英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
配气机构运动学与动力学仿真
Eacute;derson Claudio Andreatta ,Robson Pederiva
摘要
在配气机构的设计过程中,预估其动力学性能有助于计算配气机构所受的载荷、应力以及减少摩擦损失。本文在凸轮的离散数据的基础上建立了运动学模型,同时建立了分段凸轮型线,而通过连续曲线我们可以预估配气机构的运动学特性以及评价各部件的位移,速度和加速度。根据运动学模型的计算结果,我们将凸轮旋转所产生的位移值作为动力学模型的输入值,从而通过考虑该多质量系统构部件的刚度和阻尼了解配气机构的振动特性并计算其所受载荷,应力和摩擦损失。
1引言
本文的主要目标是以MWM柴油发动机为原型建立一个可以预估四冲程3.2升发动机配气机构运动学与动力学特性的数学模型。本文研究的具体目标是通过使用多形式表示凸轮的几何形状,预估进排气门的升程、速度、加速度并与来自动力学模型的结果进行比较。
2凸轮的建模
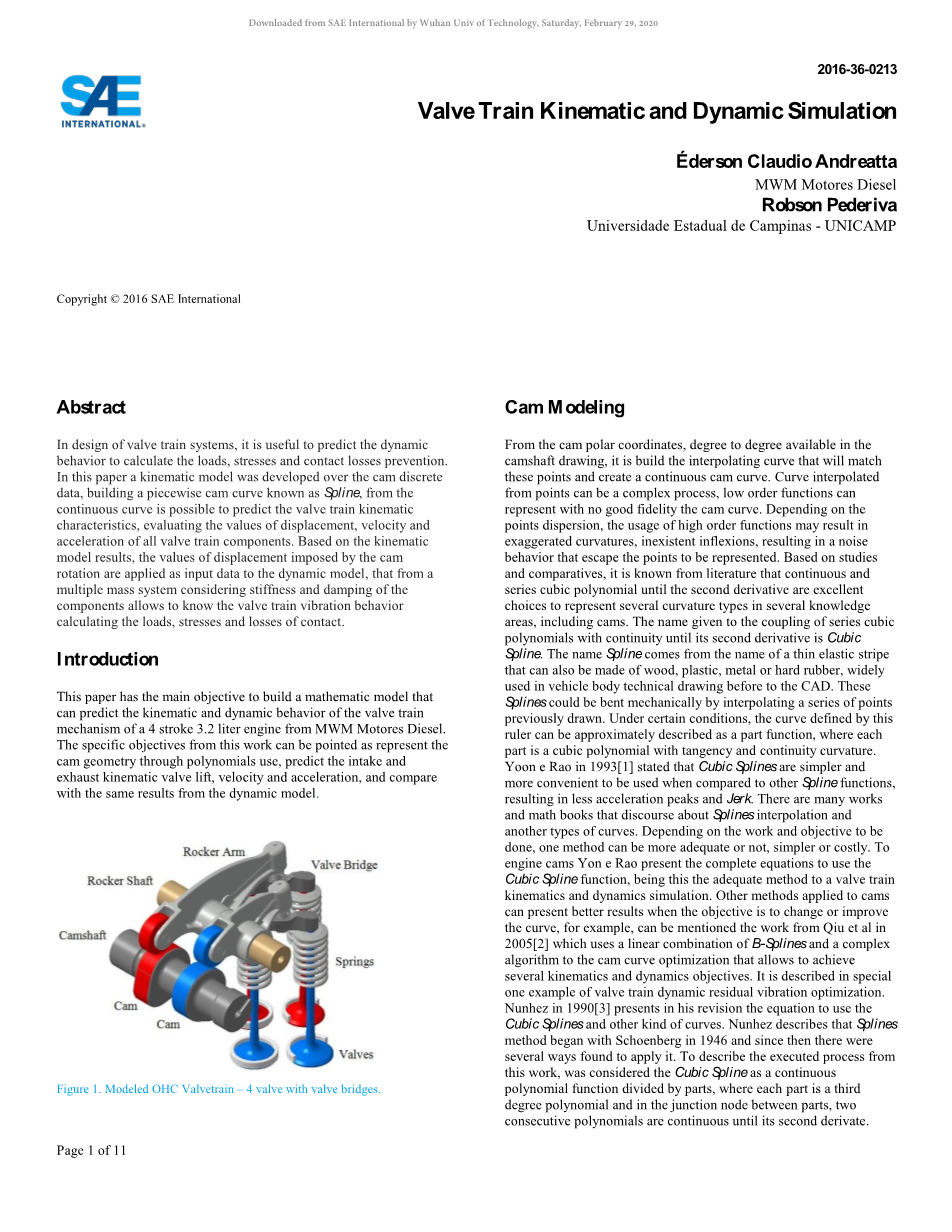
图1 带气门横臂的顶置式四气门配气机构模型
在凸轮轴的图像中通过极坐标逐度构建与各点相匹配的插值曲线并生成一条连续的凸轮型线。这些点的曲线插值是一个复杂的过程,低阶函数并不能很精确地表示凸轮型线。根据点地离散程度,使用高阶函数可能会造成曲率过大,拐点不存在的结果,进而跳脱出相应的点产生噪音。从相关文献的研究和比较中我们可以得知到其二阶导数均连续的一系列三次多项式是表示包括凸轮在内的多个领域中的多种曲线类型的最佳选择。这些三次多项式及其二阶导数合称“三次样条曲线”。“样条曲线”这一名字来源于一种可由木头、塑料、金属或者硬橡胶制成的弹性线条,在CAD出现之前广泛应用于汽车车身工艺绘制。这些“样条曲线”可以通过插值一系列提前绘制的点来实现机械弯曲。在一定条件下,由这种方法定义的曲线可以近似地描述为一个分段函数,其中每一个分段均是一个具有切线和连续曲率的三次多项式。Yoon e Rao在1993年[1]指出,与其他样条曲线相比,三次样条曲线更简单,使用更方便,从而减少加速度峰值和冲击。现今有许多关于样条曲线插值和其他类型曲线的著作和数学书籍。根据要完成的目标,采取的方法可以更充分,更简单或者更耗费精力。Yoon e Rao对发动机凸轮提出的利用三次样条函数的完整方程是配气机构运动学和动力学仿真的一种较为完善的方法。有些其它优化凸轮型线的方法有时会有更好的结果,例如,邱等人在2005年[2]的研究中使用了B样条的线性组合和复杂算法来优化凸轮曲线,从而实现多个运动学和动力学的研究目标。这是一种配气机构动力学残余振动优化的特殊示例。Nunhez在1990年[3]的修正中提出了使用三次样条和其他类型曲线的方程,据Nunhez描述样条法始于1946年的Schoenberg,之后发现了几种运用它的方法。为了描述本次研究的具体过程,我们将三次样条曲线看作是一个分段的连续多项式函数,每一个分段是一个三次多项式,并且在各分段的连接点上两个多项式函数到二阶导数均是连续的。设三次函数是样条曲线的某一分段,其定义域有:
,
考虑到三次样条曲线必须通过n个插值点或节点从而使其到二阶导数均连续,因此,我们在每个三次函数的每一端都有:
;,
