英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于PLC的感应电机监控系统的设计与实现
Maria G. Ioannides, Senior Member, IEEE
摘要
描述了基于可编程逻辑控制器(PLC)技术的感应电动机的监视和控制系统的实现。此外,提供用于速度控制和保护的硬件和软件的实现,其具有从感应电动机性能的测试获得的结果。PLC将操作参数与用户请求的速度相关联,并在正常操作期间和在跳闸条件下监视系统与常规控制系统相比,由变频器驱动并由PLC控制的感应电动机系统的测试证明速度调节具有更高的精度。 在高速度下,PLC控制的效率提高到同步速度的95%。因此,PLC被证明是电驱动器的工业控制中非常通用和有效的工具。
关键词:计算机控制系统、计算机监控、电力驱动、电机、运动控制、可编程逻辑控制器(PLC)、变频驱动、电压控制。
- 引言
因为用于电驱动器的运动控制的技术已经可用,在电机应用中使用带有电力电子的可编程逻辑控制器(PLC)已经在制造自动化中引入[1,2]。这种使用提供了一些优点,例如在打开时电压降低,以及控制电机和其他设备的能力几乎是一致的功率因数[3]。许多工厂在自动化过程中使用PLC来降低生产成本并提高质量和可靠性[4-9]。 其他应用包括由于使用PLC而具有改进的精确计算数控(CNC)的机床[10]。为了获得准确的工业电驱动系统,必须使用有电源转换器,个人计算机和其他电气设备接口的PLC [11-13]。然而,这使得设备更复杂,更昂贵[14,15]。
有关PLC控制的直流电机的论文很少。他们报告了使用PLC来改变电枢电压的直流电动机和发电机组的速度控制的模糊方法的实现[16],以及基于自调节调节器技术的自适应控制器结合到现有的工业PLC[17]。以及其他类型的机器与PLC接口。因此,工业PLC用于控制步进电机五轴转子位置,方向和速度,减少电路元件的数量,降低成本,增强可靠性[18]。对于开关磁阻电机作为可调速交流和直流驱动器的可能替代品,用于控制扭矩和速度的单芯片逻辑控制器使用PLC来实现与功率控制器耦合的数字逻辑[19]。其他报告的应用涉及到乘客电梯的线性感应电动机,其采用实现驱动系统和数据采集的控制的PLC[20]。为了监测电力质量和识别干扰电厂的生产的干扰,使用两个PLC来确定设备的灵敏度[21]。
在PLC的感应电机领域只有少数论文。用于三相感应电动机的功率因数控制器利用PLC来改善功率因数并在整个控制条件下保持其电压与频率比恒定[3]。矢量控制集成电路使用复杂的可编程逻辑器件(CPLD)和整数运算来实现三相脉宽调制(PWM)逆变器的电压或电流调节[22]。
除了电机控制功能,处理几个特定的模拟和数字I/O信号,家庭信号,跳闸信号,开、关和反转命令外,感应电机还有很多需的要应用。在这种情况下,必须将包括PLC的控制单元添加到系统结构中。本文提出了一种基于PLC的三相感应电机的监控系统。它描述了所配置的硬件和软件的设计和实现。在感应电动机性能方面获得的测试结果表明,在可变负载恒速控制运行中,效率提高,精度提高。因此,PLC能将操作参数关联并控制到用户请求的速度设定点,并在正常操作期间和在跳闸条件下监控感应电机。
