双星黑洞合并的引力波探测
作者:B. P. Abbott et al.* (LIGO 科学组织和Virgo组织)
国籍:美国
出处:《物理评论快报》
双星黑洞合并的引力波探测
B. P. Abbott et al.*
(LIGO 科学组织和Virgo组织)
(2016年1月21日邮寄;2016年2月11日发表)
2015年9月14日世界标准时间(UTC),激光干涉仪引力波天文台的两个探测器同时观测到了瞬时引力波信号。 信号在到间震荡,引力波峰值应变为。 它与广义相对论预测的一对黑洞的旋进和合并以及所得单个黑洞的铃宕相匹配的波形相匹配。 观测到信号的匹配滤波器的信噪比为,并且误报率估计为每年少于个事件,相当于大于的显着性。光源的发光距离为,对应于红移。在源框架中,初始黑洞质量为个太阳质量和个太阳质量,最终黑洞质量为个太阳质量,其中个太阳质量的能量在重力波中辐射。所有的不确定性都定义了的可信区间。这些观察证明了二元恒星质量黑洞系统的存在。这是首次直接检测引力波,也是首次观察到双星黑洞合并。
Ⅰ.INTRODUVTION
1916年,即广义相对论场方程最终形成的第二年,爱因斯坦(Albert Einstein)预测了引力波的存在。 他发现线性化的弱场方程具有波动解,源的质量四极矩随时间变化而产生的,空间应变横向波以光速传播。 爱因斯坦了解到,引力波的振幅会非常小。 此外,直到1957年的Chapel Hill会议召开之前,有关引力波的物理现实的争论还是很多。
同样在1916年,Schwarzschild发布了场方程的解,后来被理解为描述黑洞,而Kerr在1963年将解推广到了旋转黑洞。 从1970年代开始的理论工作导致了对黑洞准正态模态(quasinormal mode)的理解,并在1990年代后的牛顿阶高阶计算进行了相对论两体动力学的广泛分析研究。这些进展以及过去十年的数值相对论性突破,使得能够对二进制黑洞合并进行建模并对其引力波形进行准确的预测。 尽管现在已经通过电磁观测确定了许多黑洞候选者,但以前从未观察到黑洞合并现象。
Hulse和Taylor 发现了双星脉冲星系统PSR B1913 16,随后Taylor和Weisberg对其能量损失进行了观测,证明了引力波的存在。这一发现以及对天体物理学的新认识导致人们认识到,直接观测引力波的振幅和相位将使人们能够研究其他相对论系统,并提供有关广义相对论的新检验,特别是在动态强场条件下 。
检测重力波的实验始于1960年代的Weber和他的共振棒检测器,随后是国际低温共振检测器网络。 干涉检测器最早是在1960年代初和1970年代中提出的。 对此类检测器的噪声和性能的研究,以及进一步改进这些检测器的概念,导致了对长基线宽带激光干涉仪的提议,该方案有望显著提高灵敏度。 到2000年代初,已经完成了一套初始探测器,包括日本的TAMA 300,德国的GEO 600,美国激光引力波天文台(LIGO)和意大利的处女座。 这些探测器的组合从2002年到2011年成为联合观察者,在发展成为全球网络的同时,为各种引力波的多样性设定了上限。 在2015年,先进的LIGO成为首个更敏感的先进探测器网络开始观测。
