英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
可在 www.sciencedirect.com 在线查阅
科学直通车
第十五届移动系统与普适计算国际会议 (MobiSPC 2018)
基于智能信息技术的智能自主船舶体系结构的构成
以下是大致摘要
随着近年来信息技术的发展, 各种数字技术和自动化技术也被用于造船/航运业, 现有的封闭结构正在向基于信息和通信技术的开放结构转变。是否在船舶上安装和操作的各种系统 (导航通信、发动机等) 仅限于每个单元功能和提供的功能,这些信息通信技术采用基于信息通信技术的信息通信技术, 通过船舶内部和外部系统之间的交互和集成, 实现和共享相互信息。此外, 第四次工业革命的超连通和超智能技术的发展对造船和航运业产生了迅速而广泛的影响。在这一变化中, 我们设计了一个智能自主船舶架构, 利用智能信息技术 (ICBMS AI) 实现无人船舶的发展, 该技术是四大工业革命的技术,和远程运营和管理系统, 可以安全、经济和高效地运行它。本文从船舶零部件、航运物流特点、船员职责、角色、智能信息技术应用等多个角度对该技术进行了分析, 提出了智能自主技术。船舶与海岸体系结构, 其中智能自治船与海岸之间的信息。
copy;2018作者。由 Elsevier Ltd. 出版。
这是 CC BY-NC-ND 许可证下的开放访问文章
第13届未来网络和通信国际会议和第15届移动系统和普适计算国际会议科学委员会负责同行审查。关键词: 物联网;大数据;云;移动设备;安全;人工智能;智能船舶;电子导航。
1. 导言
由于油价下跌、订单竞争激烈、船舶排放量大, 近期造船业正在推动安全、节油、能够应对国际法规的技术优势船舶的发展通过对环保技术的抢先研究和开发, 加强船舶设计能力。航运公司正集中精力在激烈的物流竞争中提高船舶的营运效率,引进高经济的船舶, 以确保安全运输和成本竞争力。此外, 近年来ICT (信息通信技术) 技术的快速发展也在加速船舶的数字化和自动化。作为证明, 海事组织 (国际海事组织) 推动电子导航、将信通技术纳入造船、航运业 [1, 2] 、智能船舶 [3-5] 和先进造船商的无人自主船舶研发活动,航运公司在造船和航运业也公布了一个新的范式转变。
在造船和航运业的这种变化中, 本文提出了智能自主船舶和通过集成智能信息技术 (5,6](ICBMS: 物联网、云计算、大数据、移动、安全) 实现经济、安全和高效的海岸体系结构, 尤其是在 ict 领域, 这一点在无人船舶的诞生方面显得非常有用
。
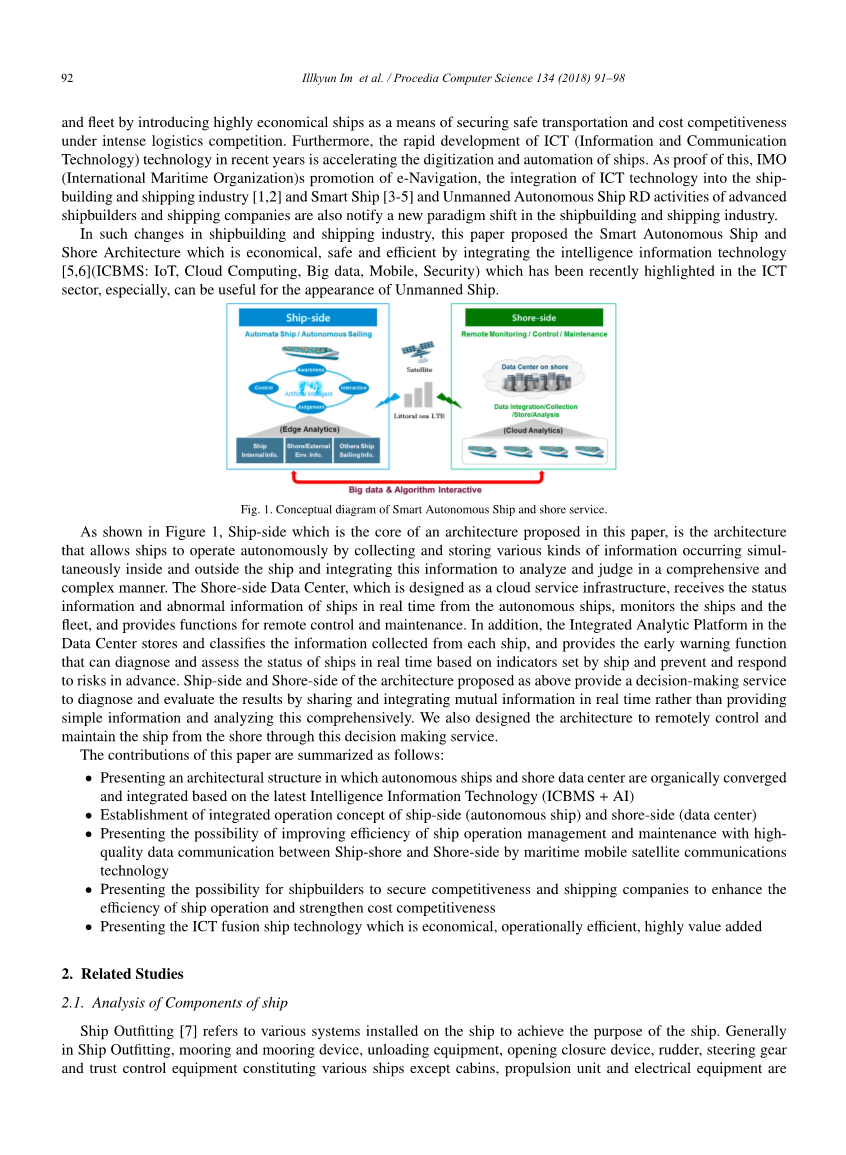
如图1所示, 船舶侧是本文提出的体系结构的核心, 它是一种通过收集和存储船舶内外同时发生的各种信息来允许船舶自主运行的体系结构。整合这些信息, 以全面和复杂的方式进行分析和判断。海岸数据中心被设计为云服务基础设施, 从自主船舶实时接收船舶状态信息和异常信息, 监控船舶和船队, 并提供远程控制功能和维护。此外, 数据中心的综合分析平台存储和分类从每艘船舶收集的信息, 并提供预警功能, 可以根据船舶和船舶制定的指标实时诊断和评估船舶状况。提前预防和应对风险。上述架构的船边和肖面提供了决策服务, 通过实时共享和集成相互信息来诊断和评估结果, 而不是提供简单的信息并对此进行分析全面。我们还设计了该架构, 通过这项决策服务, 从岸上远程控制和维护船舶。本文件的贡献概述如下:
1介绍基于最新智能信息技术 (ICBMS AI) 的自主船舶和海岸数据中心的架构结构。
2建立船舶 (自主船舶) 和岸侧 (数据中心) 的综合运营理念, 为利用海上移动卫星通过船舶运营管理和维护通信能力的高级技术为改善船岸与岸方之间的平等数据通信提供了可能。
3为造船商提供确保竞争力的可能性, 并为航运公司提供提高船舶运营效率、加强成本竞争力的可能性。
4介绍经济、高效、高附加值的 ICT融合船技术。
2. 相关研究
2.1. 船舶部件分析
船舶装备 [7] 是指安装在船舶上的各种系统, 以达到船舶的目的。一般在船舶装备、系泊和系泊装置、卸料设备、开闭装置、舵、转向装置和信托控制设备中, 除船舱、推进装置和电气设备外, 还可分为各类船舶船体、居民区和乘客或船员进入住宿的控制区和其他控制通道区, 以及机房中的推进装置、电气设备、驶入机械所需的辅助设备以及航行设备,通信, 监测和控制船舶进入用电状态。
对于详细的船舶装备部件, 船舶配备了许多机械和控制设备供自己操作。这表明, 除非将机器人或自动化技术应用于船舶的各种机械和控制设备以达到船舶的目的, 否则在无人船舶上无法实现船舶的目的。例如, 船舶系泊时降低锚杆, 在船系泊时提升锚杆, 或在船舶系泊时吊起锚, 在船舶启动时起吊的卸荷设备, 或装卸货物装卸设备的功能由中央控制系统在无人飞船上指挥的并且应该自动地执行。
当无人驾驶船舶在海洋中航行时, 船舶在内部和外部都面临各种风险 (如船舶碰撞、搁浅或海盗入侵)。此时, 船舶应自动控制或远程控制, 通过现场自主判断和决策防范和避免危险。这意味着, 除非将机器人和自动化技术应用于船上安装和操作的机械或控制设备, 否则无人船舶是不可能的。
2.2. 航运物流的功能分析
航运业是指在国际贸易中利用船舶贸易和海上保险等方式, 包括货物海运的业务。如图2所示, 使用船舶的一般物流功能由运输、仓储、卸货、包装、加工和信息等六项功能组成, 其中运输和仓储是主要功能,其他功能是有效地进行运输和仓储的辅助手段 [8]。
运输的核心, 也是物流的主要功能可分为几个类别。首先, 船舶的管理一般由船长代表船东进行。主要船舶 (航运业的生产单位为船舶)进行的销售管理, 船长在交付过程中履行的船员管理、收货、出货、运输、装卸流程、手续等业务行为) 是一项任务, 应由船长在总部的指导下执行, 并向船长报告。
第二, 由于航运业务是在国际市场上进行的业务行为, 船舶应当在停靠港的路线中与总公司合作或与分支机构之间分享信息的同时开展业务活动。第三, 航运业务是船舶经营者以船舶收购和持有、船舶管理和监督以及船队运营为中心的任务。第四,例如船舶预防性维护、备件采购、操作节油、提高船舶管理效率、降低运营成本等任务。
考虑到上述运输功能, 智能自主船舶应考虑以下功能要素, 对船舶和船队进行经济高效的运行管理。
- 由于没有人要求执行船长在无人船上执行的各种销售管理和办公室事务任务, 因此应该有更换的计划。
- 自主船舶和船队应当提供总部 (船务公司)、境外代理机构之间船舶位置、货物状况等信息交流、共享等功能。
- 有必要能够检查发生在船舶内外的船舶状况信息。
- 要了解船舶内外发生的突发事件和异常情况, 采取对策。