- PLC作为系统控制器
PLC是基于微处理器的控制系统,专为工业环境中的自动化过程而设计。 它使用可编程存储器用于内部存储用户指令,和实现特定功能,如算术,计数,逻辑,顺序和时序[23,24]。PLC可以被编程为感测,激活和控制工业设备,并因此包括多个I/O点,这允许电信号被接入。其中过程的输入设备和输出设备连接到PLC,控制程序输入PLC存储器(图1)。
图1 PLC的控制作用
窗体顶端
在我们的应用中,它通过模拟和数字的输入输出控制感应电机的负载变化和恒定速度操作。此外,PLC连续监视输入,并根据控制程序激活输出。该PLC系统是由特定的硬件构建块(模块)组成的模块化类型,可直接插入专用总线:中央处理器单元(CPU),电源单元,输入输出模块I/O和程序终端。 这样的模块化方法的优点在于,初始配置可以扩展用于其它未来的应用,例如多机器系统或计算机链接。
窗体底端
三、感应电机控制系统
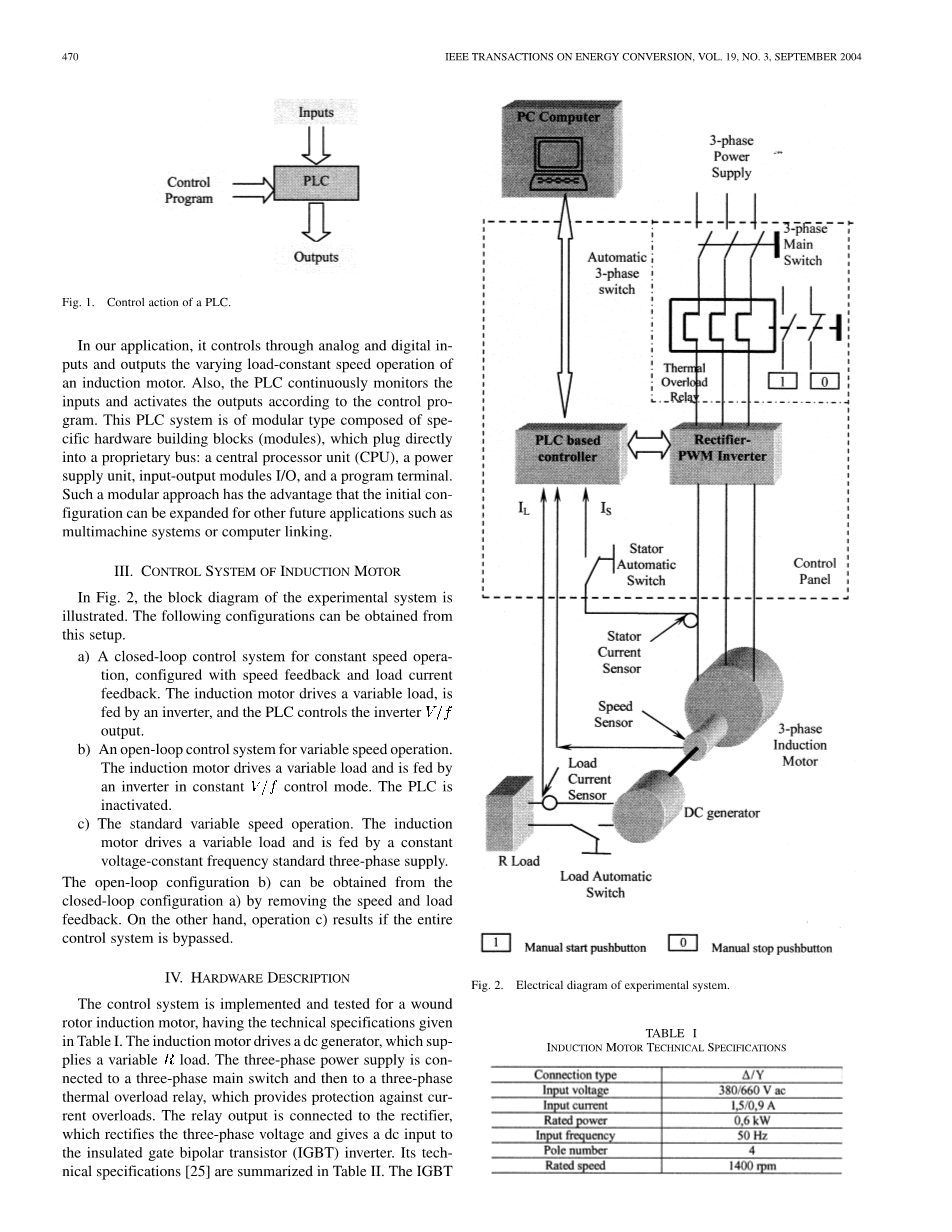
参考图2,示出了实验系统的框图。 可以从此设置获得以下配置。
a)用于恒速运行的闭环控制系统,配置有速度反馈和负载电流反馈。 感应电动机驱动可变负载,由变频器馈电,PLC控制变频器的输出。
b)用于变速操作的开环控制系统。感应电动机驱动可变负载,并由恒定控制模式下的逆变器馈电。PLC并未激活。
c)标准变速操作。感应电动机驱动可变负载,并由恒定电压恒定频率标准三相电源馈电。
开环配置b)可以从闭环配置a)通过移除速度和负载反馈来获得。另一方面,如果整个控制系统被旁路,则产生操作c)。
- 硬件描述
该控制系统用于绕线转子感应电动机的实施和测试,其具有表1中给出的技术规格。感应电动机驱动提供可变负载的直流发电机。三相电源连接到三相主开关,然后连接到三相热过载继电器,从而提供对电流过载的保护。继电器输出连接到整流器,整流器对三相电压进行整流,并向绝缘栅双极晶体管(IGBT)逆变器提供直流输入。其技术规格[25]总结在表II中。IGBT逆变器将直流电压输入转换为三相电压输出,提供给感应电机的定子。另一方面,逆变器与基于PLC的控制器接口相连。
表一 感应电机技术规范
表二 逆变器的技术规格
该控制器在PLC模块化系统上实现[5,[26- 28]。PLC架构指的是其内部硬件和软件。作为基于微处理器的系统,PLC系统硬件被设计和建立有以下模块[29-37]:
bull;中央处理器单元(CPU);
bull;离散输出模块(DOM);
bull;离散输入模块(模糊);
bull;模拟输出模块(AOM);
bull;模拟输入模块(AIM);
bull;电源。
PLC配置的其他细节如表三和四所示。
表三PLC组态
表四PLC模块和I/O指定
速度传感器用于速度反馈,电流传感器用于负载电流反馈,第二个电流传感器连接到定子电路[32]。因此,通过使用负载电流传感器,速度传感器和AIM来建立闭环系统的两个反馈回路。
