英语原文共 12 页
针对不可靠的通信改进 PID 控制
作者:
宋建平,Aloysius K. Mok,德克萨斯大学奥斯汀分校计算机科学系,德克萨斯州 78712
陈德基, Mark Nixon,Terry Blevins, Willy Wojsznis艾默生过程管理实验室3号楼 12301 号研究大道德克萨斯州奥斯汀 78759
关键词:
PID 算法,无线通信,分布式控制系统-DCS,不可靠通信
摘要
对于标准的工业过程控制系统,控制回路中的块会定期执行。也就是说,传感器以固定的速率将采样数据反馈给控制块。以同样的速度,控制块对输入进行一些计算,并向执行器发送命令。这种模式适用于可靠的有线网络,如现场总线和过程现场总线。然而,将来无线网络很有可能取代部分有线网络。对于无线网络,我们预计会出现间歇性的通信损失。在本文中,我们首先明确了在通信丢失的情况下,标准 PID 算法的动态响应的差的表现。针对这些情况,提出了一种改进的 PID 算法来改善动态响应。当没有通信损失时,增强的 PID与标准 PID 表现完全相同。丢失的数据由增强的 PID 块中的积分分量补偿。重新建立通信时,增强 PID 块中的导数分量消除了输出中可能出现的尖峰。我们在几个无线场景下评估了增强的 PID 算法。结果表明了改进的 PID 算法的优越性。
1 、介绍
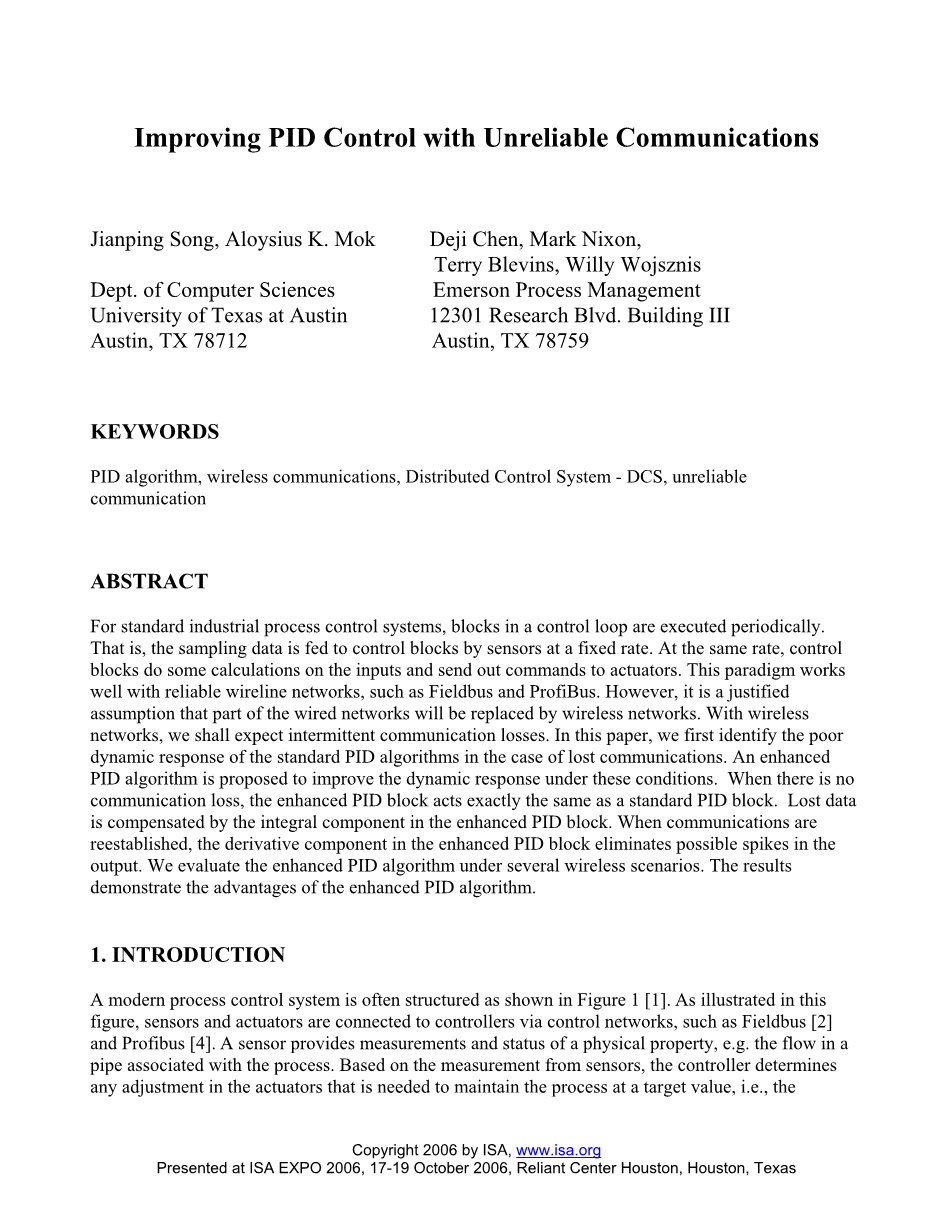
现代过程控制系统通常是如图 1 [1] 所示的结构。如图所示,传感器和执行器通过控制网络连接到控制器,如现场总线 [2] 和过程现场总线 [4]。传感器提供物理特性的测量和状态,例如与工艺相关的管道中的流动。基于传感器的测量,控制器确定将过程保持在目标值即设定点所需的执行器中的任何调整。控制循环以足够快的速度定期执行,以纠正过程中任何不想要的偏差。
图 1. 一个过程控制系统
在某些应用中,希望用无线网络 [5,6] 取代有线控制网络。一些合理的理由包括降低成本和加强控制。因此,无线控制的许多标准努力正在积极进行。例如,ZigBee 是主要针对工业制造和办公自动化的无线标准。ZigBee 规范V1.0 于 2004年底获得批准,市场上随时可以买到符合 ZigBee 标准的产品 [7]。ISA [3] 也有一个非常活跃的无线标准委员会 SP100。足够说明无线过程控制正在成为现实。
与非无线控制系统相比,无线控制系统中的通信本质上是不可靠的。干扰、电源故障和雷电等环境因素可能会导致这种不可靠。不幸的是,目前的控制策略是基于可靠通信的假设。在标准的过程控制系统中,一个IO 通信丢失被认为是错误的。通常,控制环路配置了最大数量的可丢失 IO 通信,超过该最大值后环路报错,并根据故障安全配置设置值。
因此,对于标准控制范式来说,不可靠的通信是一个非常具有挑战性的问题。考虑一个带有无线信道输入的 PID 块。假设输入在t1时刻丢失并在t2时刻重建。PID 的导数分量会导致输出在t2时刻产生一个一个尖峰。此外,从t1到t2,重置组件可能会因时间t1存在的错误而结束。
本文重点研究了目前应用最广泛的控制模块 -- PID 模块。我们通过检测通信丢失来修正 PID 算法的积分和导数分量的计算,并主动补偿。在多个无线场景下的仿真结果证明了改进的 PID 算法的优越性。