- 船舶发生故障时, 零部件采购要顺利, 原因要远程分析解决。
- 应在陆地上对船舶进行远程监测, 并对其进行远程控制。
2.3. 海员的职责和作用
遵守《海事组织国际公约》的每个国家都应制定国家法律, 并经营负责国际物流的国旗运输公司。目前, 自主船舶没有制定法规或规则, 也没有适用的惯例, 但我们分析了登船的水手 (船长、航海家、工程师和其他海员) 的职责和作用, 以获得其职能自主导航和自动驾驶所需的功能。海员的职责和作用是根据海洋事务和鱼类部的法律法规得出的, 应由安装在自主船舶上的装置或设备的自动化和信息服务功能的发展所取代,这也就是无人船舶的概念。
2.4. 自主船舶的推广趋势
由于物流竞争激烈, 近期运输成本下降, 加剧了船舶运输公司的管理, 使其激烈竞争。此外, 船员工作环境差, 难以获得具有专业能力的海员,以至于85%的海上事故是人为灾害造成的。因此, 为了经济、安全地操作船舶,对自主导航和自动控制技术的需求越来越高,。此外, 作为第四次工业革命核心的情报信息技术的发展, 正在推动自主船舶的出现。有了这些技术发展的机会, 每个国家 (中国、日本、欧盟、韩国等) 都在通过公私方式促进生态友好型自主船舶的发展,这也预见了在造船业和航运业的新市场范式中,向新的市场范式的转变。
中国在中国船舶制造总公司 (中国造船总公司) 的参与下, 建立了中国的技术标准船级社 (ccs), 最后通过环保效果评价等方法, 瞄准无人船舶的商业化。日本启动了由设备制造商联合组织的智能船舶应用平台项目, 船舶标准化和标准化平台的质量和质量标准,船舶与海岸之间的信息交换, 在核查阶段反复出现。
欧洲执行了穆宁, 这是建立无人船舶概念的自主航运项目, 并正在推动到2035发展完全无人的自动化船舶。此外, 欧洲先进的设备公司和造船商正在积极与航运公司合作, 推广无人船舶, 以确保物流创新和成本竞争力。例如, 劳斯莱斯正在预计到2020年发展一艘遥控船和一艘到2035可以在海洋中航行的无人自主船舶,亚拉伯克兰和康斯伯格正在共同推动2018年下半年的交付和在2020年投入运营的无人自主船舶, 目标是每年更换挪威海岸用于化肥运输的约4万辆卡车。在政府的倡议下, 芬兰正在推行 AAWA (高级自主水上应用) [14], 涉及劳斯莱斯、国际海事卫星组织 和挪威船级社等10个组织, 旨在设计和详细设计下一代自主应用船舶。
在韩国, 现代重工和 ETRI (电子和电信研究所) 联合建立并商业化了 SAN (船舶区域网络) 平台, 该平台集成了机载设备的信息。目前, 统计信息网应用了最新的ICT技术, 如远程访问现有平台、机器学习、AR/VR、大数据、和开发到企业市场。自主发展的特点是: 在遥远的国外发展控制和操作平台, 以有效地操作船舶和船队, 发展自主的工作, 在确定功能方面进行核查, 从而定义一个全面的作业概念以及全面管理船侧和岸侧的体系结构。
3. 无人船舶定义
本文所述的自主船舶是基于挪威自主船舶论坛中定义的周期性无人船 (RUS), 图3中: 该船舶可以在公海和良好的天气没有船员的情况下在甲板上进行有限的操作,。万一出现问题,船上的船员会被叫到甲板上。
无人船舶的定义
