
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
联网自动驾驶车辆碰撞模式与特征的统计分析
摘要:本研究旨在探讨连结式与自主式车辆(CAV)碰撞之特性与模式。方法:从提交给加州机动车辆管理局的CAV事故报告中收集事故数据。采用描述性统计分析方法,从碰撞位置、天气条件、驾驶模式、碰撞发生前的车辆运动、车速、碰撞类型、碰撞严重程度和车辆损伤位置等方面,探讨了CAV的碰撞特征。然后,基于bootstrap的二元logistic回归被开发出来,以研究导致CAV相关碰撞类型和严重程度的因素。结果:CAV的驾驶方式、碰撞位置、路边停车、追尾碰撞和单行道是影响CAV事故严重程度的主要因素。CAV驾驶模式、CAV是否停车、CAV是否转弯、车辆是否正常转弯、车辆是否超车是影响CAV碰撞类型的因素。
关键词:联网自动驾驶车辆、碰撞、碰撞类型、碰撞严重性
一、介绍
近几十年来,人们对连接式自主汽车(CAV)的研究越来越广泛。它被认为是促进道路交通安全进步的技术之一。CAV技术有望通过减少复杂环境中的人为错误来防止道路交通事故和死亡。为了了解CAV技术的性能,已经进行了大量研究。以前的研究主要集中在各种先进的驾驶员辅助系统,如避碰(例如盲点、前方碰撞和道路工程)、匝道合并控制、横向辅助(例如车道保持和车道变更辅助)、纵向速度控制(例如。,协同自适应巡航控制和连接式巡航控制)、交叉口辅助。
自2012年5月7日加州机动车管理局(DMV)批准美国第一个汽车驾驶执照以来,已有55家制造商和公司获得加州DMV的许可,在加州公共道路上测试CAV。加州车管所要求训练有素的人力驾驶员随时监控车辆的安全运行,并且必须能够在自动技术故障或其他紧急情况下接管立即控制权,无论自动级别如何。在测试期间,需要向加州车管所提交两类报告。第一类报告是关于涉及CAV的碰撞,无论严重程度或故障。另一个是关于脱离的,也就是将车辆控制权留给人类驾驶员的故障事件。
为了研究CAV技术的安全性能,最近进行了几项研究,以估计CAV涉及的碰撞率,并将其与正常碰撞率进行比较。到目前为止,关于CAV技术的安全性能的研究在以往的研究中发现了矛盾的结果。调查了谷歌、德尔福和奥迪的自动驾驶汽车测试程序报告的车祸率。结果表明,CAV的碰撞率是传统车辆的两倍以上。根据谷歌数据计算出每百万车辆行驶英里(VMT)的车祸率,并将其与警方报告的人类驾驶员车祸率进行比较。结果显示,谷歌汽车每百万辆VMT的警察报告车祸率远低于人类司机。谷歌自主汽车的碰撞率约为2.19次/百万VMT,低于人类驾驶者6.06次/百万VMT的正常碰撞率。