
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
《国际汽车技术杂志》第13卷第3期,第505-516页(2012) 版权所有copy;2012 KSAE / 064-17
DOI 10.1007 / s12239-012-0048-x pISSN 1229-9138 / eISSN 1976-3832
插电式混合动力汽车动力特性及控制策略的比较研究
C. MA, J. KANG, W. CHOI, M. SONG, J. JI and H. KIM*
成均馆大学机械工程学院,韩国京畿道440-746,韩国
(2011年6月29日收到; 2011年8月26日修订; 2011年9月15日接收)
摘要:本文对两种插电式混合动力电动汽车(PHEV)进行了比较研究:通用福特和丰田普锐斯插电式混合动力汽车。首先,推导出两种车型的动力总成模型,并基于动态模型,为每台PHEV开发了一个详细的组件控制算法。具体而言,针对电动发电机1(MG1)和MG2提出了一种控制算法,以实现最佳的发动机运行操作。此外,从燃油经济性、电池充电状态和车辆速度等角度出发,开发了一种用于选择运行模式的能量管理策略。最后对每一个PHEV的控制算法的动态模型进行仿真,通过将仿真结果与使用模拟器获得的插电式普锐斯动力系统进行比较来验证仿真结果。并根据仿真结果进行比较研究,结果表明MG1和MG2的作用、容量以及模式选择算法必须根据PHEV的配置来确定。
关键词:PHEV,动力传动,控制算法,能量管理策略,比较研究
- 引言
为了解决目前的环境污染和能源短缺问题,混合动力汽车(HEVs),插电式混合动力汽车(PHEVs)和电动汽车(EVs)的开发和使用在短期内被认为是最可行的解决方案。由于这些车型使用的是相对廉价和清洁的电力,所以与普通的汽油动力车相比,混合动力汽车、插电式混合动力汽车和电动汽车的燃油经济性大大提高,排放量大大降低。但电动车的广泛使用受其电池成本和基础设施的限制。HEVs将传统发动机与电动机相结合,使HEV具有比传统车辆更好的燃油经济性。又因为插电式混合动力汽车允许全电动驱动,并且可以很容易地从家庭电网获取电力((Situ,2009年),与普通混合动力汽车相比,它具有更大的提高燃油效率和减少排放的潜力。此外,由于其HEV功能,PHEVs对于长距离驾驶也很有用。
各国对PHEV进行了许多研究。由于发动机(电动机)的功率容量,电池容量和变速比对车辆性能、操作效率、燃油经济性和电池充电状态(SOC)有很大影响,所以插电式混合动力汽车动力系统的参数需要通过一个优化过程来确定。各部件选型完成后,就应开发一种混合控制策略,以确定动力系统中的动力分配,如动力传动特性、电池SOC和驾驶员需求等(Amjad等,2010)。依据PHEV的性能指标,研究人员基于MATLAB / SIMULINK平台开发了总线平行PHEV模型的控制策略(Sun等,2008)。