
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
插电式混合动力汽车不同控制策略的比较研究
Vincenzo Marano, Pinak Tulpule
The Ohio State University
Stephanie Stockar
ETH Zuuml;rich
苏黎世联邦理工学院
Simona Onori, Giorgio Rizzoni
The Ohio State University
版权归copy;2009 SAE International所有
文献摘要
插电式混合动力汽车(PHEVs)介于混合动力汽车(HEVs)和电动汽车(EVs)两者概念之间,因此结合了两种结构的优点。PHEVs可以实现非常高的燃油经济性,同时保持混合动力的全功能——长距离行驶里程,简单地加油,更低的排放等等。这些优点是以可获得的燃料的复杂性为代价的。PHEV电池的充电方式是再生制动和直接通过电网,从而增加了控制问题的额外计算。随着燃料消耗的最小化,从电网获取的电量也应该被考虑在内,因此发电的混合和价格成为了成本函数中应该包含的额外参数。
本文讨论了两种控制算法——ECMS(等效消耗最小化策略)和DP(动态规划),以优化电力和机械能源之间的功率分配。利用动态规划的动态规划方法,将PHEV作为整车最优能源管理策略,作为评价机载可实现控制策略的基准。ECMS用于设计两种控制模式- EV和混合动力。在Matlab/Simulink环境中开发了一种由生物柴油B20驱动的雪佛兰Equinox的PHEV版本。在俄亥俄州立大学的汽车研究中心(CAR),一辆雪佛兰Equinox被设计作为Challenge-X竞赛的一部分;该车辆用于验证Simulink模型的组件。
介绍
燃料成本的增加和严格的排放要求导致了新的汽车技术的发展,比如HEV混合动力电动汽车,EV纯电动汽车,PHEV插电式混合动力电动汽车等。PHEVs在满足低排放和燃料消耗的未来需求方面有着巨大的潜力。与混合动力汽车类似,PHEV由两种动力供能,汽油和电力驱动。与混合动力汽车不同,插电式混合动力车有更多的电池容量和充电电池的能力从外部源如电网、太阳能、等外部充电能力,允许耗尽电池在车辆操作期间,当车子停下时,运输和提供更大的电能取代更多的汽油燃料。在HEV中,电池是用ICE和再生制动充电的,在整个驾驶周期中,电池的电量维持在一个恒定值附近。通过优化电池与ICE之间的功率分配,实现了HEV燃油经济性的提高。
PHEVs的能量管理算法涉及到更多的问题,因为需要确定在整个驾驶过程中如何利用电池能量。例如,一种可能的策略可以在整个驾驶周期内逐渐放电,另一种策略可能是完全放电,然后进行充电维持操作。在行驶过程中,控制策略所使用的电荷状态(SOC)对车辆的燃油经济性有很大的影响。为了选择一个最优的SOC剖面,需要知道其速度范围[1]。PHEVs利用电网中的电能,从而实现能源管理。