本文的其余部分组织如下。第二节分析了标准 PID 块在处理间歇性通信缺失时存在的不足。第三节介绍了增强的 PID 算法。第四节介绍了实验和结果。第五节总结了本文。
2.标准 PID 算法
PID 是工业过程控制中应用最广泛的控制算法 [9]。如图 2 所示,控制器将过程变量 (PV) 与参考设定点 (SP) 进行比较。然后,用该偏差计算新的输出,将 PV 带回其期望的 SP [10]。
PID 代表“比例、积分和导数” 的算法分量。这三个组件中的每一个都执行不同的任务,并对系统的功能产生不同的影响。他们的输出叠加起来产生系统输出。
图 2.PID 块
尽管 PID 算法有许多变化,但在没有速率限制的非交互形式和所有基于误差的动作中,标准 PID 算法的方程是:
和分别是比例、积分和导数增益。
数字PID 算法的软件实现基于周期性提供的过程变量 PV 采样数据。
当没有通信损失时,PID 一旦针对它所控制的过程完成配置,就会使过程处于稳定状态。图 3 (a) 显示了对过程中存在扰动的 PID 反应。
在时间 之前PID 输出保持在恒定值以保持过程变量PV在SP设定值。由于过程干扰,在观察到 PV 下降。为了纠正下降,PID 增加了它的输出。在时间 t2, 过程变量PV回到SP,并且控制器输出稳定在比其原始值稍大的某个值,以补偿干扰。如图 3 (a) 所示,控制器输出是 P 、 I 和 D 三部分的总和。
图 3.输入丢失情况下标准 PID 块的响应
2.1 输入通信丢失
如果传感器输入的通信在时间t1和t2之间丢失,现在考虑一下控制器输出的每个组件会发生什么?对于 PID 块,在此期间过程变量PV测量值与时间t1时刻保持相同,如图 3 (b 、 c 、 d) 所示。图 3 (b) 显示了比例增益 P的变化。因为过程变量PV的测量值和设定值SP保持不变,从 t1到 t2比例增益是常数。图 3 (c) 显示了积分部分I的变化。过程变量PV的测量值和设定值SP保持不变,误差保持不变,所以积分部分是从 t1到 t2线性增加的直线。图 3 (d) 显示了微分部分 D的变化。过程变量PV的测量值和设定值SP保持不变,误差保持不变,所以导数从 t1到 t2 保持为0。结果, PID 块的输出是从 t1到 t2的线性增加线,如图 3 (b 、 c 、 d) 所示。这种输入通信丢失破坏了(PID控制的正常)进程。失去沟通的时间越长,过程变量PV的测量值和设定值SP偏差越大。
一旦在 t2重新建立了通信,PID 恢复正常。然而,由于在时间 t2计算的导数部分是基于在 t2和t2前一段时间过程变量PV的测量值的差,,我们预计微分部分会出现尖峰。这是因为过程变量PV的测量值在t1 处的值在t2前一直保持不变。过程变量PV的测量值在t1和t2有了很大的变化,我们预计微分部分产生的峰值会更大。由于比例部分和微分部分的突然变化,控制器的输出在t2前后会有很大的波动。
2.2 输出通信丢失
如果t1和t2之间的输出通信丢失,我们将继续分析标准PID的行为。在这里,我们假设没有其他干扰并且输入通信没有问题。
图 4.输出丢失的标准 PID 块