本文介绍了PHEV能量管理系统的建模,控制策略和仿真分析,并将PHEV仿真结果与先进车辆模拟器(ADVISOR)模型进行比较,验证了模型的准确性(Abdul Rahman等,2008)。此外,先进车辆测试活动(AVTA)作为美国能源部自由汽车和车辆技术计划的一部分,已经对HEVs和PHEVs进行了基准性能、电池基准测试和车队测试,并针对PHEV的各种运行模式进行测试 (Kaner和Francfort,2007)。并使用全局优化算法(Karbowski等,2009)对插电式混合动力操作的动力系统配置进行比较。插电式混合动力汽车因其优势在汽车工业中受到越来越多的关注,但是不同PHEV的配置需要不同的控制算法,因此关于其详细的组件控制算法和能量管理策略的研究还比较少。
此次选择了通用福特和丰田普锐斯插电式混合动力汽车进行比较研究。这两款车都是动力分配型车辆,可实现无级变速(CVT)功能。通用福特是一种输出分流式车辆,其输出功率分配为发动机功率。而丰田普锐斯插电式混合动力车则是一种输入分流式车辆,其输入功率分配为发动机功率(Kang 等,2010; Ehsani等,2010)。通用福特有一个行星齿轮,电动行驶里程为40-80公里。而丰田普锐斯插电式混合动力车则基于第三代普锐斯设计,其电动续航里程为21公里。因为维持纯电动模式运行,混合动力模式运行和电池SOC的策略取决于动力总成配置和动力总成子模块的控制策略,所以这里进行组件控制算法和能量管理策略比较研究的两款PHEV,都提到了一种新型PHEV的设计。
本文对通用福特和丰田普锐斯插电式混合动力汽车进行了比较研究。获得了通用福特和插电式普锐斯动力总成的动态模型。基于动态模型,针对插电式普锐斯和通用福特开发了详细的组件控制算法和能量管理策略,并对其性能和控制策略进行了比较研究。
2. PHEV动力传动系统
GM Volt和插电式Prius似乎具有相似的动力总成部件,如一个发动机,一个动力电池组和两个MGs,但动力总成系统的部件尺寸和配置完全不同,这意味着控制算法的不同。
2.1.GM Volt动力系统
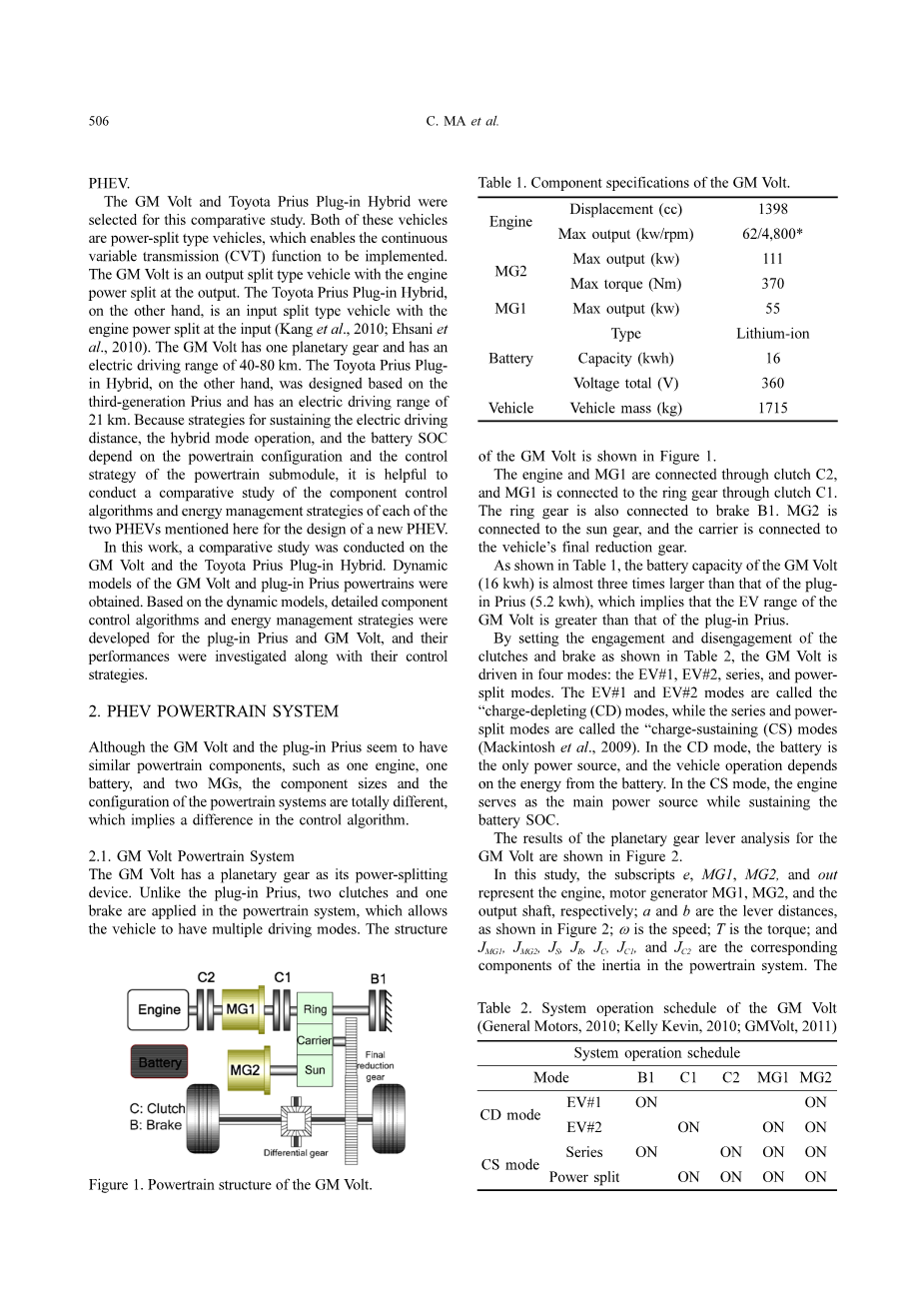
GM Volt有一个行星齿轮作为它的动力分配装置,与插电式Prius不同的是,动力传动系统采用两个离合器和一个制动器,这使得车辆可以拥有多种驱动模式。GM Volt的结构如图1所示。
图1. GM Volt的动力总成结构 表1. GM Volt的部件参数
发动机和MG1通过离合器C2连接,MG1通过离合器C1连接到齿圈。齿圈也与制动器B1相连。MG2连接到太阳轮,而行星架连接到车辆的最终减速齿轮。
如表1所示,GM Volt(16kwh)的电池容量几乎是插电式Prius(5.2kwh)的三倍,这意味着GM Volt的电动汽车续航里程要比插电式Prius的电动汽车续航里程要大。