在Einstein和Schwarzschild的基本预测之后的一个世纪,我们报告了对引力波的首次直接检测以及对合并形成单个黑洞的二元黑洞系统的第一个直接观察。我们的观察结果为在强场,高速状态下的时空特性的正确性提供了独特的途径,并证实了对高度干扰的黑洞的非线性动力学的广义相对论的预测。
Ⅱ.OBSERVATION
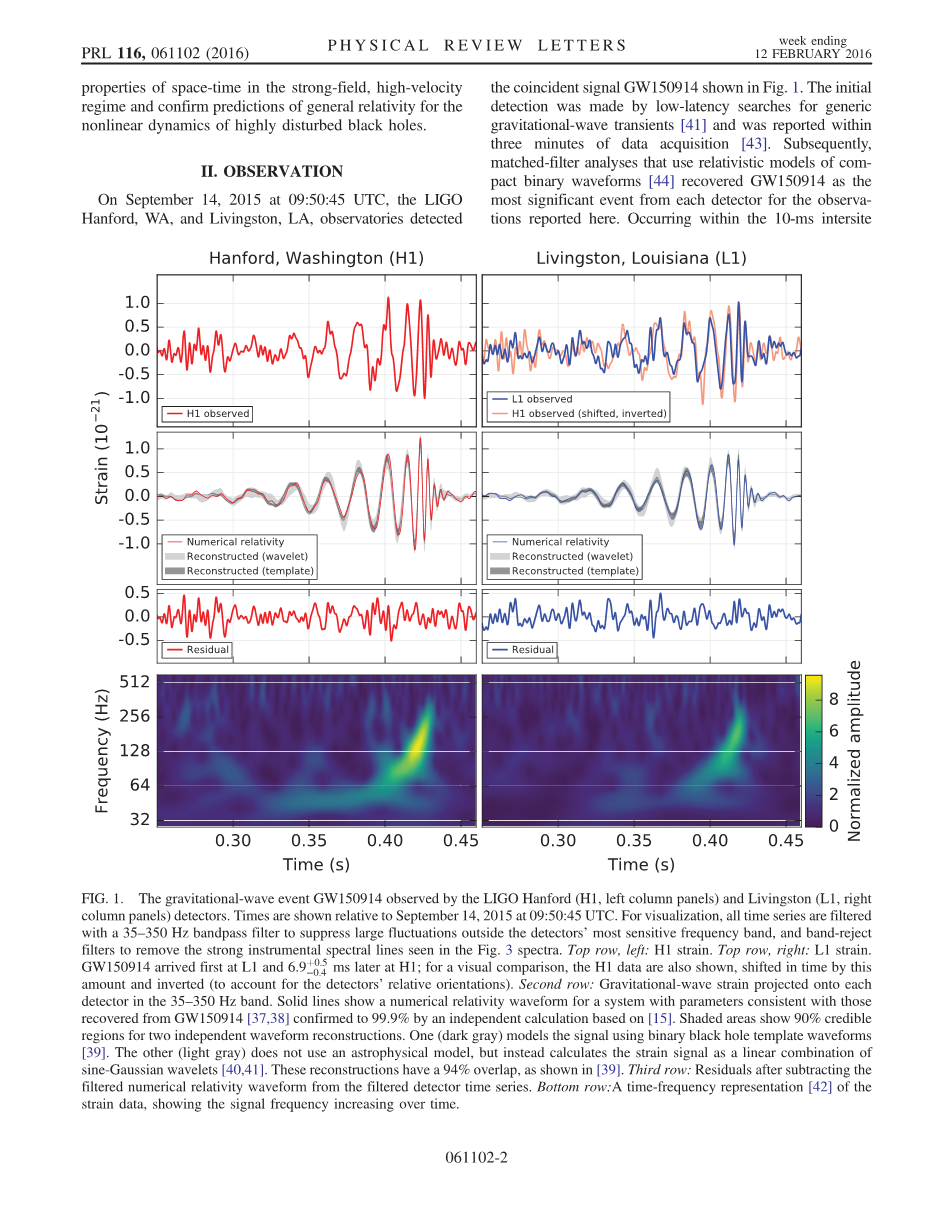
在2015年9月14日世界标准时间(UTC),华盛顿州利格·汉福德市和路易斯安那州利文斯顿市的天文台检测到了图1所示的一致信号GW150914。最初的检测是通过低时延搜索通用引力波瞬变进行的,并在数据采集后三分钟内报告。 随后,使用紧凑二进制波形的相对论模型的匹配滤波器分析从每个探测器的观测结果中发现,GW150914是最重要的事件。在10毫秒的站点间传播时间内发生,这些事件的综合信噪比(SNR)为24。
GW150914时仅有LIGO探测器在观察。 处女座探测器正在升级,GEO 600虽然不够灵敏,无法探测到此事件,但仍在运行,但未处于观察模式。 仅使用两个探测器,源位置主要由相对到达时间确定,并定位在大约的区域(可信区域的)
GW150914的基本特征表明,它是由两个黑洞(即它们的轨道吸积和合并)以及随后的最终黑洞铃宕合并而成的。 在内,信号在到的约8个周期内在频率和振幅上增加,其中振幅达到最大值。 对于质量为m1和m2d的旋进演化的最合理的解释是由于引力波的发射。 在较低的频率下,这种演化的特征由调频质量决定:
其中和是观测到的频率及其时间导数,而和是引力常数和光速。 根据图1中的数据估算f和frsquo;,我们得到质量为,这意味着在检测器框架中总质量。这将二元分量的Schwarzschild半径之和限制为。为了达到的轨道频率(引力波频率的一半),物体必须非常接近且非常紧凑;以该频率运行的相等的牛顿点质量之间的距离仅为。 一对中子星虽然紧凑,但不会具有所需的质量,而具有推论旋进质量的黑洞中子星双星将具有非常大的总质量,因此会以低得多的频率合并。 这留下了黑洞,因为仅有的已知物体紧实到足以达到的轨道频率而没有接触。 此外,波形在达到峰值后的衰减与黑洞衰减到最终静止的Kerr构型的阻尼振荡一致。下面,我们对GW150914进行相对论分析。 图2显示了使用所得源参数计算出的波形。
Ⅲ.DETECTORS
引力波天文学利用多个相互分离的探测器来将引力波与局部仪器噪声和环境噪声区分开,提供源天空的定位并测量波的极化。每个LIGO站点都使用一个高级LIGO检测器,这是一种改进的迈克尔逊干涉仪,可以测量引力波应变,因为其正交臂长度的差异。每个臂由两个作为测试质量的镜组成,并以隔开。经过的重力波有效地改变了臂长,因此测得的差为,其中h是投射到检测器上的重力波应变幅度。这种不同的长度变化会改变返回到分束器的两个光场之间的相位差,从而将与重力波应变成比例的光信号传输到输出光电探测器。