无人船舶的运行和控制方法大致可分为三类, 如图4所示。首先, 船舶将安全地从引航员登船/出港进入港口, 直至通过 (FAOP) 和海上通道结束 (EOSP) 时完全离开。此时, 从无人船舶上恢复船舶的运行控制, 并与陆地中心的远程运营者合作控制船舶。其次, 深海是通过对船舶的独立判断自主运作的。第三, 船舶内外发生异常情况时, 由无人船舶远程控制。通过将船舶运行过程中产生的导航信息传送到陆地中心, 可以实时监控船舶的状态。确定了船舶设备或设施中传感器 (相机、各种传感器信息) 的分析, 并确定了远程控制船舶的措施。
4. 无人船舶的智能信息技术
第四次工业革命的最新时代被称为智能信息技术。智能信息技术是实现高级信息处理活动 (认知、学习、推理和决策) 的基础技术, 例如在人类感知到信息时做出适当的行为通过感官被传递到大脑。最近, 它被称为 ICBMS (物联网, 云, 大数据, 移动, 安全) AI(人工智能)。
物联网-互联汽车。物联网意味着事物与互联网相连, 但并不意味着事物在物理上或概念上都是连接的。事物的意义在于, 它们可以提供新的功能和新的价值, 而这些功能和价值在事物本身连接时是无法提供的, 重要的是要利用连接的东西所创建的数据来创造对用户有帮助的价值。从这个意义上说, 智能无人船类似于物联网-互联汽车。
随着 ICT和汽车的融合, 互联汽车不断发展, 早期就一直关注在传感器周围行驶的安全性。最近, 它已被应用到互联网 (IOT), 以最大限度地提高车辆的安全性。汽车-ICT融合的趋势是基于连接、可穿戴、设备、环保、自主驾驶技术、车辆和应用程序、自助应用商店之上的, 以提供信息连接和访问性, 从而使车辆可以用作信息设备。主要组件是内置设备和平台, 这些设备提供嵌入汽车中的各种信息和服务, 网络设备允许访问各种内部设备或外部网络, 服务和内容可由乘客连接。连接的内容包括可穿戴的v2x (车辆到一切) 通信环境中的自主导航、云连接、操作员交互系统和远程信息处理。
云-IT信息服务。云服务通过有线和无线移动终端和互联网随时随地为用户提供所需的IT资源, 作为第四次工业革命中的一个关键行业, 它正受到人们的关注。云服务是一种按需服务, 提供基于 internet 的资源、软件和信息基础架构。服务提供商分发和虚拟化大量计算机资源, 并根据需要向 internet 提供必要的资源。技术组件包括分布式计算、虚拟化、系统管理、服务平台服务、计费和用户身份验证。云服务模型有三种模式: 基础架构即服务 (IAAS)、平台即服务 (PAAS) 和软件即服务 (SAAS)。云服务通常根据服务目标分为公共服务、私有服务和混合服务。公共服务由未指明的多数的第三个服务提供者管理。通过在企业和组织内配置云服务环境, 私有服务为内部人士提供有限的服务。就混合服务而言, 它是公共和私人服务的结合。它通过为不希望共享的数据设置私有策略来限制服务, 并提供与利益干系人共享所需的信息。本文基于一般云基础架构 (IAAS、PASS、SASS)、为造船商提供的定制应用程序和分析服务, 实现了智能自主导航船舶架构中的云基础架构服务。我们提出了一个混合云的概念, 通过在利益相关者之间共享和传播信息, 实现经济和有效的工作。
大数据平台-分析服务。人与事物之间的所有活动相关
全文共7381字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1179]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

