
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
使用视频传感的智能失窃车辆检测
Rami Al-Hmouz, Subhash Challa
悉尼科技大学网络传感器技术实验室,
ralhmouz,schalla@ eng.uts.edu.au
摘要
本文着重讨论了在各种照明条件下自然图像的颜色识别问题。 车辆最有可能的颜色是在车牌周围的汽车影像的不同区域估计的,并且这些区域的结果使用着名的贝叶斯规则进行融合。 本文还提出了信息融合增强彩色识别技术在被盗车辆识别中的应用。 基本方法是基于联合估计车牌字符和车辆的其他特征(如其颜色和类型)并将其与注册车辆数据库匹配。 如果存在不一致性,则所提出的方法将被观察的车辆归类为可能被盗。
关键词:模式识别,颜色识别,ALPR。
1.引言
自动车牌识别(ALPR)是一个有前途的研究领域,它具有无人值守的停车场[1],限制区域的安全控制[2],交通执法[3]和自动收费[4]等众多应用领域。根据不同的工作环境,ALPR技术因应用的不同而不同。
通常,LPR算法通常由三个处理步骤组成,即提取牌照区域,从板区域分割字符以及识别每个字符。 根据形状,对称性[5],高宽比[7],颜色[6]和强度值的变化[9]确定提取的车牌区域。字符分割过去通过以下技术完成: 投影[10],放松标记[11]和斑点着色。 使用的字符识别技术包括遗传算法[6]和人工神经网络[8]。
机器视觉中的色彩已用于分割,跟踪和识别等任务。 Swain和Ballard [17]描述了使用直方图进行建模的方案。 在对象识别中,环境使用颜色来区分对象。 在不同的照明条件下,由于光源的不同物理属性,颜色的外观会发生变化,这个问题被称为颜色恒定性。 色彩恒定性算法估计环境光源并补偿光照条件的变化。 Barnard [19] [20]讨论了许多领先的算法,包括灰色世界[21],色域映射[22],神经网络方法[23]和色彩相关CBC [24]。
在本文中,引入了颜色识别ALPCR的自动车牌识别车辆; 我们使用车牌字符识别和颜色估计系统来识别车辆的颜色和盘子。 两个系统的结果都相互关联,以识别修改后的被盗车辆。 在车牌识别中,将车牌定位在图像中对识别尤为重要; 采用基于颜色的技术来提取平板车辆颜色通过颜色直方图在平板周围的三个区域中识别,并且使用贝叶斯定理将结果彼此融合。 ALPCR在不同的照明条件下进行测试,并且使用Color Correlation技术[24]在图像上对估计的光源进行补偿。
本文的结构如下。 我们首先在第2节提供ALPCR的结构,第3节将介绍颜色识别CR。在第4节中,我们讨论使用相关性算法的颜色的光源估计。 第5部分涵盖实验结果。 最后,第6节将介绍结论和未来的工作。
2. 自动牌照的结构识别
ALPR系统的典型结构由四个模块组成:
. bull; 图像采集模块:采集图像并将其送入系统输入。
bull;LP提取模块:从视频序列中获取并定位平板图像。
bull;字符分割模块:分隔字符。
bull;字符识别模块:识别图像中的字符。
