
英语原文共 16 页
受电靴装置和导电轨系统的动力学分析
摘要
根据受电靴装置和接触轨的特点,可以将受电靴装置简化为具有旋转机构的悬臂,而轨道可以简化为简单支撑的欧勒-伯努利梁。假设它们之间没有分离,形成了受电靴装置和导电轨系统的统一动力学形成,即具有多个自由度的二阶偏微分方程。将受电靴装置和导电轨的模态位移代入拉格朗日动力学方程,可以得到模态坐标。根据系统的实际参数,结果表明,随着速度的增加,靴和导轨的振动更加强烈。根据受电靴装置的运动原理,可以根据振动试验中测得的参数建立有限元模型。同时获得导电轨有限元模型并不困难。然后根据实际参数对系统进行振动,可以通过数值积分方法求解。通过对滑板和导轨的接触力和振动加速度的分析,发现当速度超过120km/h时,接触状况急剧恶化,这表明在实际运行参数的情况下,受电靴装置和导电轨系统的推荐速度为120km/h。
关键词:导电轨 电动鞋 动力学分析
1、简介
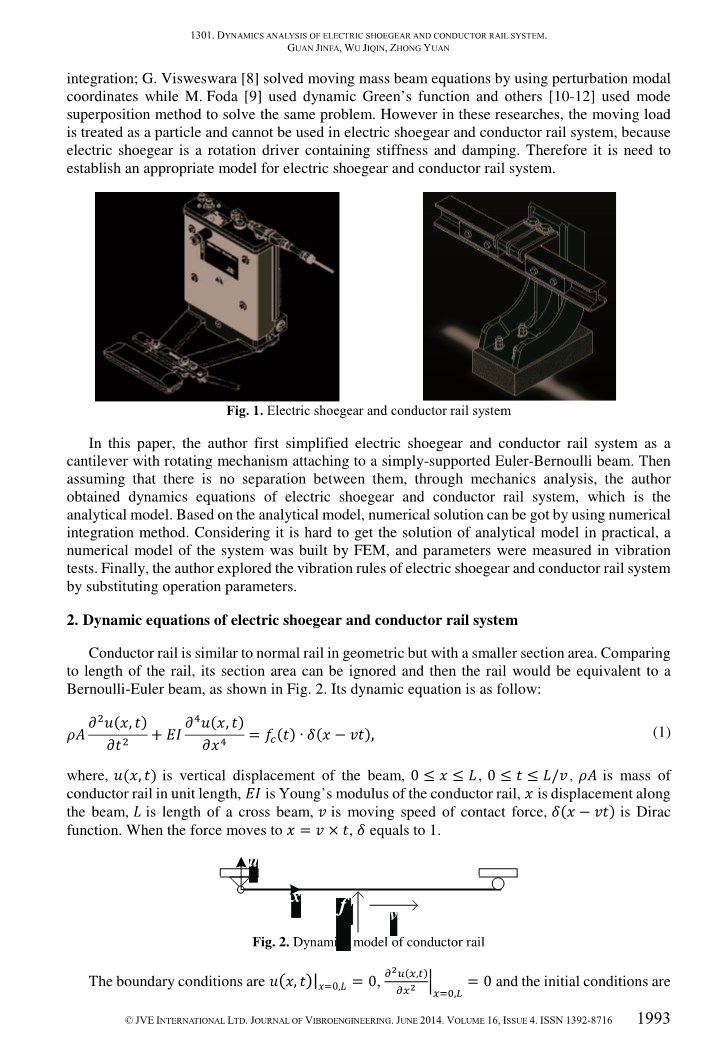
如图1所示的受电靴装置和导电轨系统是电动列车传统的牵引供电方式之一。自1890年世界上第一条铁路轨道铁路在伦敦开通以来,受电靴装置和导电轨系统已广泛应用于城市轨道交通,其最高时速已达到174km/h[1]。随着我国城市建设规模的不断扩大,原列车速度限制在80km/h,显然不能满足间隔长的要求。因此,必须开发一种允许运行速度达到120km/h甚至160km/h的系统。众所周知,较高的速度会使受电靴装置和导电轨系统产生更强烈的振动。由于靴和导轨之间的磨损,系统的使用寿命可能缩短,并且维护成本可能增加。如果受电靴装置与导轨分离,则可能由于不稳定的电能收集而导致诸如脱轨的严重问题。为了开发更高速度的受电靴装置和导电轨系统,需要研究其动态特性。
受电靴装置和导电轨系统的动力学研究很多:T.Teng[2]建立了受电靴装置和导电轨的多刚体模型,通过改变轨道平滑度和电动靴等参数,建立了系统的振动规律。P.F.Weston[3]得出了受电靴装置的位移与接触力之间的关系。然而,T.Teng[2]和P.F.Weston[3]都没有给出动力学方程。受电靴装置是移动设备,而导电轨是固定设施。在工作时,靴在导电轨上滑动,这相当于在梁上工作的移动负载。考虑到这种机制,有许多研究:J.Zhao[4]得到了移动载荷下梁振动的响应,但没有考虑惯性;Q.Chen[5]将移动质量的惯性作为附加的动态刚度矩阵,并通过Wittrick-Williams方法解决了梁的响应;V.Gasic[6]和B.Dyniewicz[7]使用有限元法(FEM)通过Newmark积分将控制方程引入动力学方程来解决接触力; G.Visweswara[8]利用摄动模态解决了运动质量束方程M.Foda[9]使用动态格林函数和其他[10-12]使用模态叠加方法解决了同样的问题。然而在这些研究中,移动负荷被视为粒子,不能用于受电靴装置和导电轨系统,因为受电靴装置是一种包含刚度和阻尼的旋转驱动器。因此需要建立适合受电靴装置和导轨系统的模型。
图1. 受电靴装置和导电轨系统
在本文中作者首先将受电靴装置和导电轨系统简化为悬臂梁,旋转机构连接在简支欧拉-伯努利梁上。然后假设它们之间没有分离,通过力学分析,作者得到了受电靴装置和导电轨系统的动力学方程,这是分析模型。在分析模型的基础上,采用数值积分方法得到数值解。考虑到实际求解分析模型的难度较大,有限元建立了系统的数值模型,并在振动试验中测量了参数。最后,作者通过替代运行参数,探讨了受电靴装置和导电轨系统的振动规律。
2、受电靴装置和导电轨系统的动力学方程
导体轨道几何形状类似于普通导轨,但截面积较小。与轨道长度相比,其截面积可以忽略不计,然后轨道将相当于伯努利-欧拉梁,如图2所示。其动力学方程式如下:
(1)
其中,是梁的垂直位移,,是单位长度的导电轨质量,是导电轨的杨氏模量,是沿着梁的位移,是横梁的长度,是接触力的运动速度,是狄拉克函数。当力移动到时,等于1。
图2.导电轨的动力学模型