转速传感器(永磁直流电动机)用于速度传感。感应电机机械地驱动其轴,并产生输出电压,其大小与旋转速度成比例。极性取决于旋转方向。来自转速计的电压信号必须匹配AIM(0-5V直流和200-k内部电阻)的指定电压范围。
图2 实验系统电气图
其他PLC外部控制电路使用24 V直流的低压电源设计。
对于手动控制,该方案配备有启动,停止和跳闸按钮,以及正向和反向方向选择器开关。如图2所示,所有描述的组件有:主开关,自动三相开关,自动单相开关,三相热过载继电器,负载自动开关,信号灯(前进,后退,起动,停止,跳闸),按钮(开始,停止,跳闸),选择开关(用于前/后旋转方向),速度选择器,增益选择器以及PLC模块和整流变频器安装在控制面板。程序从个人计算机PC和RS232串行接口下载到PLC中。
- 软件描述
PLC的编程基于的是输入设备的逻辑要求,所实现的程序主要是逻辑而不是数值计算算法。大多数编程操作在直接两状态“开或关”基础上工作,并且这些替代可能性分别对应于“真或假”(逻辑形式)和“1或0”(二进制形式)。因此,PLC为使用模拟设备构建的基于电路继电器的控制系统提供了灵活的可编程替代。
所使用的编程方法是梯形图方法。PLC系统以在主计算机终端上运行的软件工具的形式提供设计环境,其允许开发,验证,测试和诊断梯形图。首先,高级程序是用梯形图编写的[33,34]。然后,梯形图被转换为二进制指令代码,使得它们可以存储在随机存取存储器(RAM)或可擦除可编程只读存储器(EPROM)中。每个连续指令由CPU解码和执行。CPU的功能是控制存储器和I/ O设备的操作,并根据程序处理数据。PLC上的每个输入和输出连接点都有一个地址,用于标识I/O位。用于直接表示与输入,输出和存储器相关联的数据的方法基于以下事实:PLC存储器被组织成三个区域:输入图像存储器(I),输出图像存储器(Q)和内部存储器M)。任何内存位置都直接引用%I,%Q和%M(表III)。
图3 主程序流程图
PLC程序在主程序循环中使用循环扫描,以便对输入变量进行定期检查(图3)。程序循环通过扫描系统的输入并将它们的状态存储在固定存储器位置(输入图像存储器I)中而开始。然后梯级程序逐个梯级执行。扫描程序和解决各种梯形图的逻辑决定了输出状态。更新的输出状态存储在固定存储单元(输出图像存储器Q)中。保存在存储器中的输出值然后用于在程序扫描结束时同时设置和复位PLC的物理输出。对于给定的PLC,完成一个周期或扫描时间所需的时间为0,18 ms/K(1000步),最大程序容量为1000步。
开发系统包括通过RS232端口连接到目标PLC的主计算机(PC)。主计算机提供用于执行文件编辑,存储,打印和编程操作监视的软件环境。开发在PLC上运行的程序的过程包括:使用编辑器绘制源梯形图程序,将源程序转换为将在PLC的微处理器上运行的二进制目标代码,并将目标代码从PC下载到PLC系统通过串行通信端口。PLC系统在对机器进行主动控制时处于在线状态,并监视任何数据以检查其是否工作正常。
- PLC速度控制软件
图4速度控制软件流程图
如图4所示为速度控制软件的流程图。该软件调节速度并监视恒定速度控制,而不考虑扭矩变化。作为电机电源的变频器执行该操作。同时,由PLC的软件控制。如果没有带反馈和PLC的控制回路,变频器无法保持速度恒定。
