英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
主动悬架系统的行驶状态自适应控制
1
Guido Koch和Tobias Kloiber
摘要:本文提出了一种新的自适应车辆悬架控制方案,该方案实现控制器参数化来适应当前的驾驶状态,从而能够显着提高乘坐舒适性,同时,动态车轮载荷和悬架偏转保持在安全临界范围内。为此,自适应控制器结构在由动态车轮负载和悬架偏转所支配的不同调谐的线性二次调节器之间动态插值。考虑到悬架系统的非线性阻尼特性,通过普遍的Lyapunov函数法分析了自适应控制器结构的稳定性。为了给控制器设计和性能分析提供一个真实的框架,基于全地形车辆悬架的四分之一车的试验台采用电动直线电机来进行主动悬架系统试验台的测试。在这个测试平台上,通过自适应控制概念的显着性能与基准悬架控制器的比较,成功验证了方案。
关键词 : 主动悬架系统,自适应控制,开关控制,车辆动力学,车辆悬架控制
一.介绍
悬架系统传递车辆与道路之间的压力,是决定了乘坐舒适性和乘坐安全性的主要因素。 悬架系统的动态行为关系着影响车辆的处理能力,即系统性能的改善不仅正面地影响驾驶员对车辆的主观印象,而且还可以通过增加驾驶员的权限而降低交通死亡事故的车辆数并防止驾驶员的身体疲劳。
乘坐舒适性和乘坐安全性受车辆垂直动态特性的控制。如果假设四个车轮的运动是解耦的,并且悬架动力学仅在垂直车辆动力学(0-25Hz)的感兴趣的频率范围内考虑,则熟知的四分之一车模型代表适当的建模框架[1]。 它描述了非悬挂质量mw(代表轮胎质量,车轮,制动器,轮架和悬架系统部件)和悬挂质量mc(主要由(四分之一的底盘质量,包括乘客和车辆有效载荷),它们通过悬架系统连接。 此外,四分之一车型还包括一个轮胎模型,该模型通常由平行弹簧和阻尼器配置来表示。
手稿于2011年12月21日收到; 2012年11月16日修订; 2012年12月14日接受。2013年1月13日以最终形式收到手稿。发布日期2013年2月11日; 当前版本的日期2013年12月17日。副编辑S. M. Savaresi推荐。G. Koch与斯坦福大学动态设计实验室,美国加利福尼亚州斯坦福94305(电子邮件:guido.koch@googlemail.com)。