因为每个三次多项式两端点一阶导数和二阶导数均连续,除了第一个和最后一个节点,对于每个三次多项式的一阶导数和二阶导数如下:
;,
我们注意到,因为系统在第一个和最后一个节点均表现出有两个自由度,所以对于样条函数的完整定义两个约束条件是必不可少的。我们可以通过设置第一个和最后一个节点的一阶导数以及二阶导数的特性来解决约束缺失的问题。假设两个节点的二阶导数均为零是一种被称作自然三次样条曲线的定义系统的方法。对于分段的自然三次样条曲线的第一个和最后一个节点有:
;。
图2 凸轮轴绘图中由极坐标逐次生成凸轮样条
3运动机构建模
在所研究的机构中,凸轮角和摇臂角之间的变化关系尚不清楚,由于很难找到凸轮和滚子之间的切点,要想弄清它们的关系需要进行大量计算。根据Doughty在1987年[4]的研究,研究这种带有滚子和从动件的机构需要一种数值求解法来求解相关问题。本研究的运动学模型没采用Doughty提出的数值求解法,而是采用三次方程的方程求解法[5]。在本研究的机构的凸轮旋转过程中,滚子的中心沿平行于凸轮型线的曲线运动,该曲线与凸轮型线间的距离为滚子的半径RR,则我们可以用一条平行于凸轮型线的曲线(称为DRR)来代替凸轮和滚子的运动,滚子的中心始终在该曲线上。如图3所示,简化的机构中不显示滚子:
图3 简化机构的中心滚子在凸轮上滑动的平行曲线RRD
要建立与凸轮平行的曲线,就需要计算凸轮型线中n个节点的导数值和,并发现平行曲线DRR上节点坐标有:
,
,
图4展示了凸轮平行曲线RRD的图形表达:
图4 由滚子半径RR建立的平行凸轮曲线RRD
在建立了与凸轮型线平行的样条曲线的基础上,摇臂旋转角beta;就可以通过关于凸轮旋转角omega;的函数计算得出。为了减少计算量,我们没有旋转凸轮,而是将摇臂绕着凸轮中心以固定的半径距离沿着与凸轮旋转相反的方向旋转。这就避免了我们一直在新的角度计算样条曲线。这种简化并不会改变运动的几何形状,而是重新选取了参考系。因此摇臂以等于omega;的角度逆时针逐度旋转,而摇臂中心CB绕着点CC以半径CC-CB做圆周运动,如图5所示:
图5 摇臂绕凸轮轴线中心旋转
摇臂的实际旋转角度beta;与角B相等,而角B是关于顶点CC,CR和CB所组成的三角形的函数。在这个三角形中由线段CC-CB和CB-CR构成的边是恒定的并由机构设计决定,然而线段CC-CR正如本仿真中的建模一样根据凸轮旋转角度的变化而变化,表达了摇臂中心CB绕凸轮中心CC旋转的函数关系。在确定摇臂的实际旋转角度beta;之前,必须逐度计算角度B,该角度是线段CC-CR值的函数。要想计算线段CC-CR的值,可以假设一个以CB为圆心以CB-CR为半径的圆,然后求出这个圆与平行凸轮曲线RRD的交点。该交点是先前未知的顶点CR。为了求出该交点,可令平行凸轮曲线RPD的函数与前文作出的圆的函数相等并求其根。求解交点的过程中将得到两个值,其中只有一个值是正确值。在所研究的模型中,所采取的方案是通过选取响应向量的最小值来在交点的两个有序数对中选出X坐标较小的那一个。由于摇臂的逆时针旋转我们选择了X坐标较小有序数对。确定了摇臂的角度曲线后,现在有必要确定气门开度曲线从而建立摇臂实际旋转角度beta;气门开度之间的关系。图6中我们考察了摇臂与气门之间的运动关系。点CT0对应着摇臂与横臂之间的球形连接中心。球形连接使得摇臂与横臂之间有着灵活的接触关系并且受气门中心线限制,所以摇臂可以绕其工作轴旋转而不与气门横臂发生干涉问题。CT点的初始位置称为CT0,由机构的设计决定,作为输入数据可通过三角计算得到或者在CAD模型中简单测量。CT点描述的是一绕CB点的圆形轨迹,然而为了计算气门开度我们需要知道CT点的纵坐标,该坐标正好对应气门开度值A。我们用CT点的水平位移来研究摇臂与气门横臂之间的相对滑动关系,但这不影响气门开度的运动学特性。