添加一个模块以识别车辆的颜色。 图1显示了ALPCM的系统结构。
图像采集模块ALPR系统的第一步是从数码相机获取帧(图2)。 相机的放置和画面质量选择,以协助ALPR获得最佳的车辆图像,然后将其传递到下一个模块。
ALPR
图1:提出的ALPCR结构
图2:图像获取
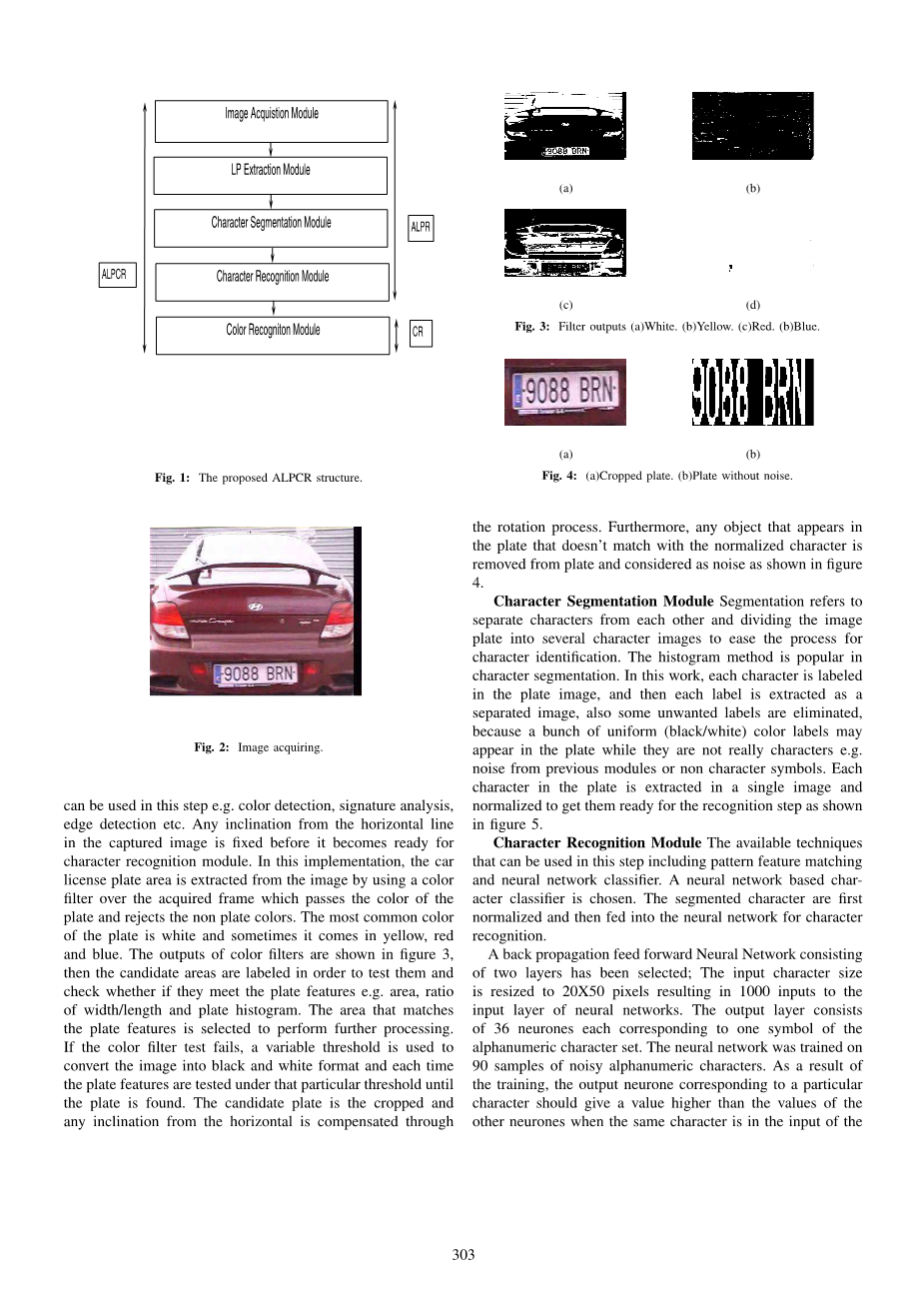
LP提取模块此步骤用于从捕获的图像中确定平板坐标。在这个步骤中可以使用许多技术,例如颜色检测,签名分析,边缘检测等。捕获图像中水平线的任何倾斜在其准备好字符识别模块之前都是固定的。在该实施方式中,通过在获取的通过板的颜色的框架上使用滤色器从图像中提取汽车牌照区域,并且拒绝非板的颜色。该板最常见的颜色是白色,有时呈黄色,红色和蓝色。滤色器的输出如图3所示,然后标记候选区域以测试它们并检查它们是否符合板特征,例如面积,宽度/长度比和平板直方图。选择与板特征匹配的区域以执行进一步处理。如果颜色过滤器测试失败,则使用可变阈值将图像转换为黑白格式,每次在特定阈值下测试印版特征直至找到印版为止。候选板块被裁剪,通过旋转过程来补偿水平方向的任何倾斜。此外,板中出现的与标准化字符不匹配的任何对象将从板上移除,并被视为噪声,如图4所示。
(a) (b)
(c) (d)
图3:滤波器输出(a)白色。(B)黄色。(c)中红色。(b)中蓝。
(a) (b)
图4:(a)裁剪板。 (b)无噪音板。
字符分割模块分割是指将字符彼此分开,并将图像板分成几个字符图像,以简化字符识别过程。 直方图方法在字符分割中很流行。 在这项工作中,每个字符都标记在印版图像中,然后将每个标签作为分离的图像提取出来,同时也消除了一些不需要的标签,因为一些统一的(黑/白)颜色标签可能出现在印版中,而他们 并不是真正的角色,例如 来自之前模块或非字符符号的噪音。 如图5所示,将板中的每个字符提取到单个图像中并进行标准化,以使它们准备好进行识别步骤。
字符识别模块可用于此步骤的可用技术包括模式特征匹配和神经网络分类器。 选择一个基于神经网络的字符分类器。 首先对分段字符进行归一化,然后将其馈送到神经网络进行字符识别。
已选择由两层组成的反向传播前馈神经网络; 输入字符大小调整为20X50像素,导致1000输入到神经网络的输入层。 输出层由36个神经元组成,每个神经元对应一个字母数字字符集的符号。 神经网络训练了90个嘈杂的字母数字字符样本。 作为训练的结果,当相同的字符在神经网络的输入中时,对应于特定字符的输出神经元应该给出高于其他神经元的值的值,如图6所示。
对于神经网络,输出层中的每个节点都与一个字符Ck关联,输出变化范围为0到1.NN输出被归一化并用作每个字符后验概率的估计[14]:
(1)
图5:板块分割
图6:神经网络特征
3.颜色识别
