
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
目录
2. General Platform Architecture 1
3. Design and Implementation of the System 3
3.1. Design and Implementation of the Communication Module 3
3.2. Implementation of the Automatic Safety Control and Control Module 4
3.3. Design of the Environment data Collection Module 5
英文原文
Design and Implementation of Remote Control System for Mobile
Platform Based on Interoperation of Android and Arduino(节选)
Xu Ri1 , Liang Jing-Chen2, Yang Hao3 and Teng Jing-Wen4
1,2,3,4Beijing Electronic Science and Technology Institute
14978368@qq.com, 2447328916@qq.com, 3604291518@qq.com,
4183124370@qq.com
Abstract
The project designed and implemented an interoperability mobile platform with a system
based on Android open source software platform and Arduino open source hardware
platform , an Android program on the host terminal receiving environment data from the
mobile platform and sending message through 3G channel using XMPP protocol, and an
Android program on the remote control terminal which could process the environment data
sent from the mobile platform according to the algorithm and send back control commands.
With this system, the mobile intelligent terminal can collect environment data of moving
objects in any area through the 3G signal and control the behavior of distant moving objects
to avoid collision. Meanwhile, the system which has broad application prospect is prototype
of self-driving car, robot designed for dangerous mission and Mars exploration rover.
Keywords: Arduino, Android, XMPP Protocol, Automatic Control
- Introduction
- General Platform Architecture
The project aims to implement an interoperability mobile platform by using Android,
Arduino and 3G network technology. Android system has good interactive interface while
Arduino system is able to control a large number of electronic components. Android and
Arduino can be integrated by using standard of Arduino-based Android Open Accessory and
ADK tools released by Google.
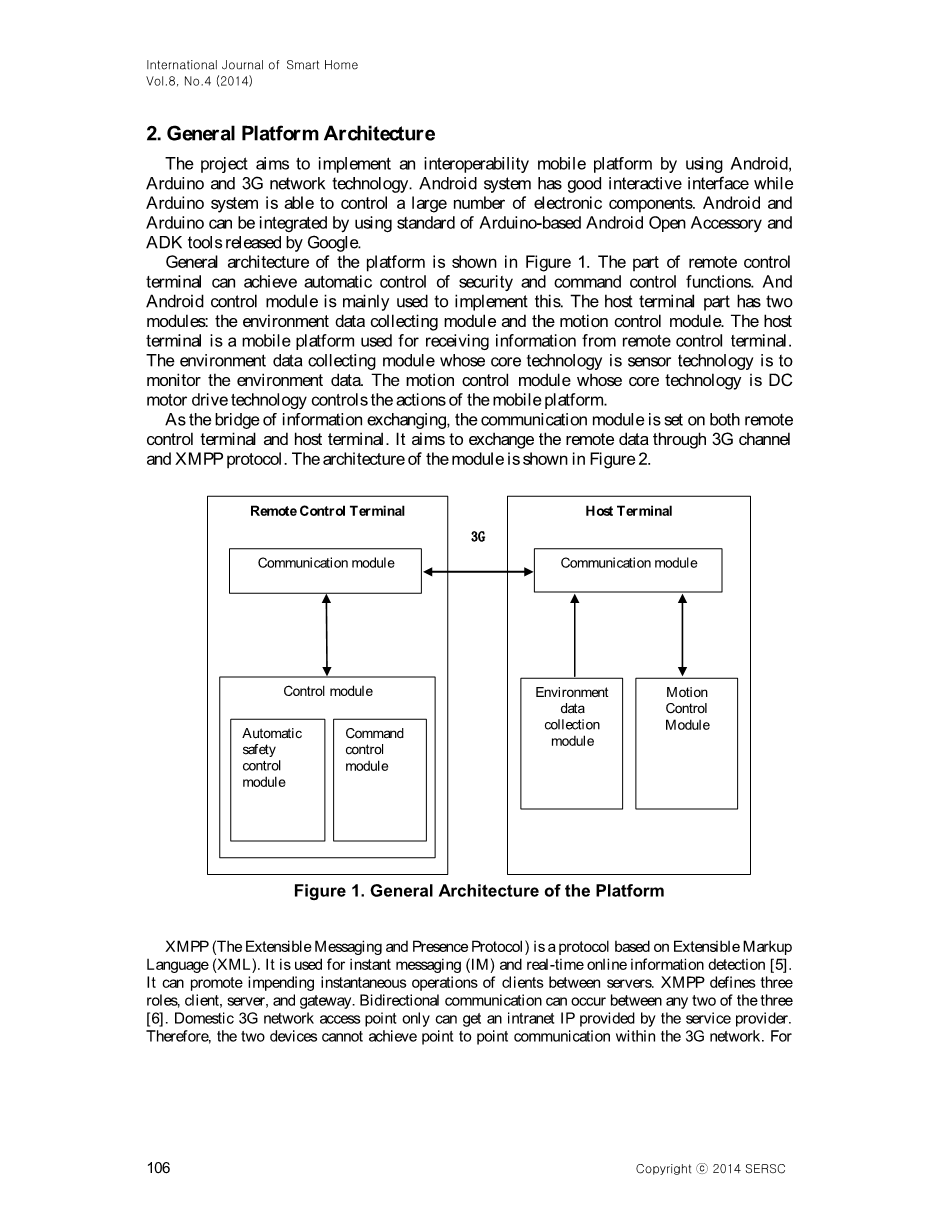
General architecture of the platform is shown in Figure 1. The part of remote control
terminal can achieve automatic control of security and command control functions. And
Android control module is mainly used to implement this. The host terminal part has two
modules: the environment data collecting module and the motion control module. The host
terminal is a mobile platform used for receiving information from remote control terminal.
The environment data collecting module whose core technology is sensor technology is to
monitor the environment data. The motion control module whose core technology is DC
motor drive technology controls the actions of the mobile platform.
As the bridge of information exchanging, the communication module is set on both remote
control terminal and host terminal. It aims to exchange the remote data through 3G channel
and XMPP protocol. The architecture of the module is shown in Figure 2.
XMPP (The Extensible Messaging and Presence Protocol) is a protocol based on Extensible Markup
Language (XML). It is used for instant messaging (IM) and real-time online information detection [5].
It can promote impending instantaneous operations of clients between servers. XMPP defines three
roles, client, server, and gateway. Bidirectional communication can occur between any two of the three
[6]. Domestic 3G network access point only can get an intranet IP provided by the service provider.
Therefore, the two devices cannot achieve point to point communication within
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[254735],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