如表2所示,通过设置离合器和制动器的接合和分离,使得GM Volt以四种模式驱动:EV#1、EV#2、串联和动力分配模式。EV#1和EV#2模式被称为“电荷损耗(CD)模式”,而串联和动力分配模式被称为“电荷保持(CS)模式”(Mackintosh 等,2009)。在CD模式下,电池是唯一的电源,车辆的运行取决于电池的能量。在CS模式下,发动机在维持电池SOC的同时充当主动力源。
对GM Volt的行星齿轮杠杆分析结果如图2所示。
图2. GM Volt行星齿轮的杠杆分析 表2. GM Volt的系统运行时间表
(通用汽车,2010年;凯利凯文,2010年;通用福特,2011年)
在本研究中,下标e,MG1,MG2和out分别代表发动机,电动发电机MG1,MG2和输出轴; a和b是杠杆距离,如图2所示; omega;是速度; T是转矩; ,,,,,和是动力系统中相应组件的惯性力。杠杆模型是一个2自由度系统。
动力总成部件和车辆动力学模型的速度关系通过以下公式获得:
⑴
⑵
⑶
其中V是车速,是道路载荷,是最终减速比,是轮胎半径。假设小齿轮惯性被忽略,车辆动力学只考虑纵向。
EV#1和EV#2模式中GM Volt的变速器动态模型推导如下:
⑷
⑸
在串联模式下,MG2的动力学方程与方程(4)中所示的相同,发动机和MG1的动力学方程从图2中获得,如下所示:
⑹
在动力分配模式下,MG2的动力学方程仍然与方程(4)中所示的方程相同,并且发动机和MG1的动态方程推导如下:
⑺
2.2. 丰田Prius插电式混合动力系统
插电式Prius的结构如图3所示(Takasaki 等,2009; Yaguchi等,2009)。它是基于第三代普锐斯开发的,它的传动装置有两个行星齿轮。行星齿轮1(PG1)是其主要的动力分配装置,PG2可用作电机最终减速装置。
插电式Prius的系统运行时间表如表3所示。
图3.插电Prius的动力总成结构 表3.插电Prius的系统运行时间表
对于主动力分配装置,发动机连接到行星架,MG1连接到太阳轮,MG2通过电机减速装置连接到齿圈。PG2和与MG2连接的太阳轮,与制动器相连的行星架,连接到输出的齿圈作为电机减速装置。
通过杠杆分析,获得了主要行星齿轮的速度关系(Kim 等,2009):
⑻
图4.插电式Prius行星齿轮的杠杆分析 表4.插电式Prius的组件规格
因为在以前的许多研究中讨论过,所以Prius动力总成系统的动力学模型是众所周知的,(Liu和Peng,2008,2005; Rask等,2010)。
与GM Volt不同的是,插电式Prius只使用一个固定制动器,因此行星齿轮可作为减速器。无论从家庭电网获得的电力如何,发动机都是汽车的主要动力源,它提供驱动车辆所需的动力。发动机可以在MGV模式下与MG2一起驱动车辆,也可以在HEV模式下通过MG1给电池充电。此外,MG2主要用于推进车辆或恢复再生制动能量,而MG1可以用来控制发动机,以保证发动机运行最佳。
- PHEVS的控制策略