G. Koch与斯坦福大学动态设计实验室,美国加利福尼亚州斯坦福94305(电子邮件:guido.koch@googlemail.com)。
T. Kloiber与德国Garching 85748慕尼黑工业大学自动控制研究所(电子邮件:tobias.kloiber@tum.de)联系。
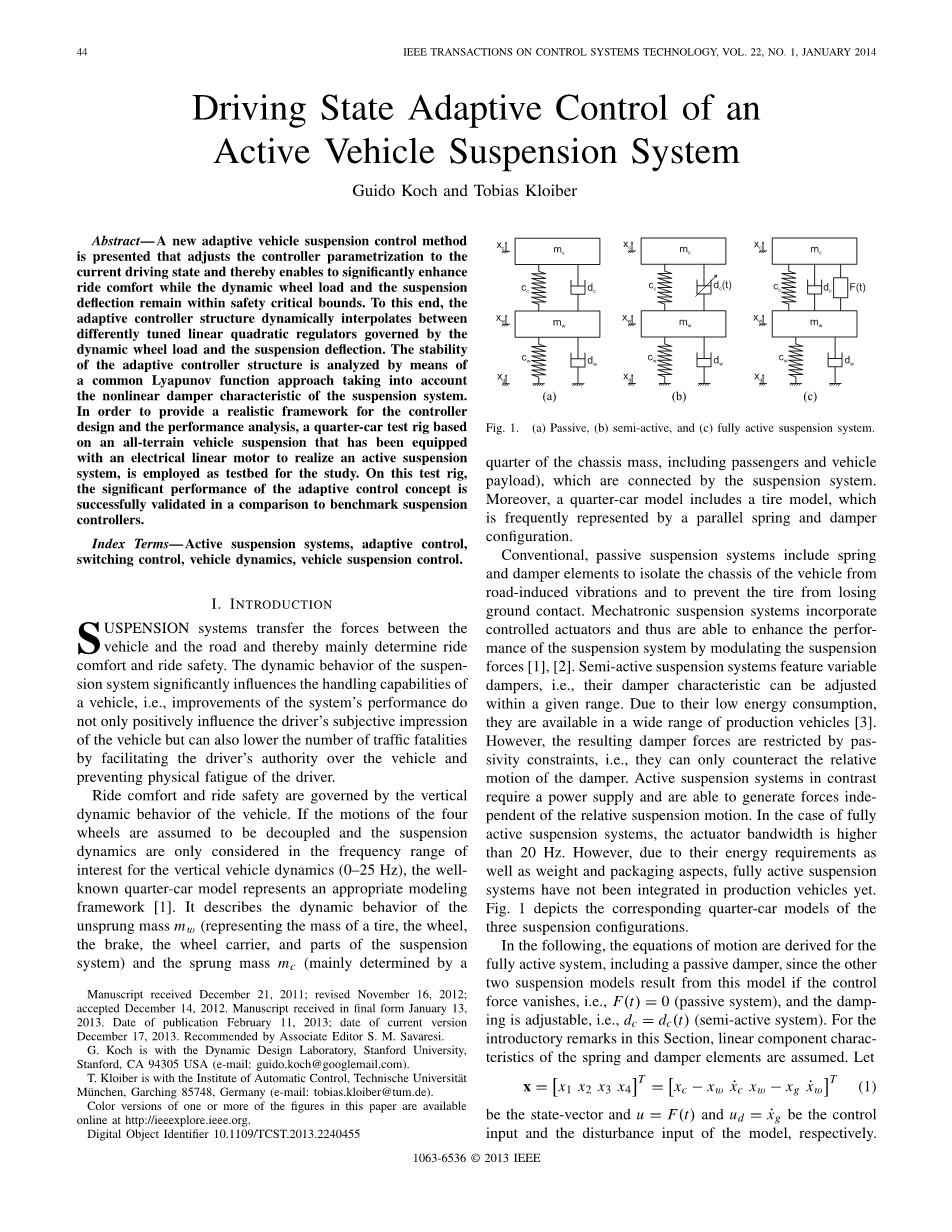
图1.(a)被动(b)半主动(c)完全主动悬挂系统
常规的被动悬架系统包括弹簧和阻尼元件,用来将车辆的底盘与道路引起的振动隔离并防止轮胎失去与地面的接触。机电一体化悬架系统包含受控制的执行器,因此可以通过调节悬架力来提高悬架系统的性能[1],[2]。半主动悬架系统具有可变阻尼器,即其阻尼器特性可在给定范围内调整。由于其能耗较低,因此可用于各种生产车辆[3]。然而,由此产生的阻尼力受到无源性约束的限制,即它们只能抵消阻尼器的相对运动。相比之下,主动悬架系统需要电源并且能够产生独立于相对悬架运动的力。在完全主动悬架系统的情况下,执行器带宽高于20 Hz。然而,由于其能量需求以及重量和包装方面的原因,完全主动的悬架系统还没有被整合到生产车辆中。图1描述了三种悬架配置的相应四分之一车型。
在下文中,运动方程由包括无源阻尼器在内的完全有效系统导出,因为如果控制力消失(即,F(t)= 0(被动系统)),则另外两个悬架模型由该模型产生, 并且阻尼是可调的,即dc = dc(t)(半主动系统)。 对于本节的介绍性说明,假定弹簧和阻尼元件的线性分量特性。
x =x1 x2 x3 x4T = xc minus; xw x˙c xw minus; xg x˙wT (1)是状态向量,u = F(t), ud = x˙g是控制输入和扰动输入模型。
输出矢量y = xuml;c Fdyn xc - xw T(2)
包括悬架性能的相关变量,特别是表示动态车轮载荷的
Fdyn = cw(xg -xw) dw x.g- x.w
四分之一车模型可以表示为线性状态空间模型。
⎡x˙1⎤=⎡ 0 c 1 c 0minus;c1 ⎤⎡x1⎤ cd
⎢x˙2⎥ = ⎢minus;mc minus;mc 0 mc ⎥⎢x2⎥
⎢x˙3⎥= ⎢ 0c 0c 0 c1 ⎥⎢x3⎥
⎣x˙4⎦= ⎣ mcw mdw minus;mcww minus;d m wdw ⎦⎣x4⎦