将涉及CAV的碰撞率定义为每行驶英里的碰撞频率(即碰撞发生前总行驶英里数的倒数)。比较结果表明,CAV所涉及的碰撞率是正常碰撞率的10倍左右。现有文献中关于CAV技术安全性能的上述矛盾结果的可能原因可归结为两个方面。首先,来自不同公司和测试环境的车辆的固有性能的变化导致了不同的安全性能。其次,不同研究所选择的正常碰撞率基准有很大差异。例如,Teoh和Kidd(2017)中使用的正常碰撞率为每百万车辆英里(VMT)6.06次碰撞,而Favaro等人中使用的正常碰撞率。(2017年)为每百万VMT 2.0次碰撞。
以往的研究主要集中在比较CAV与传统车辆的碰撞率。目前尚不清楚各种影响因素是如何影响碰撞类型和严重程度的CAV所涉及的碰撞。为了填补这一研究空白,本研究旨在利用来自不同公司的碰撞报告,调查新兴CAV技术的碰撞特征和模式。更具体地说,这项研究的重点是回答以下问题:(a)与CAV有关的碰撞的特征是什么?(b)影响CAV碰撞类型的因素有哪些?;和(c)哪些因素导致CAV相关碰撞的严重程度?这项研究的结果有可能为工程师、设计师和规划者提供对自动驾驶安全方面的洞察。
- 数据源
加州车管所是一个州机构,负责登记机动车辆,发放许可证,并监督CAV的测试。作为DMV法规的一部分,拥有CAV测试许可证的公司必须在事故发生后10个工作日内提供涉及CAV的事故报告。本研究共使用了2015年1月至2018年6月期间72起涉及CAV的碰撞事故。从涉及CAV的碰撞报告中收集的信息包括碰撞严重程度、碰撞类型、碰撞时间、碰撞位置、自动驾驶车辆的驾驶模式、碰撞发生前的车辆移动和伤害。由于报告中存在较大的脱靶率,自主车辆和常规车辆的损伤程度以及碰撞前的车速未用于模型开发。
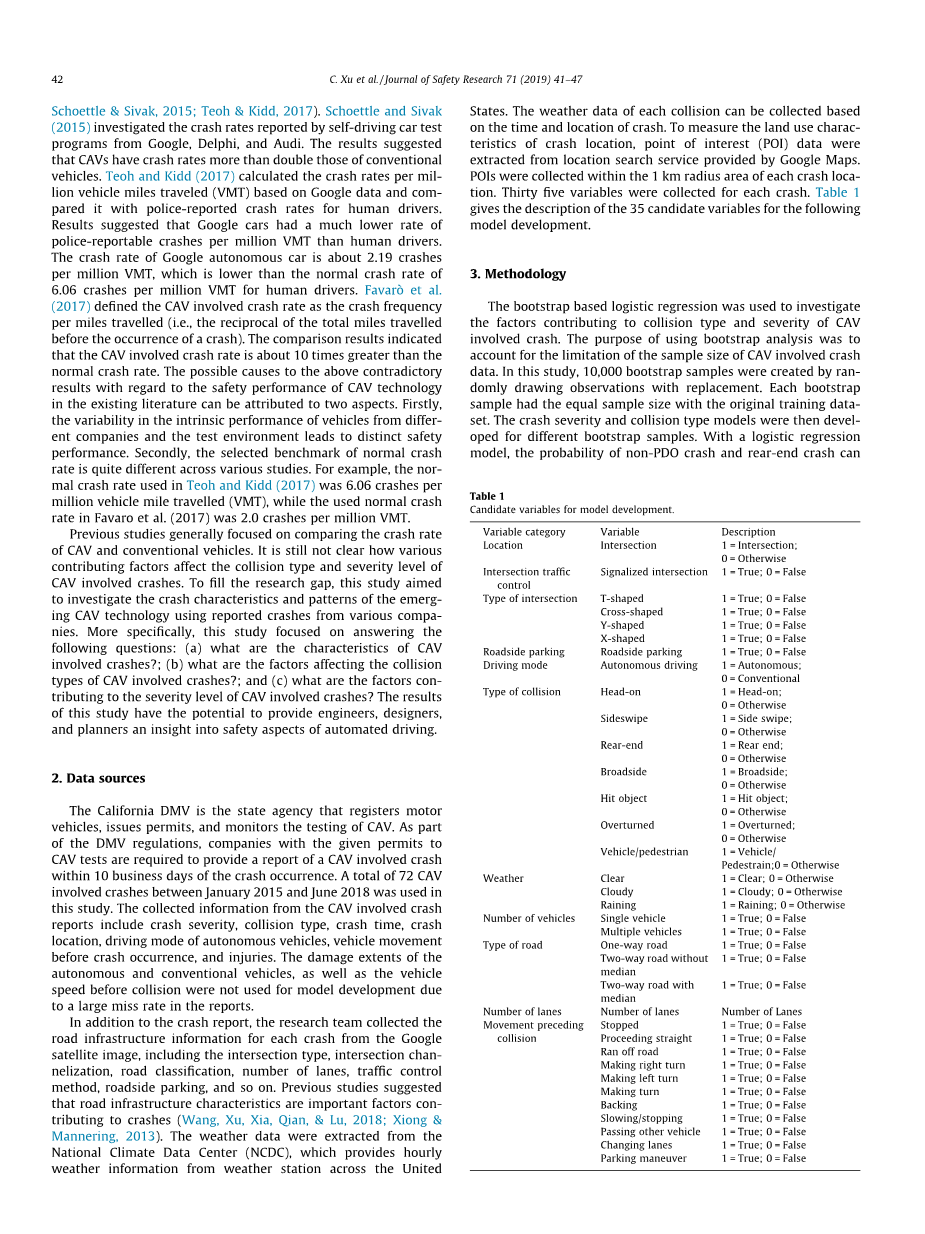
除了车祸报告,研究小组还从谷歌卫星图像中收集了每次车祸的道路基础设施信息,包括路口类型、路口渠化、道路分类、车道数、交通管制方法、路边停车等。先前的研究表明,道路基础设施特性是导致车祸的重要因素。这些天气数据是从国家气候数据中心(NCDC)提取的,该中心提供美国各地气象站每小时的天气信息。每次碰撞的气象数据可以根据碰撞的时间和地点进行采集。为了测量坠机地点的土地利用特征,从Google Maps提供的位置搜索服务中提取了兴趣点(POI)数据。在每个碰撞地点的1公里半径范围内收集泊松指数。每次碰撞收集35个变量。表1给出了以下模型开发的35个候选变量的描述。
表1模型开发的候选变量
|
可变类别 |
变量 |
说明 |
|
地点 |
交叉口 |
1=交叉口;0=其他 |
|
交叉口交通管制 |
