效率和制造简单性方面的固有优势[8]、[9]、[15]。背靠背转换器存在的公共耦合点则提供了更强的电压生成可控性。
- 初步设计。
对于这两种同步电机的设计方法,首先采用传统的分析设计方法,以估量电机的基本特性,并为优化程序[15]、[16]规定设计变量的适当限度。由于电磁场表示的近似性质,这种分析方法不能实现详细的设计优化,但它提供了一组充分接近全局最优区域的初始设计变量。应该注意的是,这个初步的过程是至关重要的,因为它可以缩小设计变量域的范围。初步设计的重点是满足表I所列的操作规格。
对于SPSG拓扑,磁极对和转子速度的值如表I所示,因为它与已安装的SHG配置(PTO/CGR)相同。选择了双槽/极/相的分布式全螺距绕组结构。这样的绕组结构表现出低磁动势(MMF)谐波含量和利用转子凸极。此外,由于发电机定子中没有功率变换器来适当控制功角,因此由于频率振荡时所需的转矩储备,功角等于25°(delta;60°是由于转子凸起而产生的最大扭矩)。对于PMSG拓扑,标称速度为400 rpm,因为SHG直接安装在ME轴上,而指定的功率等于安装的SHG。采用20极-24槽组合,采用双层FSCW。为了减小磁通空间谐波、齿槽转矩和故障电流,增加电枢电抗,选择了磁极数目。此外,高频产生的电动势(EMF)可以降低PMSG-PTO/CFE SHG结构中AC/DC/AC变换器直流侧电容的电容值。但是,为了使铁损和PMs涡流损耗保持在可控范围内,应避免较高的极数。由于FSCW具有较高的绕组系数和正弦特性,因此被选用为专用FSCW。
对于产生的电动势的分布[15]。在本文中对于这两种机器拓扑,在额定工作条件下,电流密度被指定为4 A/mm2。
针对两台同步电机的最终设计,本文提出了一种特殊的优化设计方法,并建立了参数化固定步长二维有限元模型。该模型所采用的优化方法是一种直接基于搜索的技术,利用具有代表性的(全局)样本集来探索设计空间。更具体地说,优化程序在基本的机器变量中执行扩展的灵敏度分析,目的是使用复合成本函数[16]使性能和效率最大化。整个过程如图所示
优化器调用自动的参数化PMSG或SPSG设计脚本,生成与每个优化运行相对应的2-DFE模型。PMSG和SPSG配置分别选择两个和三个设计变量,如图所示。
Xi= PMSG rArr; [tw mw] 图5
.=
SPSG rArr; [I f tw dsy]i
其中,tw是齿宽(齿距的百分比),mw是磁铁的宽度(极距的百分比)。另外,If和DSY是磁场电流和定子磁轭。
表1
表2
表3 表4
此处应指出,对于PMSG拓扑DSY 2 tw,由于采用FSCW拓扑,而对于SPSG拓扑,由于采用全螺距分布绕组,因此选择定子轭作为独立的设计变量是非常重要的。
约束处理策略是“死刑”。对于每个生成的试算向量,如果至少有一个约束被违反,则计算约束函数,并立即拒绝潜在的解。两台同步发电机的主要运行约束涉及公称负载下的最小效率值为(98%)、最大齿内磁通密度为(1.95T)和指定转矩的满
全文共19033字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[2867]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