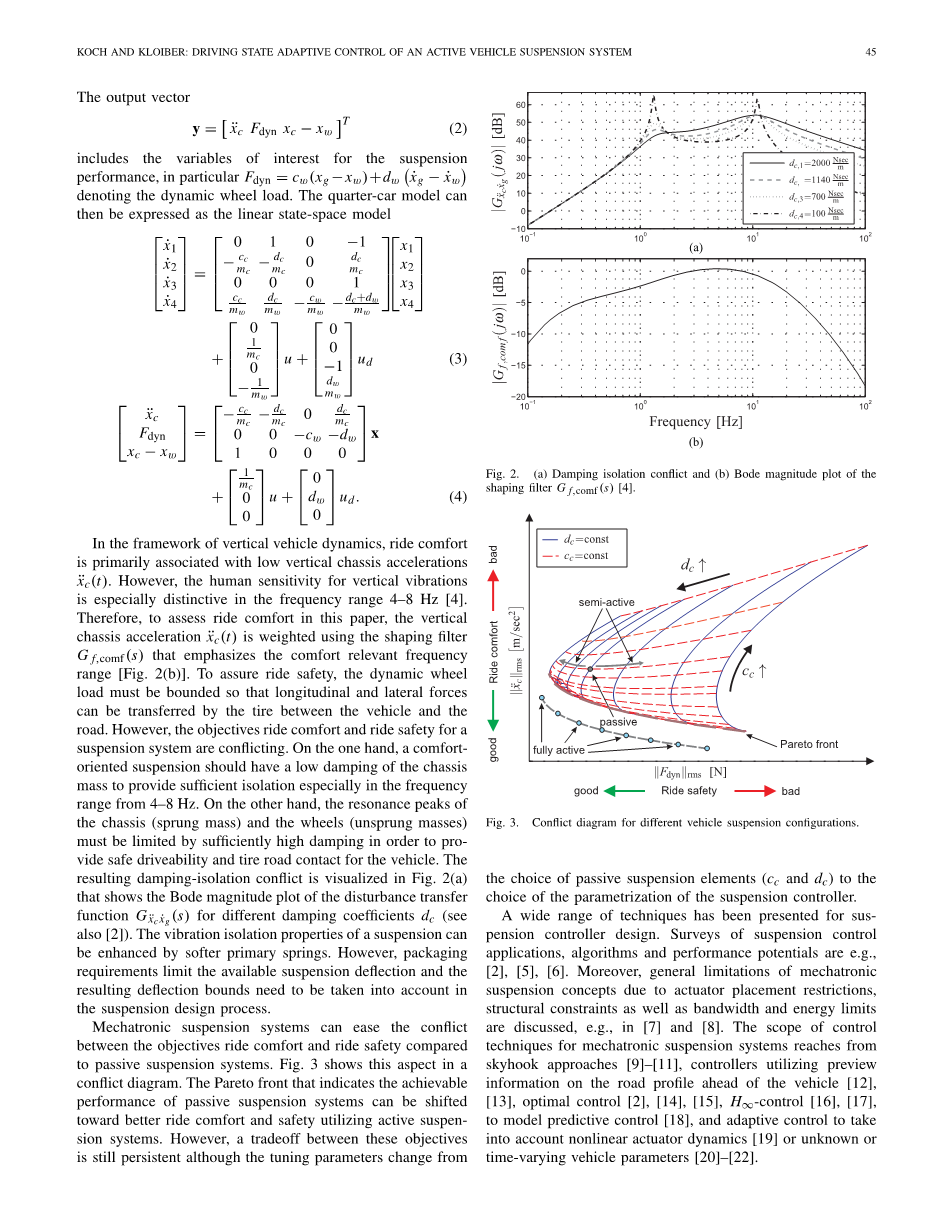
在垂直车辆动力学框架中,乘坐舒适性主要与低垂直底盘加速度x-c(t)有关。 然而,人们对垂直振动的敏感度在4-8 Hz的频率范围内尤其明显[4]。 因此,为了评估本文中的乘坐舒适性,垂直底盘加速度xuml;c(t)使用强调舒适相关频率范围的整形滤波器G f,comf(s)进行加权。[图2(b)]。 为了保证行驶安全,动态车轮载荷必须是有界的,以便车辆和道路之间的轮胎能够传递纵向和侧向力。 但是,悬架系统的目标与舒适性和乘坐安全性是相矛盾的。 一方面,舒适型悬架应该具有低底盘质量的阻尼,以提供足够的隔离,尤其是在4-8Hz的频率范围内。另一方面,底盘(簧上质量)和车轮(簧下质量)的共振峰值必须受到足够高的阻尼限制,以便为车辆提供安全的驾驶性能和轮胎路面接触。 图2(a)显示了由此产生的阻尼 - 隔离冲突,该图显示了不同阻尼系数dc(参见[2])的扰动传递函数Gxuml;cx·g(s)的Bode幅度图。 较软的主弹簧可以增强悬架的隔振特性。 然而,包装要求限制了可用的悬架偏转,并且在悬架设计过程中需要考虑产生的偏转界限。
图2.(a)阻尼隔离冲突 (b)成形滤波器G f,comf(s)的波特幅度图[4]
图3
与被动悬架系统相比,机电一体化悬架系统可以缓解目标乘坐舒适性和乘坐安全性之间的冲突。图3中显示了这个方面。 表明了被动悬架系统的可实现性能的帕累托前锋可通过主动悬架系统转向更好的乘坐舒适性和安全性。 然而,尽管调谐参数从被动悬架元件(cc和dc)的选择改变为悬架控制器参数化的选择,但这些目标之间的选择仍然存在。
广泛的用于悬架控制器设计的技术已经被提出。 悬架控制应用,算法和性能潜力的调查例如[2],[5],[6]。 此外,例如在[7]和[8]中讨论了由于驱动布置限制,结构约束以及带宽和能量限制而导致的机电悬架概念的一般局限性。 机电一体化悬架系统的控制技术范围从天窗方法[9] - [11],利用车辆前方道路轮廓预览信息的控制器[12],[13],最佳控制[2] [14] ,[15],Hinfin;控制[16],[17]模型预测控制[18]和自适应控制考虑到非线性执行器动态[19]或未知或时变车辆参数[20] - [22]。
