
英语原文共 18 页
光学通信349 (2015)65-82
内容列表可在ScienceDirect上找到
杂志主页:www.elsevier.com/locate/optcom
光学通信
基于光联合变换相关的运动跟踪系统性能评估
埃尔布兹a, a .苜蓿a,n, c .布罗索b, n .本·哈吉·亚希亚a, s .阿拉姆c
a Equipe Vision, L@BISEN, ISEN-Brest, Cuirasse Bretagne街20号CS 42807, Brest Cedex 2 29228,法国b大学,Lab-STICC, CS 93837, Le u大道6号,Brest Cedex 3 29238,法国
南阿拉巴马大学电子与计算机工程系,美国南阿拉巴马大学6001
a r t i c l e i n f o b s t r a c t
|
文章历史:2015年1月30日收到修改后的表格2015年3月9日接受2015年3月10日可在线获得2015年3月18日 |
我们提出了一个优化的系统,专门为跟踪和识别移动的对象在一个有限的环境(如一个老人留在家里)。在研究的第一步中,我们使用VanderLugt相关器(VLC)对输入平面进行自适应预处理,并通过非线性函数对相关平面进行后处理,使我们能够做出稳健的决策。第二步是基于光联合变换相关(JTC)的系统(NZ-NL-correlation JTC),实现对受限空间中移动的人的改进检测和跟踪。该系统具有较强的识别能力和鲁棒性,能够检测输入场景中的未知目标,并在目标运动时确定目标的运动轨迹。该系统在多种情况下(如输入面旋转变化)都能提供对运动目标的鲁棒跟踪性能。实验结果表明,该系统特别适合于运动目标的实时检测和跟踪。爱思唯尔版权所有 |
|
关键词:光学相关 |
|
|
Joint transform correlation |
|
|
鲁棒性 |
|
|
歧视 |
|
|
运动检测 |
|
|
跟踪 |
1. 介绍
近年来,针对老年人和残疾人开发跌倒检测系统和辅助domotics,使他们能够独立生活的兴趣不断增长[1,2]。在这些引人注目的发展过程中,设计一个鲁棒可靠的实时检测和跟踪系统,在有限的空间内对一个移动的人进行检测和跟踪仍然是一个挑战。随着年龄的增长,想呆在家里是很自然的。然而,回过头来看看全局可以帮助你决定长期呆在家里是否真的是正确的一步。很多时候,离开家的决定都是在突然失去亲人或遇到紧急情况后突然做出的,这让调整变得更加痛苦和困难。为了维护老年人和残疾人的独立和安全,越来越多的家庭正在实施家庭自动化。这些智能家居让老年人和残疾人可以呆在他们觉得舒服的地方,而不是搬到昂贵的医疗机构。对于残疾人来说,智能家居给了他们独立的机会,这将帮助他们获得信心和决心。智能家居可为长者及残疾人士提供多种不同类型的紧急援助系统、保安设施、防止跌倒、
n通讯作者。
电子邮件地址:ayman.al-falou@isen.fr (A. Alfalou)。http://dx.doi.org/10.1016/j.optcom.2015.03.020爱思唯尔版权所有
自动定时器和警报[3-8]。这些系统使个人在家中感到安全,因为他们知道援助只需要几分钟的时间。此外,智能家庭系统将使家庭成员能够通过互联网从任何地方观察他们的亲人。
在这项工作中,我们开发了一个优化的系统,专门为跟踪和识别移动的目标从图像的视频文件。模式识别体系结构已得到广泛的研究和应用。在这里,我们将只关注光学架构[9-16],并开发一种包含VLC的目标识别识别方案和JTC的受限空间目标跟踪方案。这种非侵入性的系统可以是一个可行的解决方案,以帮助人们在家里。
将目标图像(要识别的图像)与参考图像(来自数据库)关联起来的思想由来已久。VLC的基本协议如下:VLC的光学设置有三个平面,输入平面(目标图像)、傅里叶平面和相关平面。从一个平面到另一个平面是通过两个收敛透镜完成的,通过相关滤波器(由参考图像数据库制作)将目标图像频谱相乘,实现输入和傅里叶平面的傅里叶变换。通过对这个乘积的FT求倒数,就得到了一个相关平面。与其他算法相比,VLC算法的主要优点是简单、对目标图像的全局处理、良好的决策能力
M. Elbouz等/光学通信349 (2015)65-82 66