为了获得足够的灵敏度来测量引力波,检测器对基本的迈克尔逊干涉仪进行了多项改进。首先,每个臂包含一个共振光学腔,该共振腔由其两个测试质量反射镜形成,该腔将引力波对光相位的影响倍增300倍。其次,在输入处的部分透射式功率循环反射镜在整个干涉仪中提供了额外谐振累积的激光:激光输入的入射光束上的入射光增加到 照在分束器,每个臂腔中的分流器进一步增加至。第三,输出端的部分透射式信号循环镜优化了通过扩大臂腔的带宽来提取重力波信号。干涉仪用1064纳米波长Nd:YAG激光照射,振幅,频率和光束几何形状稳定。使用零差读数在输出端口提取重力波信号。
这些干涉测量技术旨在最大程度地将应变转换为光信号,从而将光子散粒噪声(高频下的主要噪声)的影响降至最低。高应变敏感性还要求测试载荷具有低位移噪声,这是通过将其与地震噪声(低频)隔离并将其设计为具有低热噪声(中频)来实现的。每个测试质量作为四摆系统的最后阶段悬挂,并由一个主动隔震平台支撑。对于高于的频率,这些系统共同提供了与地面运动的10多个数量级的隔离。 通过在测试物料及其悬浮液中使用低机械损耗的材料将热噪声降至最低:测试物料为具有低损耗介电光学涂层的40公斤熔融石英基材,并从上述阶段悬浮于熔融石英纤维中。
为了最大程度地减少额外的噪声源,除激光源以外的所有组件均安装在超高真空的振动隔离台上。 为了减少由瑞利散射引起的光学相位波动,将包含臂腔梁的直径为1.2 m的管中的压力保持在以下。伺服系统控制用于使谐振腔保持共振,并保持光学组件的正确对准。 通过测量检测器输出对由调制的校准激光束产生的光子压力引起的测试载荷运动的响应,可以对应变进行校准。 建立校准时,其不确定度()的幅度应小于,相位的相位应小于10度,并使用选定频率的校准激光激励对其进行连续监视。 有两种方法可以用来验证绝对校准,一种是参考主激光波长,另一种是参考射频振荡器。此外,通过使用校准激光器注入模拟波形来测试探测器对引力波的响应。为了监视环境干扰及其对探测器的影响,每个天文台都配备了一系列传感器:地震仪,加速度计,麦克风,磁力计,无线电接收器,天气传感器,交流电源线监控器和宇宙射线探测器。 另有约105个通道记录了干涉仪的工作点和控制系统的状态。 数据收集与全球定位系统(GPS)的时间同步,优于。 每个原子观测站的原子钟和辅助GPS接收器均验证了时间的准确性。
在其最敏感的频带中,当前的LIGO检测器对应变的敏感度是初始LIGO的3至5倍。 在较低的频率下,改善甚至更大,在以下时灵敏度提高了十倍以上。 因为检测器对重力波振幅成比例地响应,所以在低红移下,随着应变敏感性的提高,它们敏感的空间体积会增加。 对于质量类似于GW150914的二元黑洞,这里报道的观测结果所调查的时空体积比以前的观测值高出一个数量级。
Ⅳ.DETECTOR VAILDATION
两个探测器在GW150914出现时均处于稳定状态运行了几个小时。 所有性能指标,特别是它们的平均灵敏度和瞬态噪声行为,在整个分析期间都是典型的。
对工具性和环境干扰进行了详尽的调查,没有证据表明GW150914可能是仪器的人工产物。通过测量检测器对特殊产生的磁,射频,声和振动激发的响应,可以量化检测器对环境干扰的敏感性。 这些测试表明,任何大到足以引起观察到的信号的外部干扰,都会被环境传感器阵列清楚地记录。没有一个环境传感器像GW150914那样记录任何随时间和频率变化的扰动,并且包含GW150914的第二秒内的所有环境波动都太小,无法说明其应变幅度的6%以上。 我们特别注意搜索可能在两个站点同时产生信号的远程相关干扰。并未发现重大干扰。