从控制面板,操作员可选择转速设定值和前、后旋转方向。然后,通过按下手动启动按钮,电机开始旋转。如果按下停止按钮,则旋转停止。相应的输入信号连接到DIM,输出信号连接到DOM,如表IV所示。
AIM接收来自定子电流传感器的跳闸信号,来自测速发电机的速度反馈信号和来自控制面板的信号。这样,PLC读取电机的请求速度和实际速度。操作员请求的速度与电机实际速度之间的差异给出了误差信号。如果误差信号不是零,而是正或负,则PLC根据CPU执行的计算减小或增加逆变器的值,因此,电动机的速度被校正。
所实现的控制是比例和积分(PI)类型(即,误差信号乘以增益,积分并添加到请求的速度)。然后,控制信号被发送到DOM并连接到逆变器的数字输入以控制变化。在开始时,操作者通过使用安装在控制面板上的旋转电阻器(增益调节)来选择增益,并且AIM作为控制器增益信号(0-10V)接收其压降。
使用旋转电阻选择请求的速度,AIM读取该信号。其值被发送到AOM并显示在控制面板(速度设定点显示)上。控制面板的另一个显示屏显示从速度反馈信号计算的实际速度。第三个显示器显示由负载电流信号计算的负载扭矩,单位为牛顿 - 米(N m)。它们的相应信号被输出到AOM(表IV)。
B.监控与保护软件
图五 监控与保护软件流程图。
图5显示了该软件的流程图。
在电机运行期间,不能通过更改开关位置来改变其旋转方向。在方向反转之前,必须按下停止按钮。
为了防止启动和加载过程中的过载电流,在软件中编写了以下命令。
1)前进/后退信号输入到DIM。
2)转速设定值信号,负载电流,定子电流和速度反馈信号输入到AIM。
3)无负载时,如果速度设定值低于20%或,电机将无法启动。
4)在超过0.4 N·m(额定转矩的40%)的负载下,以及,和转速设定值低于40%或时,电机不会启动。
5)如果负载增加超过1.0 N·m(额定转矩),如果速度设定值超过100%或,电机进入切断程序。
6)在所有其他情况下,电机进入速度控制模式,速度控制软件按照A节所述执行。
C.cutoff和启动电机的软件
参见图6,该软件的流程图如图所示。
图6切断/重启电机软件流程图
bull;在过载情况下,电机被切断,跳闸灯(黄色)亮起。 操作员必须释放热继电器,然后必须通过按下跳闸或停止按钮关闭跳闸灯。 热继电器设置为电机额定电流1.5A,随后,电机可以重新启动。
bull;可以通过操作者按下停止按钮切断电机:实际速度的显示设置为零,启动指示灯(绿色)关闭,停止指示灯(红色)亮起并保持点亮3秒。
bull;在电机切断后,驱动系统重新启动之前,必须立即断开负载。 即使按下启动按钮,电机也不会在切断后3秒之前启动。
六、结果
该系统在运行期间在变化的负载下测试,包括感应电动机速度控制性能的测试和跳闸情况的测试。PL
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[140469],资料为PDF文档或Word文档,PDF文档可免费转换为Word

