
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
英文翻译
原文标题 A fuzzy PLC control system for a servomechanism
译文标题 伺服机构的模糊PLC控制系统
伺服机构的模糊PLC控制系统
Iulia Dumitru*, Nicoleta Arghira*, Ioana Fagarasan*, Sergiu Iliescu*
自动控制和工业信息学部,
自动控制和计算机系,
罗马尼亚布加勒斯特大学“POLITEHNICA”
(电子邮件:{iulia,nicoleta,ioana,iliescu}@shiva.pub.ro)
摘要:本文介绍了一个实际应用于伺服机构的模糊-PLC系统的案例研究。 所提出的方法实现了平滑的模糊控制,可以很容易地在PLC系统中实现。 伺服机构的速度受到控制。
关键词:模糊控制,可编程控制器(PLC),模糊-PLC系统,过程控制,计算机控制系统。
引言
近年来,我们协助了行业和信息技术的快速变革。如今,所有设备的控制都是通过使用计算机来完成的。大多数设备使用可编程逻辑控制器(PLC)与计算机连接并监视每个负载和耗电情况。 PLC在工业控制中被广泛使用,因为它们易于安装并且在应用中非常灵活。 PLC通过其输入和输出与外部世界进行交互。
在工业自动化应用中,梯形逻辑(一种在可编程逻辑控制器上运行的编程语言)通常用于离散事件控制。对于连续控制,更经常使用PID型控制器。 1974年,第一个模糊控制应用出现了(Mamdani,1974)。从那以后,即使可以使用传统方法(Mamdani,1993),模糊逻辑控制(FLC)也被认为是设计动态系统控制器的首选方法。
本文介绍了伺服机构的速度控制。使用PLC上实现的模糊逻辑控制(FLC)来获得系统的良好性能。
模糊控制器的背景
实践中有许多不同的过程,它们的属性是要控制的过程。 例如,我们希望电机的旋转速度等于任何负载转矩的一定值,我们希望飞机不要掉下来,我们希望增加发电厂的电力,减少空气污染,我们希望增加硬盘的容量,所以我们必须使用更准确的控制设备。
该规则基于反馈控制,见图1.系统y(t)的输出由传感器测量。 控制器根据测得的输出y(t)及其参考yr(t)计算系统u(t)的输入,并通过执行器将该值应用于系统。
图1:反馈控制回路
对于控制设计,必须知道系统行为。为此,通常我们必须用数学工具来描述系统。我们经常进行物理分析,首先得到一个微分和代数方程组。第二步是确定系统的输入和输出,从系统的数学方程中描述一个所谓的模型,如果需要的话,线性化它。然后,
我们可以测量系统参数并用数值记录整个模型(Jirka Roubal)。
当系统的模型确定时,可以设计一个控制器。有很多方法来设计控制器。它取决于应该达到的性能(例如,系统的稳定性和系统行为的质量,根据标准的系统的最佳行为等)
另一种开发控制器的方法是使用模糊集合,而不是用于模糊理论算术的数字。
