
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
容积卡尔曼算法
摘要:
本文提出了一种新的用于高维状态估计的非线性滤波器我们将其命名为容积卡尔曼滤波器(CKF)。CKF的核心是球形径向容积定律, 这使得数值计算非线性贝叶斯滤波器中遇到的多变量矩积分成为可能。具体地,我们导出了一个三阶球面径向容积定律,它提供了一系列与状态向量维数呈线性缩放的立方体点。因此,该方法可以为高维非线性滤波问题提供一个系统的解决方案。本文还包括推导一个平方根版本的CKF,以改善数值稳定性。CKF对两个非线性状态估计问题进行了实验验证。在第一个问题中,利用所提出的容积定律来计算非线性变换高斯随机变量的二阶统计量,第二个问题涉及到用于跟踪机动飞机的CKF。实验结果表明,与传统的非线性滤波器相比,该滤波器具有更好的性能。
关键词:贝叶斯滤波器,容积定律,高斯正交规则,不变理论,卡尔曼滤波,非线性滤波。
一 引言
本文研究了一类具有加性噪声的非线性动力系统的滤波问题,其空间状态模型是由离散时间中的一对差分方程定义的[1]。
过程方程:
(1)
测量方程:
(2)
其中Xk是动态系统在离散时间的状态,f和是已知的函数,是已知的控制输出,如图1所示,它可以由补偿器导出;是测量值;和是独立的过程和测量高斯噪声序列,具有零均值和协方差和
在贝叶斯滤波范式中,状态的后验密度为当时的状态提供了完整的统计描述。在收到一次新的测量后,我们将按两个基本步骤更新时间状态的旧的后验密度。2008年7月2日收到手稿;2008年7月2日、2008年8月29日和9月16日修订。第一次出版于2009年5月27日;当前版本于2009年6月10日出版。这项工作得到了自然科学和加拿大工程研究委员会的支持。作者与汉密尔顿麦克马斯特大学电气和计算机工程系认知系统实验室合作。本文中的一个或多个图形的颜色版本可在其他网站上在线获得。
时间更新,包括计算预测密度:
(3)
其中表示了输入测量对到时间(k-1)的进程,P(Xk-1 Dk-1)是时间(k-1)上的旧后验密度,状态转移密度P(Xk Xk-1,Uk-1)是从(1)得到的
测量更新,包括计算当前状态的后验密度
利用状态空间模型(1)、(2)和Bayes规则得到:
(4)
其中,规范化常数是由
(5)
为了在(4)中建立预测密度和后验密度之间的递推关系,输入必须满足这种关系:
这也被称为控制的自然条件[2]。因此,这个条件表明Dk-1有足够的信息来生成输入Uk。具体来说,可以使用Uk生成输入Uk k-1。在这种情况下,我们可以等效地写:
(6)
因此,用(5)代入(4)得到
(7)
如所需,在
(8)
并从(2)中得到了测量似然函数,
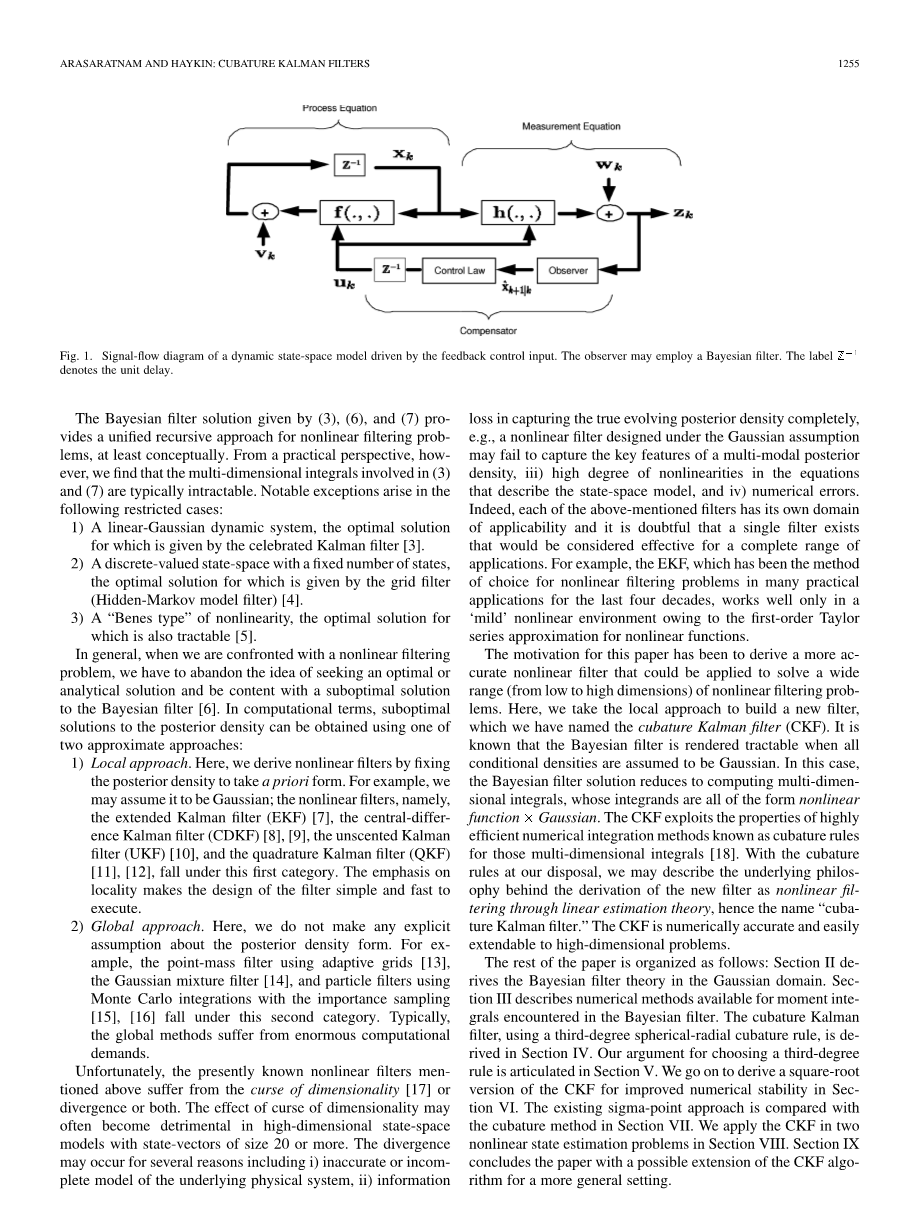
图1.1 由反馈控制输入驱动的动态状态空间模型的信号流图