边界条件是,;初始条件是,。
图3示出了受电靴装置作为悬臂连接到导电轨的草图,其扭力通过旋转轴供应。假设悬臂是质量杆结构:杆的一端有质量连接到导电轨。根据图4,受电靴装置的动力学方程如下:
(2)
其中是悬臂梁的初始旋转角度,是旋转刚度,是旋转阻尼,是悬臂的长度,是受电靴装置的等效质量,是初始接触力,。
图3. 受电靴装置的型号 图4. 受电靴装置的力分析
可以接受的是,假设受电靴装置的旋转非常小,这导致了。把它带入式(2),忽略受电靴装置的阻尼。式(2)可以改写:
(3)
受电靴装置和导电轨系统的简单接触模型如图5所示,弹簧引起的接触力使受电靴装置与导轨紧密接触。与受电靴装置的位移相比,可以忽略由于旋转而移除到线的中心。
图5. 受电靴装置和导电轨系统
受电靴装置在导电轨上滑动,因此可以设定受电靴装置和导轨始终保持在一起,因此可以得到:
(4)
对方程(4)式进行二次推导,然后:
(5)
将式(3)和式(5)代入式(1)得到:
(6)
式(6)是受电靴装置和导电轨系统的动力学方程。可以看出这是一个由2阶偏微分方程组成的2自由度系统,包括梁的振动和外部载荷。
3.动力学方程的解
在本文中,拉格朗日方程用于求解方程式(6)。首先,总的动能和系统的势能可以分别表示为:
(7)
(8)
假设受电靴装置和导轨的位移的功能如下:
(9)
(10)
将式(9)和式(10)代入式(7)和式(8),它得到:
(11)
(12)
由于形成的正交:
(13)
代入方程式(11)和式(12),可获得:
(14)
(15)
根据第二拉格朗日方程:
(16)
将式(14)和式(15)代入式(16),系统振动响应方程可以获得:
(17)
式(17)可以按顺序扩展和等效,这意味着有无限的自由度。由于可以按矩阵排列为:
(18)
将边界条件和初始条件代入方程式(18),使用Newmark-积分方法,获得的值,可以代入式(9)和式(10)得到了光束和粒子位移的动态响应。重新排列式(2)并将其代入式(10),接触力可以表示为:
(19)
Newmark积分方法基于加速度在两个时刻之间线性变化的假设。Newmark的标准形式的方程式:
(20)
(21)
公式(20)和(21)中的是集成时间。通常和的系数分别为0.25和0.5,因此在这种条件下,解是无条件收敛。详情可参考参考文献[13]。
4.分析模型的例子
解得方程式(18)相当于得到了第n型模态中坐标的自由度。以n = 3为例说明受电靴装置和导电轨系统的动态响应。
将表1中的参代入方程式(18)并将积分时间设定为1000,我们可以分别使用4.8m/s,24m/s和48m/s的速度计算,,,并将结果代入式(9)和式(10)得到受电靴装置和导轨位移的振动响应。然后可以通过将受电靴装置的位移代入式(19)来绘制接触力的响应曲线。
表1. 受电靴装置和导电轨系统的参数
|
参数 |
值 |
参数 |
值 |
当速度为48m/s时,很容易得到三个模态坐标并在图6中绘制第一和第二的模态坐标,。可以看出,第一模态坐标的幅度大于第二模型的幅度。
图6.48m/s时的模态坐标曲线 图7.48m/s时梁的不同位置的位移曲线
图7显示了速度为48 m/s时梁上三个不同点的位移曲线。我们可以看到,最大振动发生在0.5,最高为 5.6mm, 而0.75 的振动滞后于0.25 时的振动。考虑到图 6, 对于光束的位移响应, 第1个模态坐标贡献最大。
图8示出了在不同速度下光束中间点的位移。图9显示受电靴装置的轨迹,可以通过将模态坐标代入式(10)。比较图8和图9,注意到受电靴装置的轨迹与光束中点的位移相似。
图8.不同速度下梁中间的位移曲线 图9.不同速度受电靴装置的轨迹
根据式(19),可以绘制接触力曲线,如图10所示。当速度从4.8m/s增加到48m/s时,接触力的标准偏差从0.29N增加到2.5N。换句话说,接触力的波动变得剧烈。
图10.不同速度下的接触力曲线
5. 受电靴装置的振动测量及其建模
受电靴
资料编号:[4956]