假设电池已完全充电,则车辆在启动时置于EV模式。当电池SOC降低并达到其下限时,车辆运行模式切换到HEV模式,以延长行驶里程。因此,需要适当的能量管理策略来提供最佳的燃油效率并保护电池。且在HEV模式下,需要针对每种运行模式制定组件控制算法和能量管理策略来确保最小的燃油消耗率。
3.1. GM Volt的控制算法
本研究中使用的驱动模型如图5所示。
在给定的驱动周期,驾驶员操纵加速踏板()或制动踏板()。和操作采用PI型驱动模型。
图5.驱动模型 图6.再生制动控制算法
⑼
⑽
其中是比例调节系数,是积分调节系数,和分别是期望车速的和实际反馈车速。
基于和得到调节输出的转矩为:
⑾
其中是车辆可以提供的最大转矩,是调节输出的转矩。
在制动过程中,电机可以重新获得再生制动能量并将其存储在电池中。因此,再生制动控制算法也得到了发展,如图6 (Jo, 2010)所示。
如果前轮所需的制动转矩大于电机的最大再生转矩,则制动转矩应由电机和制动器一起提供。否则,仅使用电机再生转矩来提供所需的制动转矩。
如果车辆在EV#2或动力分配模式下运行,则必须确定MG1和MG2之间的转矩分配。 所需的再生转矩可以通过杠杆分析来计算。
⑿
⒀
其中是需要的再生转矩
3.1.1 CD模式下的组件控制算法
CD模式也被认为是一种EV模式,包含EV#1和EV#2模式。在EV#1模式中,只有MG2用于驱动车辆。因此,需求的MG2转矩直接根据要求的车轮转矩来计算。
⒁
在EV#2模式中,MG1用于与MG2一起驱动车辆。要求的MG2转矩与等式(14)中所示的相同。从杠杆分析中,可以根据要求的车轮转矩来计算MG1所需的转矩。
⒂
3.1.2 CS模式下的组件控制算法
CS模式也被认为是HEV模式,包含串联和动力分配模式。从GM Volt的结构和杠杆分析中发现,MG2在CS模式下仍然驱动车辆。因此,所要求的MG2转矩与等式(14)中所示的相同。
在CS模式下,如果初始电池SOC等于最终的电池SOC,则可以假定发动机提供了所有所需的车轮动力。由于输出处于分配模式,发动机操作也与车轮分离。基于所需的发动机功率,发动机最优工作线(OOL)可用于确定CS模式下的最佳发动机指示转矩和速度。
在串联模式下,MG1由发动机驱动产生电力以满足车辆的动力需求,并且该模式也用于最佳发动机运行。由于要求的发动机转矩和转速已经从发动机OOL获得,并且当发动机和MG1直接连接时,MG1指示转矩等于负的发动机指示转矩。通过发动机转速进行PI型MG1转矩控制,以实现最佳发动机运行。在串联模式下得到的MG1转矩为:
⒃
其中是比例调节系数,是积分调节系数,是要求的发动机转矩,和是要求的实际发动机转速。
在动力分配模式下,发动机、MG1和MG2相互配合驱动车辆。如图7所示,要求的发动机转矩是从发动机OOL获得的。MG1用于优化发动机运行。如果发动机转矩不能满足转矩要求,则额外的转矩由MG1提供。该转矩是
全文共15981字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15687],资料为PDF文档或Word文档,PDF文档可免费转换为Word