算法还需要其他因素的信息,如发电的混合、发电厂排放、电力成本,以优化车辆的电力使用。因此,PHEV能源管理问题成为一个多目标最小化问题。利用DP应用于标准驱动周期[2],了解SOC剖面与行驶距离之间的关系。在[3]中使用实时驱动数据,并通过两个阶段的DP来改进PHEV性能,实现了一个切实可行的算法。在[4]中考虑了随机动态规划模型,并找出了最优的能源管理策略。其他方法使用基于规则的策略[5]。
在此基础上,实现了对控制问题的最优解。不幸的是,这种方法需要对驱动周期的a-priory知识,并且它不适合于机载实现,但是它可以作为一个基准来评估ECMS的性能。本文采用ECMS算法设计了两种控制模式:纯电动和混合动力模式,并将结果与DP的解决方案进行比较。
车辆结构
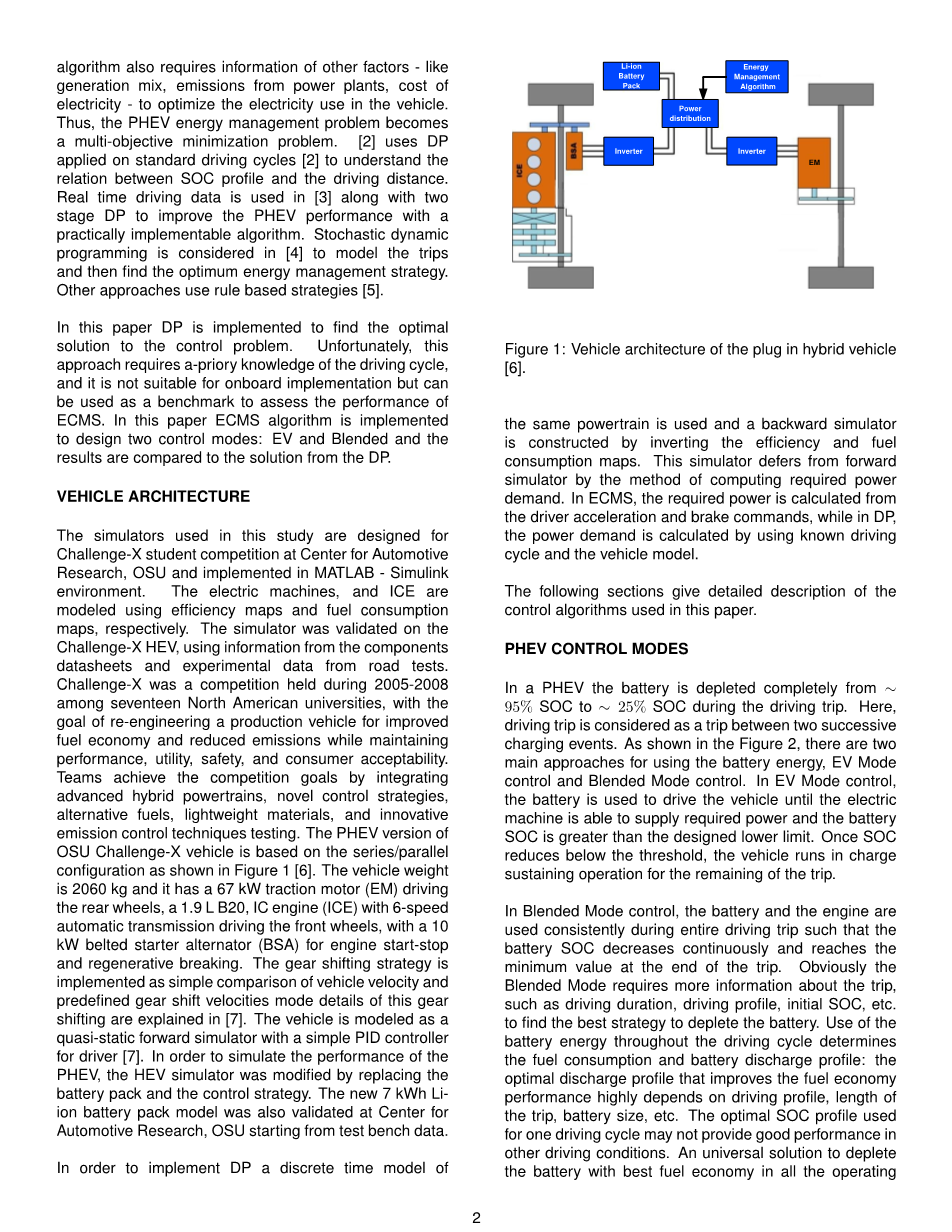
本研究采用的仿真器是针对俄亥俄大学的汽车研究中心的名为Challenge-X的学生竞赛所设计的,并在MATLAB - Simulink环境中实现。电机和ICE分别使用效率脉谱图和燃料消耗脉谱图来建模。该模拟器是基于Challenge-X的 HEV上进行的,使用的信息和实验数据分别来自于组件数据表和道路实验。Challenge-X是在2005-2008年间在北美17所大学举办的一项竞赛,目的是重新设计某款已产汽车,来提高其燃料经济性和减少排放,同时保持其性能表现、实用性、安全性和消费者可接受性。团队通过集成先进的混合动力总成、新颖的控制策略、替代燃料、轻质材料和创新的排放控制技术的达到竞争的目标。俄亥俄大学 Challenge-X 竞赛中的汽车的PHEV版本基于如图1所示的串联与并联配置[6]。车重2060公斤,它有一个67千瓦的牵引电机(EM)驱动后轮,一个1.9 升B20型 IC发动机(ICE)和6档自动变速箱驱动前轮,以及一个10千瓦的皮带启动发电机(BSA)负责发动机启停和再生制动。变速换挡策略是通过[7]中车速和预先设定的换挡速度的简单比较来阐述的。该车辆被建模为一个具有简单PID控制器的准静态正向仿真器[7]。为了模拟PHEV的性能,我们通过更换电池组和控制策略对HEV模拟器进行了改进。新的7千瓦时锂离子电池组模型也在俄亥俄大学汽车研究中心进行了验证,这从台架实验的数据开始。
图一:插电式混合动力电动汽车的结构[6]
为了实现DP,通过使用统一动力系统的离散时间模型,并且通过对效率脉谱图和油耗脉谱图的转换,建立一个后向仿真器。该模拟器通过计算所需动力需求的方法,从正向模拟器中计算出来。在ECMS(等效消耗最小化策略)中,所需功率是由驾驶员加速度和制动指令计算的,而在DP(动态规划)中,功率需求是通过已知的驾驶循环和车辆模型来计算的。
下面的部分详细描述了本文所使用的控制算法。
插电式混合动力汽车控制模式