与所述数值方法相比,它的性能以及同时检测、定位和识别场景中的目标图像的能力。提出了不同的相关滤波器,如纯相位滤波器(POF)[11]、调幅POF (AMPOF)[12]、最大平均相关高度(MACH)滤波器[14]、最小平均相关能量(MACE)滤波器[15]和复合滤波器[16]。POF的两个主要特点是提高了光学效率和识别目标的能力。由于POF只使用参考相位,因此可以作为边缘检测。然而,众所周知,POF对目标图像中包含的旋转、尺度和噪声的微小变化都非常敏感。它也不适应彩色图像。AMPOF对目标图像相对于参考图像的旋转和缩放不具有鲁棒性。复合过滤器允许合并不同的参考图像,从而减少了用于获得可靠决策的过滤器的数量。由于我们关注的是视频序列,我们将考虑在鲁棒性和分辨性之间有很好的折衷的复合滤波器。跟踪将依赖于JTC体系结构。最后,对几种方法进行了比较,证明了该方案的良好性能。
在这项工作中,我们详细介绍了一个框架,它允许我们在场景中检测给定的人,在有限的空间中跟踪这个人,并确定他或她移动时的轨迹。为此,我们使用了一个由两部分组成的并行系统。第一个是基于优化的基于vlc的识别方案。我们在相关平面上定义并使用自适应非线性函数来显著提高决策性能。第二部分考虑了基于一种新的结构的光学JTC跟踪,使我们在鲁棒性和分辨性之间得到了很好的折衷。实验验证了基于运动的人脸再认知过程对人脸旋转的识别能力和鲁棒性。
本文其余部分的结构如下。我们工作的介绍首先在第2节中详细介绍了光学相关的基本原理[10-25],即VLC用于识别。强调了分段复合POF的良好性能,以及利用输入平面的预处理和相关平面的后处理的优点。同样,我们在第3节中考虑使用JTC跟踪移动人员的位置。然后,我们描述了数值实验,以说明所提出的跟踪方法的有效性。使用两个指标(联合功率谱上的相关峰值半径和非线性程度)作为相关滤波器的最佳分辨和鲁棒性指标,极大地促进了分析的进行。我们已在第4节进行计算,以量化本计划的表现。这些数值研究表明,利用一种新的关联结构nl - nz - correlationship - jtc可以控制关联的灵敏度(鲁棒性和分辨性)。此外,在第5节中,将该方法对人脸旋转鲁棒性的实现程度与现有方法进行了比较。除了发展前几节所讨论的数值方法外,我们还对我们设计的用于人脸识别的ma-chine-vision传感系统进行了初步测试。此外,在本节中,我们展示了实验结果,并成功地对给定目标进行了实验跟踪(视频演示了我们的方案的良好性能)。最后,第6节总结了我们的结论。进一步的技术细节在两个附录中提供。
2. 相关性和识别
在本节中,我们首先回顾标准VLC
由VanderLugt[24]引入用于光学模式识别。然后,我们建立符号,以用于论文的其余部分。将目标图像(待识别的图像)与参考图像(来自数据库)相关联的思想由来已久[3-25]。由于相关技术具有很强的识别能力,对各种噪声具有很强的鲁棒性,并且允许我们同时识别和确定场景中特定图像的空间位置,因此最近重新燃起了人们对相关技术领域的兴趣。利用MATLABs软件包对VLC的性能进行了研究。
我们首先考虑POF,并证明预处理可以显著降低噪声对VLC相关性能的影响。预处理包括利用HSV颜色法或级联分类器对Haar特征[1]选择所考虑人脸的特定区域。在后面的第5节中,我们将制作一个过滤器并统一这两种方法。
2.1.使用POF的VLC
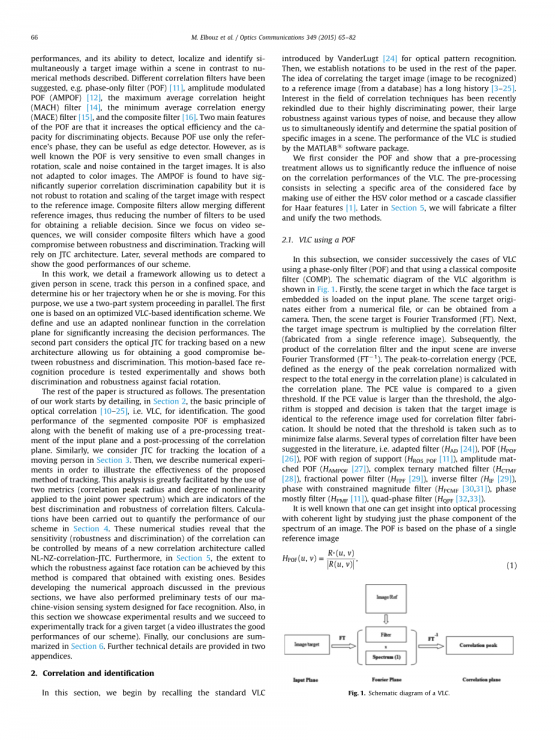
在本小节中,我们将依次考虑使用纯相位滤波器(POF)和使用经典复合滤波器(COMP)的VLC的情况。VLC算法原理图如图1所示。首先,将嵌入人脸目标的场景目标加载到输入平面上。场景目标要么来自数字文件,要么可以从摄像机中获取。然后,对场景目标进行傅里叶变换(FT)。然后,将目标图像频谱乘以相关滤波器(由单个参考图像制作)。然后对相关滤波器与输入场景的乘积进行傅里叶逆变换(FT 1),在相关平面上计算峰值到相关能量(PCE,定义为峰值相关归一化后的能量相对于相关平面上的总能量)。将PCE值与给定的阈值进行比较。如果PCE值大于阈值,则停止算法,并判断目标图像与用于相关滤波器制作的参考图像是否相同。应该注意的是,阈值是用来最小化错误警报的。已经提出几种类型的相关性过滤器的文学,即适应滤波器([24]),POF(HPOF[26]),POF的地区支持(HROS_POF[11]),振幅匹配POF(HAMPOF[27]),复杂的三元匹配滤波器(HCTMF[28]),部分电力滤波器(HFPF[29]),反滤波器(低氧诱导因子[29])阶段限制级过滤器(HPCMF[30、31]),主要阶段过滤器(HPMF[11]),quad-phase过滤器(HQPF[32、33])。