观察者可以用贝叶斯滤波器。标签表示单元延迟(3)、(6)和(7)给出的贝叶斯滤波解至少在概念上为非线性滤波问题提供了一种统一的递推方法。然而,从实际的角度来看,我们发现(3)和(7)中涉及的多维积分通常是难以处理的。在下列受限制的情况下出现了明显
例外情况:
(1)线性高斯动态系统,其最优解由著名的卡尔曼滤波器给出[3]。
(2)固定状态数的离散值空间状态,其最优解由网格滤波器(隐马尔可夫模型滤波器)给出[4]。
(3)非线性的“Benes型”,其最优解也是可处理的[5]
一般情况下,当我们遇到非线性滤波问题时,我们不得不放弃寻求最优解或解析解的思想,而寻找满足于贝叶斯滤波器[6]的次优解。在计算方面,可以使用以下两种近似方法中的一种获得后验密度的次优解:
(1)狭义办法。这里,我们通过将后验密度固定为先验形式来导出非线性滤波器。例如,我们可以假设它是高斯的;非线性滤波器,即扩展卡尔曼滤波器(EKF)[7],中央差分卡尔曼滤波器(CDKF)[8-9],无迹卡尔曼滤波器(UKF)[10]和正交卡尔曼滤波器(QKF)[11-12]都属于这一类。由于对局部的强调,使得滤波器的设计简单快捷。
(2)广义办法。在这里,我们没有对后验密度形式作任何明确的假设。例如,采用自适应网格的点质量滤波器[13]、高斯混合滤波器[14]和具有重要性抽样[15-16]的蒙特卡罗积分的粒子滤波器属于第二类。通常,全局方法面临着巨大的计算需求。
不幸的是,目前已知的上述非线性滤波器受到阶数[17]或发散的问题,或两者兼而有之。在高维状态空间模型中,当状态向量为20或更大时,维数的影响往往会变得有害。发散可能是由于以下几个原因造成的:
(1)底层物理系统模型不准确或不完整;
(2)完全捕获正确的展开后验密度时的信息丢失,例如,在高斯假设下设计的非线性滤波器可能无法捕捉多模后验密度的关键特征,
(3)描述状态空间模型方程的高度非线性;
(4)数值误差。事实上,上面提到的每个过滤器都有自己的适用范围,是否存在一个能够被认为对整个应用程序有效的单一过滤器,这是值得怀疑的。例如,由于非线性函数的一阶泰勒级数逼近,EKF在过去四十年的许多实际应用中一直是非线性滤波问题的选择方法,它只在“温和”非线性环境下才能很好地工作。
本文的目的是推导出一种更精确的非线性滤波器,用于解决非线性滤波问题的大范围(从低维到高维)。这里,我们采用局部方法来构造一个新的滤波器,我们把它命名为容积卡尔曼滤波器(CKF)。已知,当所有条件密度都假定为高斯时,贝叶斯滤波器是可处理的。在这种情况下,贝叶斯滤波器解简化为计算多阶积分,其积分都是非线性函数X高斯的形式。该方法利用了多维积分的高效数值积分方法-容积规则的性质[18]。通过线性估计理论,我们可以将新滤波器推导为非线性滤波背后的基本思想称为“容积卡尔曼滤波器”。该方法数值精确,易于扩展到高阶问题.