在PHEV中,电池的SOC在驾驶过程中从95%完全耗尽到25%。在这里的“驾驶过程中”被认为是两次连续的充电之间的旅行。如图2所示,使用电池能量共有两种模式:纯电动模式控制和混合模式控制。在纯电动模式控制中,电池被用来驱动汽车,直到电动机器能够提供所需的电力,而电池的SOC大于设计的下限。一旦SOC降低到下限,车辆将在剩余的行程中负责维持运行。
在混合模式控制中,电池和发动机在整个行驶过程中持续地使用,以至于电池SOC持续减少并在行程结束时达到最小值。显然,混合模式需要更多的驾驶工况信息,如驾驶时间、驱动力范围、初始SOC值等,以找到耗尽电池的最佳策略。在整个驾驶循环中电池能量的使用决定了燃料消耗和电池放电范围:可提高燃油经济性性能的最优流量范围值,高度依赖于驱动力范围,行驶里程,电池容量等等。用于一个驾驶循环的最优SOC概要范围可能在其他驾驶条件下无法提供良好的性能。在所有运行条件下,用最好的燃料经济性来使用电池的通用解决方案并不存在,但是[1,8]中所做的分析给出了这两种模式的比较的某种观点。
图二:基于FUDS(联邦城镇驾驶规则下)下的四个连续周期内的纯电动模式与混合模式下的驾驶速度与SOC、发动机启动时间的关系
插电式混合动力电动汽车的控制问题
PHEV的系统平衡关系如下所示:
|
x˙ = |
minus;eta; |
PEM PBSA |
if PEM PBSA le; 0 |
||||||||
|
Emax |
|||||||||||
|
= |
minus; |
PEM PBSA |
if PEM PBSA gt; 0 |
(1) |
|||||||
|
eta;Emax |
|||||||||||
|
Pwheel |
= eta;ICE (TICE , omega;ICE )PICE |
||||||||||
|
eta;EM (TEM , omega;EM )PEM |
|||||||||||
|
eta;BSA(TBSA, omega;BSA)PBSA |
(2) |
||||||||||
其中,
|
x |
=: |
SOE |
(3) |
|
u |
=: |
[PEM PBSA]T |
(4) |
Emax是整个电池的容量,eta;被认为是充放电的系数,此处设定为常数,是输入电机的电功率,是ICE的功率,是输入BSA的电功率,是轮胎的需求功率, ,,是由各自的执行机构输入到车轮的效率。这些效率包括设备的损失和从传动轴到车轮的动力总成部件的损失。是由= 确定的电池功率,SOE是定义为电池容量与电池总容量的比值的能量状态值。SOE与SOC的关系如下所示:
|
SOE = SOC |
V (SOC) |
(5) |
|
Vnom |
Vnom是电池的标称开路电压,V是电池开路电压,在本文中,我们假设整个操作区域的电池电压保持不变。
V (SOC) = V
全文共8087字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15703],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