在t1时刻之后,执行器将与保持t1时刻值不变的(控制器)输出保持一致,直到一个新的输出值被收到。这将导致过程变量测量值PV最终到达SP,之后略微超出SP,如图 4 (b,c,d) 所示。P 、 I 和 D 分量都是根据当前 PV计算的,如图 4 (b 、 c 、 d) 所示。这是我们从 PID 中可以预期的。唯一的缺点是,执行器输出值从t1计算的到t2计算的有点剧变。
2.3 输入和输出通信丢失
当输入和输出通信都丢失时,PID的行为与图 3 中仅丢失输入通信时相同。唯一不同的是,当通信在 t2重新建立时,实际过程变量PV是不同的。在这种情况下,实际过程变量PV游走较少,因为执行器的输出保持不变。同样,执行器收到一个输出值的凹凸变化。
3.增强 PID 算法
在上述PID算法的数字实现中,基本假设是该算法是定期执行的。当包含测量值的输入丢失时,计算的重置操作可能不再合适[1]。当之后新的测量来时,计算的导数动作可能会在输出中产生尖峰。如果 PID 块继续使用上一个过程变量执行,则输出将根据上一个测量的过程变量和设定点之间的重置方向和偏差继续移动。如果控制块仅在新的测量值到达时执行,那么这可能会延迟对设定点变化的控制响应和对可测量扰动的前向动作。此外,当控制执行后,根据执行的计划周期或自上次贡献以来的时间,来计算重置贡献可能会导致流程可变性的增加[1]。
在 [1] 中,我们提出了一种增强的 PI 算法,在不显著影响控制性能的情况下减少传感器和控制器之间的无线通信。在此基础上,我们进一步改进了导数部分,并将新算法应用于通信丢失问题的解决。
为了在测量没有定期更新时提供最佳控制,可以对 PID 进行重构,以反映自上次测量更新以来预期过程响应的重置和导数贡献。图 5 展示了这样做的一种方法。
如图 5 所示,重置/速率贡献 (PID 的积分/导数部分) 是基于使用通信堆栈中的新值标志来确定的, 与 [1] 中的想法相同。为了考虑过程响应,当接收到新的测量时,过滤器输出以以下方式计算:
其中=新的过滤器输出,=上次执行的滤波器输出,=上次执行的控制器输出,
=上次传递新值以来经过的时间。
图 5 增强 PID 算法应用
由于在积分计算中使用了在执行器位置反馈中的最后一个传达的执行器位置,这将自动补偿传达给下游元件的输出中的任何损失。
此示例的导数部分 (未应用速率限制) 由以下等式确定:
其中= 当前错误,= 最后一个错误, = 自传达新值以来经过的时间,= 控制器导数项。
当输入丢失几个周期时,考虑导数部分的贡献。重新建立通讯时,在上面的等式中,原始算法和修改算法是相同的。然而,对于标准 PID 算法,导数部分的除数将是周期,而新算法中的除数是两个成功接收的测量值之间的经过时间。显然,与标准PID 算法相比,改进后的算法会产生更小的导数。
标准 PID 算法在处理通信丢失时存在两大问题: 通信丢失时继续执行,通信重建时输出突然变化。增强的 PID 算法通过只在建立通信时计算积分和微分分量,并将执行器反馈纳入复位计算来解决这些问题。
4.实验及结果
为了验证我们的算法,我们做了几个实验。首先,我们证明了当通信可靠时,新算法会产生与常规算法相同的结果。然后,当通信不可靠时,修正后的算法比现有的 PID 算法具有更好的性能。
4.1 实验装置
我们创建了两个简单的 PID 控制回路,如图 6 所示。