图6 气门开度An与摇臂旋转角度的关系
根据图6所示的直角三角形计算气门开度值。点CB、CT0,距离d,角、均为已知,所以只需计算向量的变化对应的气门开度值。通过气门开度曲线的两次求导,我们可以求出速度和加速度曲线,如图7所示:
图7 气门升程,速度,加速度
在计算了进、排气们的升程之后,我们还需要把他们和发动机的相位角进行匹配。配气相位在凸轮轴的图纸或者设计说明书中给出,而通过四冲程发动机旋转半周可以得知凸轮轴旋转角度omega;与曲轴旋转角度phi;之间的关系。图9展示了与发动机同步的气门升程曲线,0°和360°对应着与曲轴同步运动的活塞的上止点TDC,这种图象在气门升程图中很常见。值得注意的是,在许多发动机中,这些角度仅对应着曲轴轴颈与气缸中心线的对准,事实上活塞上止点有略微偏移,活塞销与气缸中心线发生偏移时往往就会发生上述情况。活塞销与气缸中心线的偏移称为销偏移,是降低活塞在气缸壁上爆震程度的一种实用方法。对于实际发动机中的气门升程检查,通常在气门开闭过程中升程为1.5mm时测量气门升程角,并与气门升程图中的规格进行比较。这是因为在气门升程为1.5mm时气门升程曲线斜率很低,从而使系统间隙和刚度引起的偏差最小化。在气门开闭斜线上进行测量会导致较大的角度偏差和测量误差。为了在气门升程为1.5mm时找到这些角度,有必要计算S(1.5)样条曲线的函数值。要想完成整个图像,绘制活塞顶面或活塞气门凹口顶面运动曲线以及研究活塞与气门之间的间隙均比较方便。要想确定活塞与气门间的最小距离还要求出活塞的位移,如图8中的曲柄连杆机构所示。在本研究的发动机中,活塞的上表面没有气门凹槽。在气门相对于气缸中心线倾斜的发动机中,加工气门凹槽的做法很常见。设计这些凹槽的目的是使在TDC附近的排气和进气升程曲线交叉,而不会使气门与活塞发生碰撞,并满足发动机设计标定的燃烧要求。
图8 活塞位移Z与曲轴转之间的关系
如图8所示,考虑到刚性曲柄机构没有轴承间隙,我们可以将活塞Z方向位移表达为曲轴转角phi;的函数:
通过计算出每个曲轴转角对应的活塞销轴线上的点的Z轴坐标,以及考虑曲轴轴线和曲轴箱间距,垫片厚度,我们由这些Z点绘制出了关于水平轴对称的曲线。上述计算中我们还考虑了汽缸盖底面到活塞顶面的距离,最后减去从活塞销中心到活塞上表面或气门凹槽处的距离,然后求出气门升程图的中活塞曲线。图9展示了经过上述计算后活塞曲线表示的气门开启曲线。
图9 气门升程曲线与活塞运动曲线
气门与活塞间的最小距离常常出现在上止点位置,有一定可能出现在排气门关闭前,进气门开启后,这是因为气门重叠角对达到燃烧要求至关重要。要找到气门和活塞之间的最小间隙,只需找到活塞曲线函数与气门升程曲线函数间差值的最小值。在发动机中,如果气门底面到活塞顶面之间的距离不同,或者活塞凹槽的深度值不同,则在绘制的图表中绘制两条活塞曲线,其中一条用于检查每个气门。最小允许间隙值由发动机制造商根据发动机类型和配气机构确定。与其它两个商业软件计算结果相比,本文计算的气门升程误差小于0.1%。将计算的加速度与商业软件进行比较,未发现明显的错误,如图10所示:
图10 运动学模型中排气加速度曲线与其他软件的比较
在运动学模型中,还可以计算加速度曲线的变化率,例如Jerk,在运动模型阶段通过分析加速度曲线与Jerk曲线表明需要优化气门开度曲线进而优化凸轮型线。在这项工作中,将计算出的Jerk曲线与另一商业软件的结果进行了比较,得到了令人满意的相关结果,如图11所示:
图11 运动学模型中排气冲击曲线与其他商用软件的比较
4动力学建模
此项研究的动力学模型有15个自由度,如图12所示,每个质量有一个自由度,其中参考系统是气门运动的轴线,因此摇臂旋转质量及其角刚度近似为气门轴线上的线性质量的运动和刚度。
图12 弹簧质量阻尼器弹簧图
在所研究的模型系统中有三个有效质量,一个质量主要由相当于系统质量38%的摇臂和两个气门质量,加上弹簧座、气门锁片、一个无弹性弹簧圈和相当于系统质量28%的四分之一横臂质量三部分组成。这三个质量的总和约为系统质量的94%,与气门质量相比,弹簧有低质量和低惯性。由于弹簧具有最低的系统刚度,与其他部件相比,其线圈之间的共振频率较低,并且在发动机高转速下显著影响系统响应。为了考虑这一影响,这些弹簧被分为八部分,每个部分代表一个自由度的弹簧圈,其中六个是每个弹簧中的活动弹簧圈,质量为第一个弹簧,质量为第二个弹簧。 上部非活动弹簧圈被添加到气门质量中,下部非活动弹簧圈被忽略,因为它没有线性运动,始终与气缸盖保持接触。图12中显示了动力学模型的质量、刚度和阻尼的完整分布。动力学模型的运动输入数据由运动学模型中气门轴线上A点的位移给出。为了计算气门摇臂在气门轴线上的等效质量,必须计算其在工作状态下以摇臂旋转轴为中心的转动惯量。在图13中,我们通过CAD软件观察在摇臂旋转轴上计算的转动惯量。
图13摇臂绕工作轴线的转动惯量
计算了摇臂转动轴上的转动惯量,并根据其角速度计算了其动能T:
对于气门参考轴上的等效平动动能,我们得到了摇臂等效质量及其等效线速度的函数:
对于角速度之间的关系,等效距离内的等效线性速度:
通过观察上述关系并令与T相等,我们得到了摇臂替代质量的等效值:
根据Wang【6】的说法,摇臂质量可以被认为是气门工作轴上的一个替代质量,相当于总摇臂质量的33%,利用上述方程式,通过平衡动能,排气摇臂得到27%,进气摇臂得到37%。在这个模型中,横臂质量分布在质量与之间,我们得到质量有:
质量是整个摇臂的等效质量加上横臂的一半质量。对于等效质量基本上包括气门质量、四分之一的横臂质量、弹簧固定器质量、气门锁片质量和非活动上部弹簧圈质量,有:
为了计算活动弹簧圈的质量值,使用CAD软件建立了弹簧模型,弹簧圈划分如图14所示。
图14 气门弹簧的六个活动弹簧圈和两个非活动弹簧圈
对于每个活动弹簧圈有:
同理第二个弹簧有:
在计算并确定了十五自由度系统的质量分布后,计算了摇臂、气门横臂和弹簧的刚度。根据前文,弹簧是系统中最灵活的部分。响应中未考虑零件接触刚度、凸轮轴及其轴承刚度、摇臂轴及其轴承刚度、弹簧固定器刚度和气门刚度,因此,我们对刚度的分布和计算如下:
摇臂的旋转改变了其相对于气门的角度,并改变了与凸轮的接触线,并且由于横臂上的应力与气门轴线的角度是变化的,所以其刚度是非线性的。在
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[235678],资料为PDF文档或Word文档,PDF文档可免费转换为Word