在被盗车辆情况下,被盗车辆的颜色对识别它很重要,但如果有人说被盗车辆的颜色是午夜蓝色,则确切的颜色不会添加太多信息,但在大多数情况下,“午夜”这个表达方式是冗余信息 ,以及人们无法想象确切的颜色,相反,我们可以简单地说,被盗的汽车是蓝色的。 颜色分为八个乐队:白色/蜡笔,灰色,蓝调,绿色,黄色,褐色/深红色,橙色/红色和粉红色/紫罗兰。 测试直方图中最高的两个引脚是否属于同一颜色类别。 此外; 不同的相机和不同的光源会给出不同的像素强度,因此当强度发生变化时,颜色直方图并不能提供准确的颜色照明[18]。 然而,为了从图像中消除光源的影响,现有技术(第4节将讨论相关的颜色)来估算环境光源。
颜色直方图是通过计算图像阵列中具有相同颜色的像素的数量获得的。在直方图计算之后生成150种颜色的分布,对于每个测试区域,在R周围使用阈值为50的滤色器, G和B颜色值,例如,如果过滤器是红色(256,0,0),则值在范围(256-206,0,0)内的值被认为是红色。 对滤波器输出像素进行计数以形成颜色直方图。
板块周围的区域很可能会有一个粗略的颜色决定。 由于照明和阴影问题,所有三个区域(图7)中的像素都被选定来识别颜色。 通过直方图归一化获得每个区域中的颜色分布,并且将来自所有区域的结果相互融合以获得全部颜色直方图。
图7:选定的区域
设
是区域n的颜色概率密度函数,其中m是直方图箱(颜色)的数量。 因此,图8所示的区域1的颜色概率密度函数是:
当获得第二区域图9的直方图时,通过贝塞斯反演计算Ck的整体字符后面
(2)
由于所有地区都是相互独立的:
图8:区域1的颜色直方图
图9:区域2的颜色直方图
那么
其中p(R1),p(R2)和p(Ck)是归一化部分。 因此
(3)
其中是标准化术语
递归的更新是对测量的有条件的不确定性的简化[?]这意味着
(4)
在我们的例子中,三个区域的结果组合在一起p(C / R1,R2R3),颜色直方图应该是几个彼此接近的峰值,以表示汽车的颜色,如图10所示。
4颜色相关CBC
图11显示了不同illumi国家下的同一辆车。 色彩稳定性算法回答了我们如何使图像颜色保持恒定的问题,无论光线条件如何。
|
0.35 |
||||||||||
|
White/Pastels |
Grays |
Blues |
Greens |
|||||||
|
= |
0.3 |
Reds/ |
||||||||
|
Yellows |
Browns Oranges Pinks/Violets |
|||||||||
|
0.25 |
||||||||||
|
p(C/R1,R2,r3) |
0.2 |
|||||||||
|
0.15 |
||||||||||
|
0.1 |
||||||||||
|
0.05 |
||||||||||
|
0 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
||
|
0 |
||||||||||
|
Colors |
||||||||||
场景的摄像机响应(图像)取决于物体的物理特性和反射特性S(lambda;),发光体E(lambda;)的光谱功率
全文共9585字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[10040],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