PROC1 和PROC2 是两个相同的过程,每个过程由一个延迟 1 秒、6 秒和 3 秒的时间常数的二阶过程组成。在 PIDPLUS 中实现了改进的 PID 算法,PID2 是标准的 PID 块。PID2 的参数是通过用整定应用程序测试来确定的,该应用程序建议增益为0.85,复位为 10.71,速率为 1.71。然后将PIDPLUS 的整定参数设置为与 PID2相同。PIDPLUS 被配置为使用重置组件的 BKCAL_IN 值。通过 COM_IN1 和 COM_IN2 块模拟过程变量通信,由COM_STATUS_IN 控制。如果将 COM_STATUS_IN 设置为 1,则阻止 COM_IN1 和COM_IN2测量(通信)准确。否则,这两个块会丢掉测量值。以相同的逻辑使用 Com_Out1 、 Com_Out2 和 COM_STATUS_OUT应用于输出。
所有块的扫描速率设置为 0.2 秒。最初,对过程的不受控制的干扰 (扰动) 是 20。
图 6. 实验设置
通过改变外部设定点并引入一些对每个 PID 和相关过程产生同等影响的扰动,我们可以评估两个 PID 模块的性能。在性能块中收集两个 PID 块的性能。本文使用的度量标准是绝对误差积分 (IAE)。
4.2 可靠的通信
为了模拟可靠通信的情况,我们设置了 COM _ STATUS _ IN 和 COM_STATUS_OUT 更改为 1。SP从 50 更改为 60。结果如图 7 (从 11:10 到 11:11) 的左侧部分所示。
AI1/OUT.CV 的曲线与 AI2/OUT.CV 的曲线非常匹配,AO1/SP.CV 与 AO2/SP.CV 的曲线非常匹配。因此,我们得出结论,当通信可靠时,两个 PID 块的工作方式相同。
4.3 通信不可靠
为了研究不可靠通信对两个 PID 块的影响,我们考虑了两种情况:输入不可靠,输出不可靠。
4.3.1 输入不可靠
在输入丢失期间,在 PID 块中维维持并使用最后一个通信的过程变量。我们首先尝试改变设定点。结果显示在图 7 的右侧,其中 SP 从 60 减少到 50。
当输入通道关闭时,输入到 PID 块的设定点和过程变量之间的偏差是一个常数。对于标准的 PID 模块 PID2,积分部分将继续积分,这解释了 AI2/OUT 和 AO2/SP 的线性递减。然而,由于它有一个通信丢失的标志,PIDPLUS 会在通信丢失期间简单地冻结重置组件,这解释了 AO1/SP 在通信丢失期间的平稳。AO1是一个常数值,PROC1 的过程变量逐渐接近设定值,如 AI1/OUT 所示。
当通信重新建立时,PIDPLUS/PID2 的输入过程变量分别反映了 AI1/AI2 提供的真实测量。对于 PID2,与设定值相比,AI2/OUT相比于设定值 非常低,这导致 PID2 的导数部分在通信重新建立的那一刻急剧激增(造成尖峰)。对于PIDPLUS,AI1/OUT 接近设定值,新算法导数部分使用的除数进一步消除了小偏差。因此,AI1 和 AO1 顺利地过渡到它们的稳定状态。
图 7. 输入丢失情况下设定点变化的曲线
性能数据进一步证明了两种 PID 控制器的不同行为。在 121 秒的持续时间内,PIDPLUS 的 IAE 为 169,而 PID2 的 IAE 为 372。
<p
资料编号:[5139]</p
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

