英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
双电机驱动高速履带车辆动态转向横向稳定性控制
L. ZHAI1, 2)*, T. M. SUN1, 2), Q. N. WANG3) and J. WANG4)
1)National Engineering Laboratory for Electric Vehicle, Beijing Institute of Technology, Beijing 100081, China 2)Co-Innovation Center of Electric Vehicles in Beijing, Beijing Institute of Technology, Beijing 100081, China 3)Institute of Vehicle Engineering,
Technical University of Berlin, Berlin 13355, Germany 4)Foton Motor Inc., Beijing 102206, China
(Received 6 August 2015; Revised 29 January 2016; Accepted 7 May 2016)
摘要 - 分析了不同转向半径的动态转向机动过程中电动履带车双电机所需的转矩和功率。 针对双马达驱动高速电动履带车(2MHETV),提出了一种由新型中心转向马达,两个电磁(EM)离合器,两个行星齿轮联轴器和两个推进马达组成的转向耦合传动系统,提高其横向稳定性。 分别设计基于转向耦合的平均转矩直接分配控制策略和基于优化分配的闭环控制策略,以控制两台推进电动机的驱动转矩或再生制动转矩,以提高车辆稳定性。 然后在Recudyn和Matlab / Simulink中分别建立2MHETV模型和提出的控制策略,以评估2MHETV在硬路面上不同转向半径下动力转向的横向稳定性。仿真结果表明,2MHETV的横向稳定性能通过基于转向耦合系统的基于优化分配的闭环控制策略得到显着改善。
关键词:履带式车辆,双电机驱动,动态转向,机电耦合,稳定控制
专业术语:
EM:电磁
2MHETV:双马达驱动电动履带车
2MIETV:双马达驱动高速电动履带
ECDS:电控差速转向
2MCDS:双电机联轴器传动转向
FOC: 磁场矢量控制
ESC:电动稳定控制
APS:加速踏板信号
BPS:制动踏板信号
WLS:加权最小二乘
1.介绍
履带式车辆在军事,农业,建筑,采矿和救援等许多领域都有广泛的应用。 对于高速履带车辆来说,具有更高的机动性和越野能力是必不可少的。电动履带车的开发是为了解决城市交通领域中的能源危机和空气污染问题。然而,电动驾驶方面的研究很少有关于履带车辆领域。由于技术限制,电动履带式车辆仅在第一次和第二次世界大战期间用于低速坦克。在上个世纪,高功率密度电动机和发电机的技术突破促进了电驱动履带式车辆的发展。自20世纪90年代以来,全电动战车变得非常流行。电驱动系统不仅用于满足车辆动态性能的需要,而且还用于为电磁武器提供能量。因此,电动履带式车辆是未来履带车辆发展的主要趋势之一。 高速履带车辆的转向是一个核心问题。并且转向的灵活性和可控性是两个重要的可操作性评价指标。履带车辆的转向原理和机构与轮式车辆的不同。由于两个驱动链轮之间的转向机构,传统履带车辆很难实现连续可变的转向和更好的操纵稳定性。转向过度,转向不足,打滑和侧翻容易发生,这使车辆失去驾驶能力。