众所周知,人们可以通过研究图像频谱的相位分量来深入了解相干光的光学处理。POF是基于单个参考图像的相位
H u v R u v
R u v
(,) (,) (,) (1)POF =
⁎
图1.所示VLC的原理图。
M. Elbouz等/光学通信349 (2015)65-82 67
图2.所示(a)目标图像,(b)参考图像,(c)用POF (x轴)得到的自相关平面。
其中u和v是独立的频域变量。POF的主要特点是提高了光学效率。POF除了能够获得非常窄的相关峰外,还具有识别目标的能力。由于POF只使用重移情的相位,所以它可以作为边缘检测器。然而,众所周知,POF对目标图像中包含的旋转、尺度和噪声的微小变化也非常敏感。为了克服这两个问题,我们首先在目标和参考图像中选择一个特定的区域(图2(a))。这使得我们得到的相关平面比考虑整个场景的情况噪声小。基于该策略,图2(c)显示了一个基于POF的VLC的自相关关系,该VLC使用来自于指向头姿态图像数据库(PHPID)[34]的特定参考图像制作而成。从图2 (a)和(b)中显示的两幅图像非常相似,可以看出,自相关峰高且窄。
测试的可靠性VLC对旋转表1中我们使用数据库,对应于一个人从PHPID涉及面部旋转90°和thorn;90°(左列)。利用图1所示的步骤,利用图2(b)所示的参考图像来制定POF。第二列所示的结果标明相关峰的存在与变化从90°旋转thorn;90°,从而证明VLC对旋转的鲁棒性。
有几句话是适当的。从表1中可以看出,在0°对应的情况下,自相关峰更高更窄,即PCE更大,其他角度的PCE值越小,说明识别度越低。但即使是小角度为5°的旋转,该相关器也不能准确识别人脸(图3)。
2.2.输出平面的优化
总的来说,我们在表1中或多或少观察到一个单参考POF的噪声相关峰值,这与图3中较小的PCE值相关。这是由于相关强度噪声随着目标图像相对于参考图像(0°)旋转角度的增大而增大。为了显著降低这种强度噪声,将相关平面与非线性函数f(x) exp(x) 1 y =minus;相乘,其中x为相关平面的像素,y为常数值41。相关平面的每个像素为
在计算PCE之前乘以这个函数。利用人脸在输入平面上的选定区域和在输出平面上与非线性函数的乘法,实现了一种更鲁棒的相关复合滤波器。
2.3.使用COMP的VLC
一般情况下,仅通过将目标图像与一个滤波器(即单参考)进行比较,得到一个单一的相关性,并据此做出决策,不能得到可靠的识别。为了缓解这一缺陷所带来的问题,提出了多种相关方法。采用经典复合滤波器(COMP)[35]实现VLC结构的多相关。基本思想是通过线性组合几个引用来合并它们,例如
H u, v a R u, v () (), (2)i
其中R u, v () i为各参考光谱,ais为权重因子。图4为复合滤波器的相关过程示意图。
表2列出了重要参数的自相关与一个例子使用VLC复合过滤用相对应的六个参考图片制作的角度(90°30°,0°,thorn;30°,thorn;60°,thorn;90°),和ais设置为1。
由表2可以看出,在使用COMP滤波器的情况下,两幅图像的相关峰值(790°)要高于POF(表1)。一方面,我们认为类似的参考图像的(蓝线,即P1-P1旋转:[90°,thorn;90°))。另一方面,一个不同的人的一组图像(绿线,即P1-P2旋转:[90°,thorn;90thorn;])。使用PHPID。值得注意的是,无论旋转角度是多少,滤波器的分辨性能都保持良好。
复合滤波器具有良好的识别能力和鲁棒性之间的平衡。由于它们是基于光谱融合的,因此可以大大减少做出可靠决策所需的关联数。然而,在经典的复合滤波器中,增加滤波器中引用的数量会导致局部饱和现象。这可以用最近提出的光谱加以补救
M. Elbouz等/光学通信349 (2015)65-82 68
表1
与POF的相关结果。左列显示面部数据库与旋转90°thorn;90°;中间一列表示对应的三维相关平面,右边一列表示PCE值(x轴、y轴表示图像大小,z轴表示相关峰值高度
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