控制过程中所需的数据由测量系统提供。 这些数据包括测量单位,测量变量和可能的其他一些在这种情况下不感兴趣的数值。 测量单位是物理单位,即米,而测量值是无量纲测量结果。 为了调节所有可能的数据的组合,可以将它们映射到实数组,可以使用相应数量的测量值。 这些数字可用数字的直线图形表示,如图2(Amira)所示。
图2:将数据集X映射到实数
但是,不使用过程的数学模型也是不确定性的来源。 例如,设计模糊系统的许多自由度可能是一个缺点。以下概述提供了模糊控制的优点和缺点(西门子,2003):
在计算机上简单地实施口头表达的规则(如果......,然后......)以解决问题。模糊系统的行为对人类是可以理解的。与传统方法相比,避免了数学描述的昂贵开发。可能用于处理复杂和涉及的过程。对系统知识不够了解的任务定义以及对系统行为知之甚少或非常不精确的结果会导致糟糕的,可能无法使用的模糊解决方案。如果系统行为改变,通常不具有适应性和学习能力。由于许多自由度,系统的设计需要经验。
下图(图3)说明了模糊控制器的组成部分及其功能原理。 模糊控制基于一组规则,称为规则库。
图3:模糊控制器的组成部分及其功能原理
功能原理分为以下几个步骤:模糊化 - 语言值的满足度(模糊集的隶属度):
语言变量被分配给非模糊输入值。推论 - 对于规则库的每个规则,THEN部分的完成程度由IF部分通过某种方法实现的程度形成。这个过程也被称为暗示。 THEN部分的完成程度等同于规则的完成程度,也称为规则强度。所有这些单独的规则评估结果一起导致输出信号的一个隶属函数,也称为组合。由此产生的隶属函数描述了一个“模糊控制命令”。当IF部分包含组合语句“IF ... AND ...”(THEN ....)时,首先执行模糊逻辑AND操作,并且在整体规则评估中使用履行度。所有这些陈述一起被称为聚合。去模糊化 - 从模糊控制命令(以所得隶属函数的形式)为控制变量计算最具代表性的数值(非模糊)输出值。
3.服务能力
3.1伺服机构的数学描述
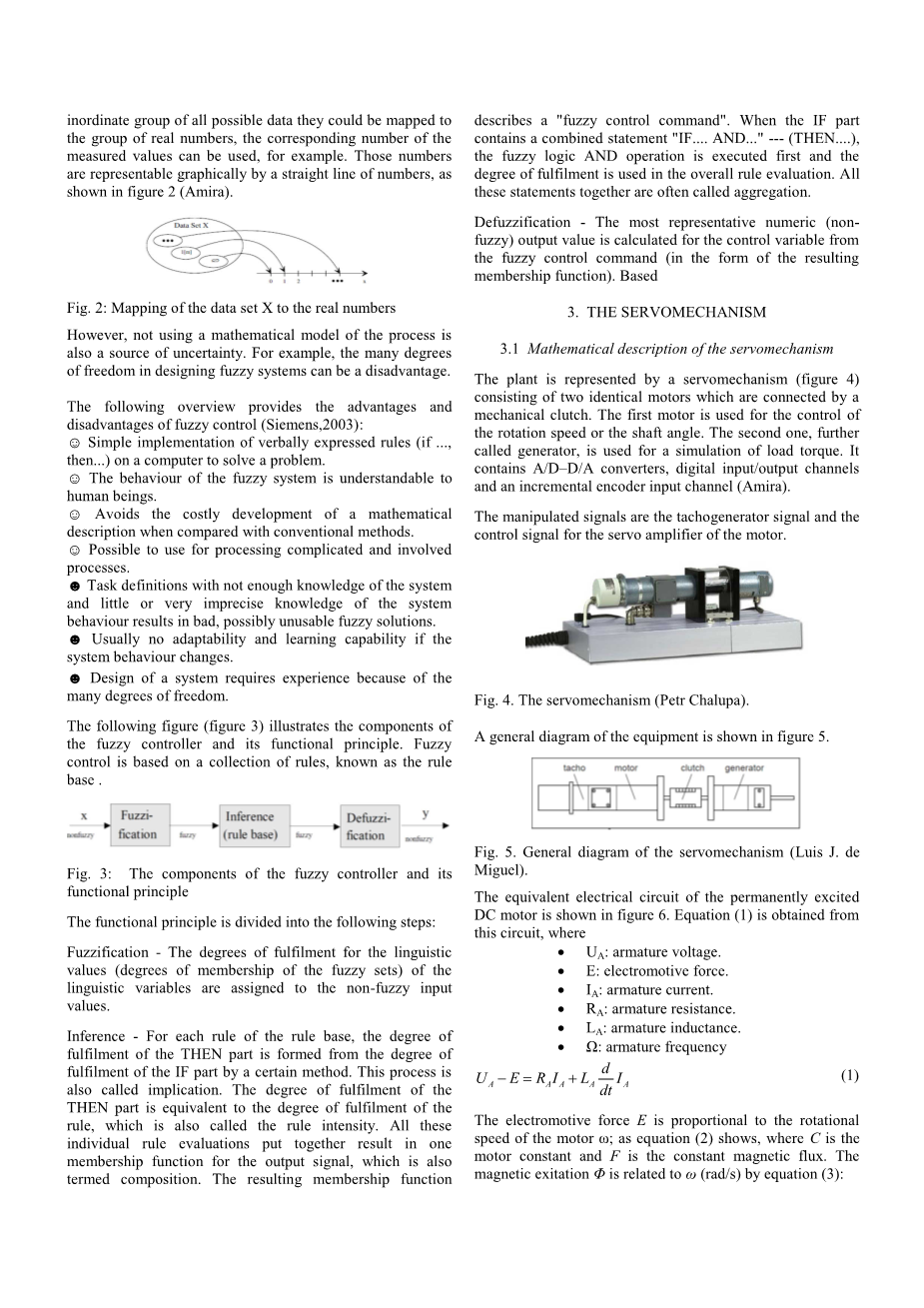
该设备由伺服机构(图4)代表,该伺服机构由两个相同的电机组成,这些电机通过机械离合器连接。 第一台电机用于控制转速或轴角。 第二个,又称发电机,用于模拟负载转矩。 它包含A / D1D / A转换器,数字输入/输出通道和增量编码器输入通道(Amira)。 操纵信号是电机伺服放大器的测速信号和控制信号。
图4.伺服机构(Petr Chalupa)
图5显示了该设备的总体示意图。
图5.伺服机构的总图(Luis J. de Miguel)。
永磁直流电动机的等效电路如图6所示。等式(1)由该电路获得,其中
- UA:电枢电压。
- E:电动势。
- IA:电枢电流。
- RA:电枢电阻。
- LA:电枢电感。
- ȍ:电枢频率。
电动势E与马达rotational的转速成比例; 如公式(2)所示,其中C是电机常数,F是恒定磁通量。 方程(3)中磁场ex与Ȧ(rad / s)有关:
图6.直流电机的等效电路。
如等式(4)所示,由电动机产生的转矩M与电枢电流IA成比例:
3.2参数的识别和模糊控制器的计算
该过程实现的模糊控制器的结构为,如图7所示。
图7:模糊控制器的结构
为模糊变量选择以下名称:
- x:加速度
- y:SpeedError
z:控制信号
模糊控制器内核的实际传递函数是z = f(x,y),其中由模糊集合,模糊变量和模糊规则定义的函数f是任意的。 我们的模糊控制器使用“区域中心”(coa)方法进行解模糊化。 单个模糊集合总是具有与Max-Prodmethod的权重无关的相同区域中心。 因此,只有一个模糊集合的模糊输出变量的值总是等于该模糊集合的区域的恒定中心值。 所以输出值是:
相反,如果模糊输出变量有两组,则其值只能在两组区域的两个中心之间,具体取决于每组的权重。 在极端情况下,变量的两个模糊集中的一个的权重为零,这导致输出变量的值等于另一个模糊集的面积的中心。 所以输出值是:
关于r3000 rpm的转速范围,可以达到6000转的最大控制误差信号。 因此,y的定义范围是:
但是,如果考虑到速度控制的期望性能,则建议显着限制上述间隔。 模糊变量定义范围界限处的模糊集合的值持续到无穷大。 如果例如上面提到的间隔被限制在r1000的范围内并且输入值是 6000,则输入变量的行为就像输入值是 1000一样。
x的定义范围受采样周期内最大y偏差的限制。 为了计算这个值,假定最大控制信号10V。
代表系统的机械时间常数。 结果是:
因此x的定义范围是:
控制器的控制信号被限制在-10V至 10V的范围内。 跟随模糊控制器内核的积分器无法以更大的值运行。 输出变量的定义范围直接影响环路放大,因此在一定程度上决定了闭环的动态。 如果20ms的控制信号范围在5ms的采样周期内通过,则模糊控制器内核的最大输出值由下式确定:
当n = 20时,zmax = 200V,则z的定义范围为:
由于此时模糊控制器的行为是未知的,因此每个变量的定义范围分为“正”,“空”和“负”三个部分。 名称为“null”的集合将在零点之上定义,并且它延伸超过整个定义范围的1/3。
3.3模糊PLC控制系统
所设计系统的总体视图如图8所示。图8显示了伺服机构,带有数字/模拟I / O的PLC系统,处理器与PLC之间的连接模块,用于描述传感器状态的模拟板和 PLC的开关和安装有用于编程PLC的软件的PC以及模糊控制器的实现。
图8:设计的系统
4.模糊PLC控制系统
4.1模拟板
仿真板在24V的稳定直流电压下工作,例如, 随PLC系统的电源单元一起提供。 插座用于将模拟板上的传感器和开关连接到PLC系统。 系统模拟器上的安全插座根据分配连接到传感器和开关。 这些开关和传感器中的每一个都可以作为接通或断开触点(Dumitru)。
4.2 PLC系统