电动履带车辆的驱动结构有双电机独立驱动,单电机驱动,其中两个链轮与水平轴连接,以及混合机电复合驱动。 双电机独立驱动更常用于电动履带车辆(Li等人,2011; Sun等人,2006)。 双电机的转速或转矩分别由双电机控制器控制,以实现两个轨道之间的速度差并产生所需的转向驱动转矩(Chen和Zhang,2010; Zhai等,2011)。
ECDS可用于2METV,其具有以下优点(Zhai等,2009; Zou等,2007):
①优秀的转向灵活性,无级变速转向和变速,平均转向速度更高,无机械变速冲击,驾驶员操控方便;②转向操纵稳定性好,转向轨迹可控性好;③转向功耗较小,再生功率利用率较高;④模块化设计,数字化设计和网络设计都可以轻松实现;⑤灵活组件之间的连接,整体方便布局和简化的底盘结构。因此ECDS可以提高履带车辆转向的灵活性,可控性和稳定性。然而,由于以下两个未解决的问题,容易出现转向不足和转向过度:
高速转向所需的外部电机功率是传统车辆发动机功率的2.5倍以上,导致电机和功率逆变器的体积和功率较大。 特别是,高速动态转向需要更多的外电机功率。
之前电动履带式车辆的电子控制转向研究主要集中在典型的稳态转向性能上。没有考虑到动态转向的电气稳定性控制。
机电耦合传输被提出用于减少转向期间要求的2METV的单侧电机牵引力(Thompson,2006)。然而,由于两台电机之间复杂的机械限制,无法实现连续可变的转向。使用带有辅助电机的机械耦合装置来降低单向主驱动电机的牵引力(Sun等,2011)。然而,2METV中电机的总功率并没有减少。 在以前的转向研究中,基于上述方法实现了2METV在硬直路面上的直行和平稳转向操作的动态性能(Wang,2014)。 有许多研究关注轮式电动汽车的驾驶稳定性(Emirler等,2015; Chen and Kuo,2014; Yin and Hu,2014; Yim,2014; Yin等,2015)。 然而,很少有研究关注2METV的动态转向稳定性。
本文侧重于2MHETV的横向动态稳定控制。本文的其余部分组织如下:第2节,履带车辆的数学模型提出并分析了动态转向过程中的车辆。
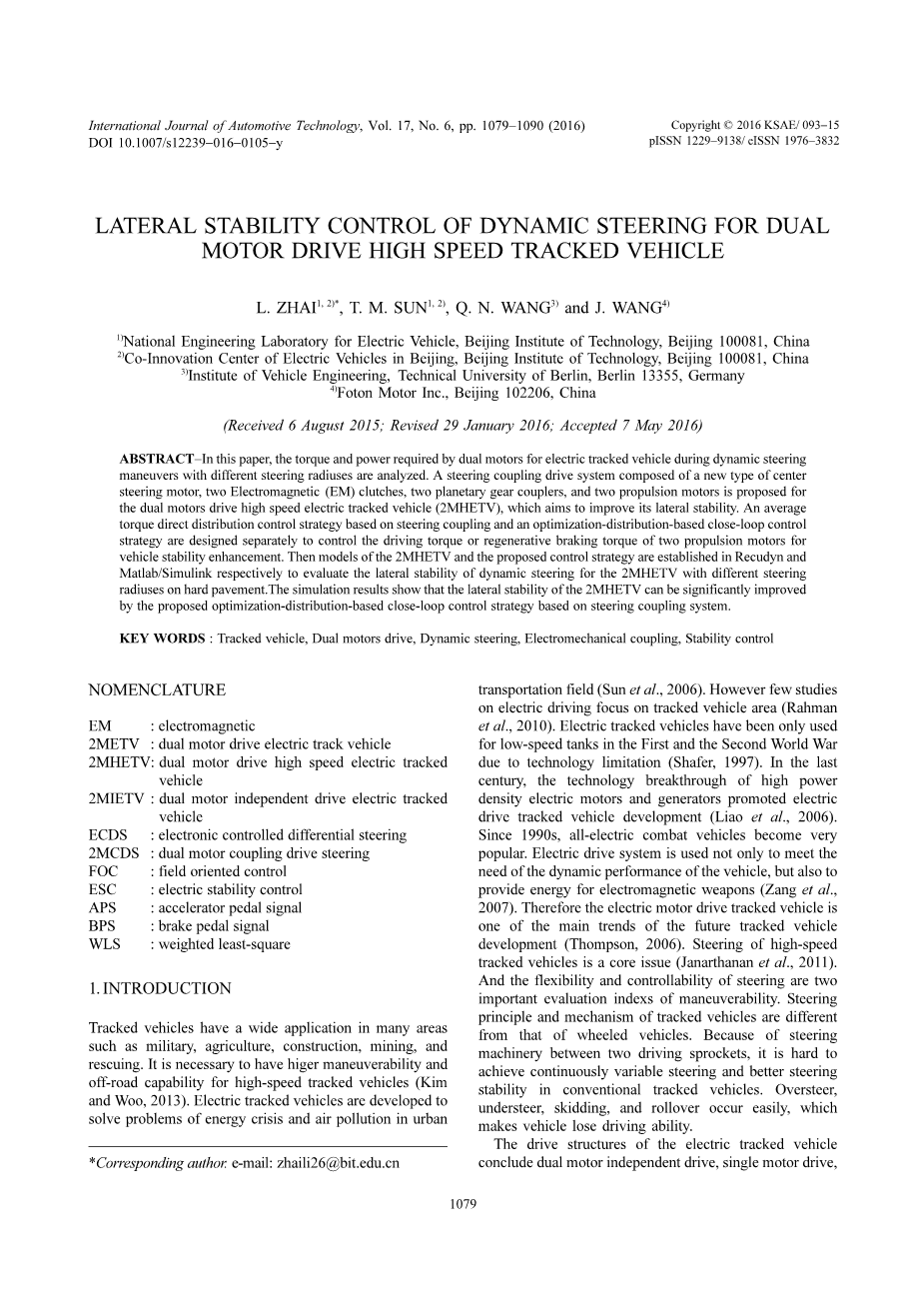
图1. 2MIETV的电力驱动系统配置。
在第3节中提出了转向耦合驱动系统。在第4节中,设计了基于优化分配的闭环控制策略来提高动态转向期间2MHETV的稳定性。 并且在第5节中,进行具有不同转向半径的转向机动中的2MHETV的模拟。 最后,第6节总结本文。
2.动态转向的数学模型
2MIETV的电力驱动系统配置如图1所示,广泛应用于2METV。 从电池组和发电机发电机产生的电力被提供给能量分配单元,该能量分配单元将电力传输到两个电动机控制器和能量吸收单元。通过迫使两个轨道以不同的速度转向来操作滑行转向履带式车辆(Chen等人,2010; Zhai等人,2011)。左右驱动链轮之间的速度差可以通过控制双电机之间的转矩差来实现。根据表1所示的车辆参数计算不同转向操作的双电机所需的转矩和功率。
表1.车辆参数
|
参数 |
值 |
|
车辆轮胎宽度,B(m) |
1.3 |
|
履带,2n |
10 |
|
接地长度,L(m) |
1.7 |
|
滚动阻力系数f |
0.04 |
|
传输效率eta; |
0.9 |
|
传动比,ig |
7 |
|
车辆质量,m(kg) |
2000 |
|
质量增益系数delta; 惯性矩J(kg / m2) |