信号交叉口 |
1=正确;0=错误 |
|
交叉口类型 |
T字型 |
1=正确;0=错误 |
|
十字交叉型 |
1=正确;0=错误 |
|
|
X字型 |
1=正确;0=错误 |
|
|
Y字型 |
1=正确;0=错误 |
|
|
路边停车场 |
路边停车场 |
1=正确;0=错误 |
|
驾驶模式 |
自动驾驶 |
1=自动式;0=传统式 |
|
碰撞类型 |
迎面相撞 |
1=迎面相撞;0=其他 |
|
侧面剐蹭 |
1=侧面剐蹭;0=其他 |
|
|
追尾 |
1=追尾;0=其他 |
|
|
侧面相撞 |
1=侧面相撞;0=其他 |
|
|
被物体击中 |
1=被物体击中;0=其他 |
|
|
被撞翻 |
1=被撞翻;0=其他 |
|
|
人车相撞 |
1=人车相撞;0=其他 |
|
|
天气 |
晴朗的 |
1=晴朗的;0=其他 |
|
不清晰的 |
1=不清晰的;0=其他 |
|
|
下雨的 |
1=下雨的;0=其他 |
|
|
车辆数量 |
一辆车 |
1=正确;0=错误 |
|
多辆车 |
1=正确;0=错误 |
|
|
道路类型 |
单行道 |
1=正确;0=错误 |
|
无中间带的双向道路 |
1=正确;0=错误 |
|
|
有中间带的双向道路 |
1=正确;0=错误 |
|
|
车道数 |
车道数 |
车道数 |
|
碰撞前的运动 |
静止 |
1=正确;0=错误 |
|
直行 |
1=正确;0=错误 |
|
|
疾驰 |
1=正确;0=错误 |
|
|
右转 |
1=正确;0=错误 |
|
|
左转 |
1=正确;0=错误 |
|
|
掉头 |
1=正确;0=错误 |
|
|
后退 |
1=正确;0=错误 |
|
|
减速/停止 |
1=正确;0=错误 |
|
|
超车 |
1=正确;0=错误 |
|
|
变线 |
1=正确;0=错误 |
|
|
停车操作 |
1=正确;0=错误 |
三、方法论
采用基于bootstrap的logistic回归分析,探讨了CAV碰撞类型和严重程度的影响因素。使用bootstrap分析的目的是解释CAV相关碰撞数据样本量的限制。在这项研究中,随机抽取10000个样本进行替换。每个bootstrap样本都具有与原始训练数据集相同的样本大小。然后针对不同的引导样本开发了碰撞严重性和碰撞类型模型。用logistic回归模型,非PDO碰撞和追尾碰撞的概率可以通过使用以下的方程式来计算。
(1)
其中P(xi)表示非PDO崩溃或重崩溃的概率,条件是发生崩溃和G(x)是解释变量的多重线性组合,可以表示为:
(2)