在早期进行悬架控制(例如[5,23,25])方面的工作,已经指出了充分利用集成执行器提供的灵活性的潜在方法:根据悬架偏转自适应地调整控制器参数或动态车轮载荷,并由此根据车辆的行驶状态改变悬架调谐。在文献[26]中,Venhovens提出了一种根据车轮负载自适应悬架控制器,该控制器安排在舒适性聚焦天棚阻尼常数和驾驶安全性定向被动阻尼配置之间。 [26]中使用的适配逻辑的结构作为本文中检测驾驶状态临界性的逻辑的基础。在文献[27]中,提出了一种根据悬架偏转来调整非线性滤波器的参数化的方法,该方法在不同的控制器设置之间调度,以防止超出悬架偏转限制,否则影响乘坐舒适性。 [28]和[29]中介绍的线性参数变化悬架控制器提供了类似的功能。 Lu [30]通过简单的类似模糊逻辑的方案,提出了混合H2 /Hinfin;多目标控制器之间的道路激励主频率分量估计方案。此外,已经提出了考虑控制器适应轮胎打滑[31]或道路感应振动本身或道路情况调整其动态特性地自适应系性的方法[32],[33]。在前面提到的所有工作中都指出了快速自适应悬架系统的性能潜力,该系统的稳定性很少被详细讨论,所提出的仿真是基于线性悬架模型,并且没有进行实验验证。
- (b)
(c) (d)
1.值得注意的是,所提出的技术也可以应用于缓慢的主动或半主动机电一体化悬架系统。
图4.(a)实验车辆(b)左前悬架(c)试验台结构(d)试验台。
本文提出了一种控制方法,机电一体化悬架系统的能力是通过根据当前驾驶情况动态调整控制器参数。为此,设计了自适应控制器结构,它是根据动态车轮负载和悬架偏转指定的当前行驶状态来调度控制器参数。由此产生的快速自适应悬架可以最大限度地提高乘坐舒适性,只要动态车轮负载和悬架的约束不会被违反。为了突出由控制概念引起的改进,而不是分析执行器约束的局限性,本文选择了一个完全主动的悬架配置作为硬件架构。[注意,所提出的技术也可以应用于缓慢的主动或半主动悬架,主动机电一体化悬架系统。]所提出的控制器设计方法代表了作者[34]以前的概念的增强,已经在线性模型中进行了仿真测试。本文论述的主要新方法是在控制器设计中要考虑的方面,以保证系统的稳定性以及实际框架中的实验性能验证。对于线性二次调节器(LQR)的基于优化的调节,采用了详细的非线性四分之一车辆模型。为了评估控制器性能,所提出的概念与已建立的基于天钩的控制策略以及传统的线性二次最优控制器进行比较。有关结果的更详细介绍,请参阅[35]。