1.5 3000 |
图2.不同转向半径的力分析
在本文中,我们以右转向为例,对履带车辆的牵引力F1,内履带F1和外履带F2,滚动阻力R1,内履带R1和外履带R2,转向阻力矩Mmu;,轨迹速度,内侧为v1,外侧为v2,偏航率omega;为不同半径的转向操纵,如图2所示。与不同转向操纵对应的动平衡可根据图2
2.1中心转向
图2(a)显示了履带车辆中心转向机动力与力矩的动态平衡
其中:
,是滚动助力系数,mu; 的定义式为:,其中是滚动阻力系数的最大值,R是车辆的转向半径。两个轨道的大小相同但方向相反的滚动阻力表示如下:R1 = R2 = 0.5 fmg
如图2(a)所示,F1和F2可以定义如下:
两台电机的输出功率定义如下:
i=1,2
其中是是电机的输出转矩是驱动链轮的半径,Pi是电机的输出功率。 根据等式(4),两个电动机的输出功率可以表示如下:
其中
2.2小半径转向
从图2(b)中,F1和F2可以定义如下:
2.30.5B转向
从图2(c)可以看出,0.5B转向半径处的内侧轨道速度为零。 F1和F2可以定义如下:
从方程(3)、(6)和(7),F1和F2的轨道方向相反的中心转向牵引力、小半径转向机动(0<R<0.5B),和0.5b转向。
2.4大半径转向
车辆的大半径转向运动通常用于转向转向并结束制动转向,自由转向和转向转向。
2.4.1制动转向
从图2(d)可以看出,F1是内轨的制动力,F2是外轨的牵引力。 F1和F2可以定义如下:
来自外轨道的电力被消耗到地面。然而,功率形式的内轨道被吸收,以回馈电池。
2.4.2自由转向
根据公式(8),在静态转向运动中作用在车辆上的牵引力可按如下方式获得:
在自由转向机动中,内轨F1的牵引力假定为零,但是内发动机的速度不为零。 根据公式(9),可以如下获得自由转向半径R0:R0 = 67.54m
根据动平衡分析和图2(e),内轨的力为零,两轨的力可表示为:
2.4.3驾驶转向
驾驶转向通常用于在直行期间调节履带车辆的方向。 从图2(f)可以看出,内轨的牵引力小于外轨的牵引力,其计算公式如下:
表2.两台电机所需的动态和静止转向扭矩和功率
|
R |
T1(NM) |
T2(NM) |
P1(KW) |
P2(KW) |
N1(r/min) |
N2(r/min) |
|
|
动态 |
0 |
246 |
246 |
9.8 |
9.8 |
379 |
379 |
|
0.2B |
228 |
252.6 |
5.4 |
14 |
227.5 |
530.8 |
|
|
0.5B |
163.6 |
233.3 |
0 |
18.5 |
0 |
758.3 |
|
|
固定值 |
0 |
174 |
174 |
6.9 |
6.9 |
379 |
379 |
|
0.2B |
169 |
169 |
4 |
9.4 |
227.5 |
530.8 |
|
|
0.5B |
152.6 |
161.9 |
0 |
12.9 |
0 |
758.3 |
|
|
2B |
-116 |
134 |
-13.8 |
26 |
1137.5 |
1895.8 |
|
|
5B |
-82 |
100 <!--全文共10584字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15421],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