第二节推导了高斯域的贝叶斯滤波理论。第三节描述了适用于贝叶斯滤波器中矩积分的数值方法。第四节给出了利用三阶球面径向积分准则的卡尔曼滤波公式.我们关于选择三阶规则的论点在第五节中得到了阐述。我们继续推导出第六节中改进数值稳定性的CKF的平方根版本。将现有的sigma;点法与第七节中的立方体法进行了比较.在第VIII节中,我们将该方法应用于两个非线性状态估计问题。第九节结束了本文的结论,并可能扩展了CKF算法,使其具有更一般性。
二 高斯域贝叶斯滤波理论
在高斯区域下发展贝叶斯滤波理论的关键逼近是预测密度和滤波似然密度都是高斯的,这最终导致高斯后验密度。高斯密度函数是最方便和广泛使用的密度函数,原因如下:它具有许多独特的数学性质。
-高斯族在线性变换和条件下是封闭的。
-不相关的联合高斯随机变量是独立的。
·它借助概率论的中心极限定理近似许多物理随机现象(详见[19]第5.7和6.7节)。在高斯近似下,贝叶斯滤波器的函数递推简化为仅在时间和测量更新中所遇到的各种条件密度的均值和协方差上的代数递归。
A时间更新
在时间更新中,贝叶斯滤波器计算高斯预测密度的平均和相关协方差如下:
(8)
其中E是统计期望算子。将(1)带入(8)得
(9)
由于被假定为零均值,并且与过去的测量值不相关,所以我们得到:
(10)
其中是高斯密度的常规符号。同样,我们得到了误差协方差。
(11)
表1 卡尔曼过滤框架
|
|
更新协方差 |
|
|
更新 |
|
|
卡尔曼增益 |
B测量更新
众所周知,预测测量中的误差是零均值白色噪声 [2][20]。 在假设下我们可以很好地近似这些误差写出滤波器似然密度
(12)
预测的测量值
(13)
和相关的协方差。
(14)
因此,我们写了条件高斯密度的联合状态和测量。
(15)
其中交叉协方差
(16)
在收到新的测量Zk时,贝叶斯过滤器 服从(15)计算后验密度
(17)
即得到
(18)
(19)
(20)
如果和是状态的线性函数,则高斯假设下的贝叶斯滤波器简化为卡尔曼滤波器。表一显示了在卡尔曼滤波框架中如何调用上述导出的量。
图2总结了以下步骤涉及贝叶斯滤波器的递归循环。关键是贝叶斯滤波器是如何计算高斯加权积分的,其积分是所有形式的非线性函数X高斯密度存在于(10)、(11)、(13)、(14)及(16)中。下一节描述了数值计算多维加权的积分方法积分。
图2 高斯假设下递归贝叶斯滤波器的信号流图,其中“G-”代表“高斯-”
。
三 矩积分数值方法综述
考虑
(21)
型的多维加权积分,其中是任意函数,是积分区域,而已知的加权函数代表所有。例如,在高斯加权积分中,是一个高斯密度,满足整个区域的非负性条件。如果很难得到上述积分(21)的解,我们可以寻求数值积分的方法来计算它。数值计算分(21)的基本任务是找到一组点和加权,它用函数求值的加权和逼近积分
(22)
用于查找的方法可分为产品规则和非产品规则,如下所述。
A乘法规则
对于最简单的一维情形(即,n=1),我们可以应用求积规则来计算积分(21)数值[21-22]。在贝叶斯滤波器的背景下,我们提出了高斯-埃尔米特求积规则,当加权函数为高斯密度且积分被多项式很好地逼近时,采用高斯-埃尔米特求积规则有效地计算高斯加权积分[12]。在一维积分的张量积中,可将求积规则推广到多维积分。考虑一个M点每阶求积规则,它是精确的多项式的程度。我们建立了一个函数求值的点网格,数值计算了n维积分,同时只保留了D阶多项式的精度。因此,乘积求积规则的计算复杂度随维数的增加呈指数增长,因此受到维数的影响。通常,对于,高斯-埃尔米特求积求积规则不是逼近递归最优贝叶斯滤波器的合理选择。
B非积规则
为了缓解产乘法规则中维数问题,我们可以通过直接从积分[18][23]中选择点来寻求任意维积分的非乘积规则。一些著名的非乘积规则包括随机蒙特卡罗方法[4]、准蒙特卡罗方法[24-25]、格律[26]和稀疏网格[27-29]。随机蒙特卡罗方法使用一组随机抽取的等权样本点来评价积分,而在准蒙特卡罗方法和规则中,点是由单位超立方体区域使用确定性机制生成的。另一方面,基于Smolyak公式的稀疏网格在原理上结合了高阶积分的求积(单变量)例程,自动检测重要尺寸,并在其中放置更多的网格点。虽然这里提到的非乘积方法是计算给定积分的强大的数值积分工具,但它们确实在一定程度上遭受了维数的困惑[30]。
C推荐方法<!--
全文共8348字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1248]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