检测器应变数据显示出非高斯噪声瞬变,该瞬变源于各种仪器机制。 许多具有独特的特征,在对引力波不敏感的辅助数据通道中可见。这样的仪器瞬变从我们的分析中删除了。 残留在数据中的任何仪器瞬变都将在下文所述的估计检测器背景中得到解决。没有证据表明两个探测器之间在时间上相关的仪器瞬变。
Ⅴ.SEARCHES
我们提供了2015年9月12日至10月20日两个LIGO探测器之间16天同时观测的分析结果。这是改进 LIGO于2016年1月12日结束的第一个观测期的数据的子集。可以通过两种不同类型的搜索来可靠地检测到GW150914。 一个目标是使用最佳匹配滤波和广义相对论预测的波形,从紧凑对象的合并中恢复信号。其他搜索以广泛的通用瞬态信号为目标,而对波形的假设则最少。 这些搜索使用独立的方法,并且它们对检测器噪声的响应由不同的,不相关的事件组成。但是,两次搜索都有望检测到来自二元黑洞合并的强烈信号。
每次搜索都会识别在两个天文台都与站点间传播时间一致的候选事件。 为事件分配一个检测统计值,该值对它们成为引力波信号的可能性进行排名。 候选事件的重要性由搜索背景确定,即检测器噪声产生具有等于或高于候选事件的检测统计值的事件的速率。 估算此背景非常具有挑战性,原因有二:检测器噪声是非平稳且非高斯的,因此必须凭经验确定其属性; 并且不可能将探测器屏蔽于引力波之外以直接测量无信号的背景。 两次搜索所用的估计背景的具体步骤略有不同,但是都使用时移技术:一个检测器数据的时间差被人为地移动了与站点间传播时间相比较大的偏移量,并且 根据此时移数据集产生新的事件集。 对于检测器之间不相关的仪器噪声,这是估算背景的有效方法。 在此过程中,一个检测器中的引力波信号可能与另一检测器中的时移噪声瞬变相一致,从而有助于背景估计。 这导致对噪声背景的高估,因此对候选事件的重要性进行了更为保守的评估。
非高斯噪声的特征在不同的时频区域之间变化。 这意味着在被搜索信号的整个空间中,搜索背景并不均匀。 为了最大程度地提高灵敏度并提供对事件重要性的更好估计,这些搜索根据其时频形态将其背景估计和事件候选者分类为不同类。候选事件的重要性是根据其类别的背景来衡量的。 为了说明已经搜索过多个类别,此重要性会因等于类别数量的试验因子而降低。
- Generic transient search
设计为在没有特定波形模型的情况下运行,此搜索可在检测器应变数据的时间频率表示中识别出一致的多余功率,信号频率高达,持续时间长达几秒钟。搜索使用多探测器最大似然方法在两个探测器中重建与通用引力波信号一致的信号波形。根据检测数据对每个事件进行排名,,其中是通过互相关两个重构波形获得的无量纲相干信号能量,En是从数据中减去重构信号后的无量纲残余噪声能量。 统计量因此量化了事件的SNR和两个检测器之间数据的一致性。
根据事件的时频形态,将事件分为三个互斥的搜索类别,如[41]中所述:已知噪
剩余内容已隐藏,支付完成后下载完整资料

英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[595863],资料为PDF文档或Word文档,PDF文档可免费转换为Word