可编程逻辑控制器是模块化的,工业强化的计算机,通过模块化输入和输出(I / O)模块执行控制功能。 PLC的模块化使得用户可以将通用I / O模块与合适的控制器相结合,形成专门用于他最简单理解的需求(Yasar Birbir)的控制系统。 通过设想重复执行三个步骤来操作控制器:
- 从输入模块读取输入。
- 解决预编程的控制逻辑。
- 根据控制逻辑解决方案生成输出到输出模块。 过程的输入设备和输出设备连接到PLC,并将控制程序输入到PLC存储器中。
在我们的应用中,PLC系统通过模拟和数字输入进行控制,并输出电机的负载恒定速度变化操作。 此外,PLC连续监视输入并根据控制程序激活输出。 我们的应用中使用的PLC是SIMATIC S7-300系列工业PLC。 用于配置和编程Simatic可编程逻辑控制器的标准软件是第7步。可用于S7-300的编程语言有梯形图,语句表和功能块图:
语句列表(或STL)是一种文本表示,类似于机器代码。 如果一个程序被写入语句列表中,则各个指令对应于CPU执行程序的步骤。
- 梯形逻辑图(或LAD)是主要用于开发用于工业控制应用的可编程逻辑控制(PLC)软件的编程语言。 LAD代表一个程序,由基于继电器的逻辑硬件的电路图上支持的图形图表。 通过梯子,您可以跟踪通过各种触点,复杂元件和输出线圈(Ivanescu)的电源轨之间的功率流。
- 功能块图(FBD)是一种图形表示,它使用布尔代数熟悉的逻辑框来表示逻辑。
S7-300是一个模块化的系统解决方案控制系统,主要侧重于生产工程。 各种各样的组件非常适合满足所有要求和灵活的应用。 S7-300包含以下类型的模块(Siemens,2004):
- 中央处理单元(CPU)
- 电源模块(PS)
- 接口模块(IM)
- 通信处理器(CP); (用于连接到PROFIBUS)
- 数字和模拟模块现在称为Dsignal模块E(SM)
在实际应用中,S7-300模块插入基板上的异型导轨,通过后面板总线固定并相互连接,以实现系统兼容。 该系统通过特定的连接器适配器快速安全地与模块上的输入和输出电连接。 由于其建设,该系统开放给未来的发展(Dumitru)。
4.3模糊执行
PLC系统SIMATIC Step 7 V6.2软件已用于编程PLC系统。 在此,使用编程块已经创建了获得对系统的期望控制所需的软件。 很明显,编程块中使用的描述也使用考虑到硬件描述获得的地址。 该系统的FLC应用程序已由Fuzzy Control V5.0软件执行。 首先,使用Fuzzy Control V5.0软件将输入和输出隶属函数和规则图信息传输到计算机环境中,并准备好用于控制。 此外,这些将受专家知识的控制
模糊控制 由一个软件包组成,该软件包能够为过程实现高质量的全自动控制系统。处理过程如下:瞬时输
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21544],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