其中表示样本i的变量k值,bk表示变量k的系数。参数beta;1、beta;2、beta;3...beta;k可通过求解式(2)的对数似然函数来估计,式中:
(3)
四、数据结果和讨论
4.1.初步分析
图1给出了涉及CAV的碰撞频率的时间趋势以及涉及CAV的碰撞在不同公司中的分布。如图1(a)所示,自2014年以来,随着试验车辆的总VMT每年快速增加,涉及CAV的碰撞频率不断增加。图1(b)示出了各公司涉及的CAV事故的比例。通用克鲁斯(GM Cruise)在CAV事故中所占比例超过一半,其次是谷歌(Google)(33%)。另一家公司总共占CAV事故的10%。
在天气条件方面,90%以上的CAV事故发生在晴朗多云的天气条件下。在雨天条件下,CAV事故与正常事故的发生率没有显著差异。8.2%的CAV事故发生在雨天。在雨天条件下,测试地点发生正常碰撞的百分比为3.8%至9.1%,平均为5.5%。
(a)每年CAV碰撞频率
(b)不同公司的CAV碰撞
图1.CAV的分布涉及交通事故随时间和公司的变化。
图2显示出了涉及CAV的碰撞的发生位置。正如所料,大多数CAV事故发生在十字路口。这一结果直观地表明,交叉口的车辆运动和冲突比路段上的复杂得多。在20.5%的CAV事故中,城市街道占第二大比例。在发生在十字路口的交通事故中,在十字形十字路口的交通事故占58%,其次是在四个以上引道的十字路口的交通事故占17%,在T形十字路口的交通事故占15%。道路路边停车场也是影响交通事故发生地点的重要因素。结果发现,40%的CAV事故发生在有路边停车场的路段或交叉口。一个可能的原因是路边停车会影响对道路环境的感知,降低驾驶员的视线。
(a)事故场所的分布
(b)十字路口的分布
图2.CAV事故发生地点。
在碰撞发生前的驾驶模式和车辆运动方面,72起CAV碰撞中有51起在碰撞发生前处于自主驾驶模式,占全部样本的70.83%。因此,现在的司机似乎比机器更能应付紧急情况。图3示出了碰撞发生前的车辆移动。图3(a)和(b)给出了碰撞发生前CAV和传统车辆的移动百分比。发现最大百分比的CAV运动被停止,而最大百分比的传统车辆运动被发现是直线行驶。这表明,在相当多的CAV碰撞中,传统车辆撞到了CAV车辆的后部。一个可能的原因是CAV车辆在遇到危险情况时会突然发生故障,比如行人过马路。在这种情况下,下列常规车辆的驾驶员可能无法及时采取适当的操作,以避免与前面的CAV车辆发生碰撞。第二大比例的CAV和传统
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236426],资料为PDF文档或Word文档,PDF文档可免费转换为Word