本文的其余部分的结构如下。 在第二部分中,介绍了用于实验验证的四分之一车试验台,并详细阐述了机电悬架系统的要求。 第三部分推导了所考虑的悬架系统和执行器的实际模型。 第四部分介绍了稳定性方面,基于优化的控制器参数化以及其性能潜力分析。 在第五部分中对比基准系统讨论了控制器性能的实验验证。
二.四轮试验台和系统要求
A.四分之一车试验台
该试验台基于全地形车(ATV)[图4(a)]悬架系统,因为该车辆具有类似于汽车的悬架结构,但其具有相当低的质量,这简化了主动悬架系统的设计。左前悬架已经集成在测试台结构中[图4(c)]和一个力控定制,无铁,永久激励的同步电动直线电机已安装在代表底盘质量的垂直导向板和车轮之间,利用第二电动线性电动机通过垂直激励轮胎来模拟道路引起的振动。主动悬架系统采用的传感器架构代表现代生产车辆的配置,并包含用于垂直底盘和车轮加速度的加速度计以及用于悬架偏转的钢丝绳致动位置传感器(WRAPT)。还测量与执行器力成比例的悬架执行器的电流。只有这些传感器用于本文中介绍的悬架控制和估算任务。此外,测试台配备有力传感器,用于测量性能评估的动态车轮负载。采用频率为fs = 1 kHz的实时控制器板用于实现控制器。在[35]和[36]中给出了更多关于试验台的技术细节。
- 道路干扰输入
一般而言,公路会引起过往车辆的随机振动(参见[1]和[2]以获得关于道路振动特性的更详细讨论)。 为了提供一个关于本文激励信号的真实框架,真实道路剖面的测量被用于模拟和实验。 在德国两条乡村道路上,配备有激光扫描仪的测量车辆记录了所考虑的道路情况。 轮廓P1导致大的悬架偏转,而轮廓P2主要包含高频分量。 除了随机信号之外,还有单一的干扰事件,例如颠簸对车辆的行驶安全性以及驾驶员对乘坐舒适性的感知有重大影响。在[1]中给出了一个由奇异扰动事件产生的垂直道路位移xg(t)的简单模型。
xg(t) = h 1minus;cos 2pi;v t, L bfor 0, t Lle; vb (5)
其中h代表颠簸高度h<s
全文共6161字,剩余内容已隐藏,支付完成后下载完整资料</s
资料编号:[16546],资料为PDF文档或Word文档,PDF文档可免费转换为Word

